一种复合材料液压机滑块快速下行的控制方法与流程
本发明涉及一种液压机滑块快速下行的控制方法,特别是一种复合材料液压机滑块快速下行的控制方法。
背景技术:
1、快速下行是液压机滑块运行的基本动作之一,液压机滑块快速下行速度一般远大于工进速度;大多数复合材料的压力成形工艺均属于热模压,工艺动作设计时关注于减少热量损失,要求尽可能缩减工进压制过程以外的液压机滑块动作时间;此外,随着社会对复合材料工业品需求量的急速增长,生产效率成为衡量复合材料液压机制造水平的重要指标;实现高速、平稳的滑块快速下行运动控制能够有效缩短液压机空程运行时间,从而提升复合材料制件的生产节拍、降低生产过程中的热能损失。
技术实现思路
1、本发明的目的在于提供一种复合材料液压机滑块快速下行的控制方法,以高速、平稳运行为目标设计基于比例节流阀调节的滑块快速下行控制算法与运动规划算法。
2、本发明的技术方案如下:
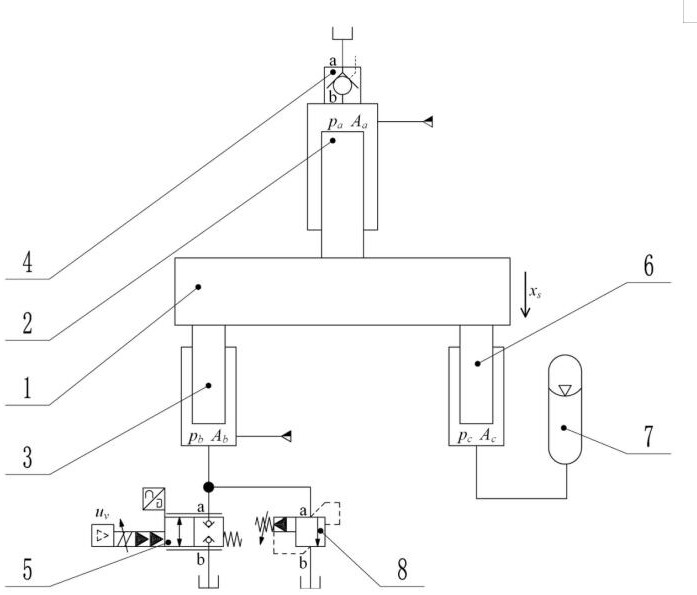
3、液压机滑块由主液压缸与回程液压缸驱动;主液压缸在滑块快速下行时通过充液阀补充液压介质至作用腔;回程液压缸在滑块快速下行时通过比例节流阀调节排出作用腔的液压介质;平衡液压缸用于抵消滑块装配体的部分重力,平衡液压缸作用腔内的介质压力通过蓄能器调节;背压阀用于在滑块工进阶段调节回程液压缸作用腔内的介质压力;主液压缸作用腔与充液阀的b口、液压系统供液口连通;回程液压缸作用腔与比例节流阀的a口、背压阀的a口、液压系统供液口连通;充液阀的a口、比例节流阀的b口、背压阀的b口与介质收集箱连通;平衡液压缸的作用腔与蓄能器油口连通;
4、 x s,,分别是滑块的位移、速度、加速度; p a是主液压缸作用腔内介质压力、 a a是主液压缸的作用面积; p b是回程液压缸作用腔内介质压力、 a b是回程液压缸的作用面积; p c是平衡液压缸作用腔内介质压力、 a c是平衡液压缸的作用面积; x s通过位移传感器检测; p a, p b, p c通过压力传感器检测;,通过数值微分计算得到。
5、一种复合材料液压机滑块快速下行的控制方法至少包括如下步骤:
6、步骤1:滑块在快速下行时的动力学方程为:
7、
8、式中: m是滑块装配体的质量; g是重力加速度; f sc是滑块装配体下行受到的摩擦力,为常数;滑块快速下行时的速度远大于工进时的速度,液压系统提供的介质流量来不及填充变化的主液压缸作用腔,主液压缸作用腔需要通过充液阀从介质收集箱补充吸入液压介质,所以 p a≈0; f sv是滑块装配体下行时受到的粘滞阻力,与滑块的运行速度成正比,可建模为
9、
10、式中: k sv是粘滞系数,是一个正常数;
11、步骤2:平衡液压缸作用腔内介质压力 p c受蓄能器调节:
12、
13、式中: v c是蓄能器内的气体容积; p c1是滑块处于行程上限位时蓄能器的压力; v c1是滑块处于行程上限位时蓄能器内的气体容积; r是蓄能器内气体容积变化的过程指数,是一个常数;当滑块下行时从平衡液压缸作用腔内排出的液压介质进入蓄能器,蓄能器内气体被压缩、压力增高,当滑块运行到行程下限位时 p c达到最大值 p c2;设滑块的行程为 l s,蓄能器的配置要求为:a) 具有大于 a c× l s且足够的有效工作容积;b) 合理设置 p c2= p c1[ v c1/( v c1– a c× l s)] r且满足 p c2< mg,确保滑块具有符合需求的动态能力; p c1、 v c1、 p c2可以根据蓄能器的特性进行设置;
14、步骤3:基于比例节流阀的压力–流量映射特性可以得到在滑块快速下行时回程液压缸作用腔内介质压力 p b与滑块速度的关系:
15、
16、式中: q b是滑块下行时从回程液压缸作用腔内排出的液压介质的流量; u v是比例节流阀的控制信号; k v是比例节流阀的流量系数,是一个正常数; p b可通过比例节流阀调节:
17、
18、结合以上步骤的推导可以得到比例节流阀控制信号 u v以滑块快速下行时各物理状态为变量的非线性函数关系式:
19、
20、步骤4:规划滑块快速下行运动的期望为:
21、
22、式中: x sd是滑块运行位移 x s的期望; f s( t)是一个以时间 t为自变量的高阶连续光滑函数;将滑块快速下行运动规划为4个阶段:加速段、恒速段、减速段与过渡段;比例节流阀的控制函数设定为:
23、
24、将所规划滑块运动期望的函数 f s( t)代入 u v的函数表达式即可得到比例节流阀在滑块快速下行加速段、恒速段与减速段的控制函数:
25、
26、在滑块快速下行的过渡段,比例节流阀逐渐关闭,回程液压缸作用腔内介质压力 p b由比例节流阀调节过渡为背压阀调节;以 u v1( t)在减速段终止时的值为初始值、以0为终止值设计与 u v1( t)光滑连续的 u v2( t), u v2( t)的动态过程与背压阀的动态特性相匹配,从而避免过渡过程发生冲击、振动;为避免滑块下行失速,需要对 u v1( t)与 u v2( t)进行饱和限幅。
27、本发明的有益效果如下:
28、1、本发明基于比例节流阀压力–流量映射特性设计的液压机滑块快速下行控制方法能够实现对系统非线性动态的补偿调节,即使在滑块驱动中存在蓄能器平衡调节的强非线性过程也具备有效的应对能力,具有通用性;
29、2、本发明在非线性调节的前提下进一步规划液压机滑块快速下行过程的动态期望,提出滑块从快速下行转换到工进过程的过渡调节方法,确保过渡过程中系统调节切换平滑无冲击。
- 还没有人留言评论。精彩留言会获得点赞!