一种液压机横梁焊接机器人
本发明涉及横梁焊接,尤其涉及一种液压机横梁焊接机器人。
背景技术:
1、液压机是一种以液体为工作介质,根据帕斯卡原理制成的用于传递能量以实现各种工艺的机器;液压机一般由本机、动力系统及液压控制系统三部分组成;大型整体等温模锻件需要大型液压机加工,液压机横梁作为液压机整体的重要组成部分,主要起到承受载荷效果,液压机横梁在制造过程中需要进行焊接作业。
2、液压机横梁用焊接机器人可参考公开号为cn103286422b的专利,焊接装置具备沿着平行设置的第一行走轨道及第二行走轨道移动的第一行走躯体及第二行走躯体;设置在第一行走躯体的第一横梁上的焊接机器人;设置在第二行走躯体的第二横梁上的焊接机器人,对配置在两轨道间的被焊接构件独立地进行焊接作业,焊接装置形成在第一行走躯体与第二行走躯体对置的位置,第一横梁的前端与第二横梁的前端不会相互接触的长度,焊接机器人设置在沿着第一横梁移动的一侧横行框架上,焊接机器人设置在沿着第二横梁移动的另一侧横行框架上。
3、现有液压机横梁用焊接机器人在应用过程中,其固定部件对液压机横梁缺乏有效限位固定,极易在焊接过程中发生位移,影响液压机横梁焊接质量,且焊接机器人的固定部件只适用于少量规格液压机横梁焊接作业,当需要进行其他规格液压机横梁焊接作业时,则还需对固定部件进行更换,过程较为繁琐。
技术实现思路
1、本公开实施例涉及一种液压机横梁焊接机器人,解决了现有液压机横梁用焊接机器人在应用过程中,其固定部件对液压机横梁缺乏有效限位固定,极易在焊接过程中发生位移,影响液压机横梁焊接质量,且焊接机器人的固定部件只适用于少量规格液压机横梁焊接作业,当需要进行其他规格液压机横梁焊接作业时,则还需对固定部件进行更换,过程较为繁琐的问题。
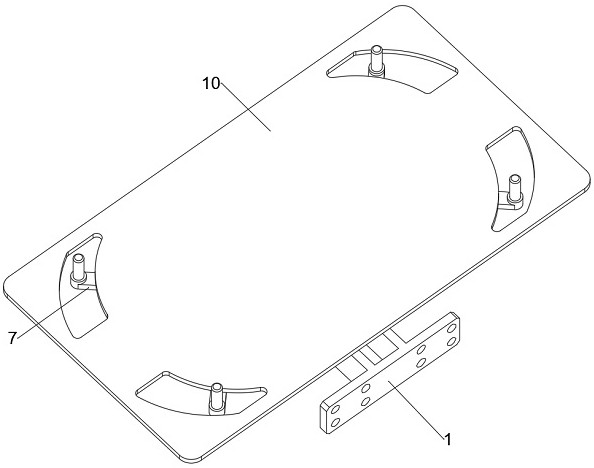
2、本发明公开第一方面,提供了一种液压机横梁焊接机器人,具体包括承重底连架;所述承重底连架通过螺栓与焊接机器人主体固定连接,承重底连架顶部两端分别安装有活动支撑架,承重底连架外部呈倾斜状安装有驱动电机;所述承重底连架内部安装有传动中连轴,驱动电机与传动中连轴传动连接,活动支撑架内部安装有单头传动螺杆,传动中连轴与两个单头传动螺杆相连;所述承重底连架底部安装有双头传动螺杆,双头传动螺杆与两个活动支撑架相连;所述活动支撑架端部呈对称状连接有两个活动夹连杆,活动支撑架顶部连接有活动调节件,活动调节件外部连接有两个传动连接杆,传动连接杆与活动夹连杆相连;所述承重底连架顶部固定安装有焊接放置平台,活动支撑架顶部与焊接放置平台底部相接触,活动夹连杆位于焊接放置平台底部。
3、至少一些实施例中,所述活动夹连杆与活动支撑架转动连接,活动夹连杆顶部设有竖夹柱,焊接放置平台内部设有四个异形活动孔,活动夹连杆所设有的竖夹柱活动于焊接放置平台所设有的异形活动孔内。
4、至少一些实施例中,所述活动支撑架顶部设有滑槽,活动调节件底部设有滑块,活动调节件所设有的滑块滑动连接于活动支撑架所设有的滑槽内,传动连接杆一端与活动夹连杆转动连接,传动连接杆另一端与活动调节件转动连接,当液压机横梁放置在焊接放置平台顶部时,活动调节件向外移动,活动调节件通过传动连接杆带动两个活动夹连杆同步向内转动调节,竖夹柱在异形活动孔内活动,使四个竖夹柱与液压机横梁相接触,起到对液压机横梁夹持固定效果,保障液压机横梁焊接过程中的稳定性。
5、至少一些实施例中,所述传动中连轴与承重底连架转动连接,传动中连轴外部安装有从动锥齿轮,驱动电机的驱动轴上安装有主动锥齿轮,主动锥齿轮与从动锥齿轮啮合。
6、至少一些实施例中,所述单头传动螺杆与活动支撑架转动连接,活动调节件内部设有螺孔b,单头传动螺杆螺纹连接于活动调节件所设有的螺孔b内,当驱动电机带动传动中连轴转动时,传动中连轴带动两个单头传动螺杆同步转动,单头传动螺杆带动活动调节件沿滑槽同步移动,实现对四个活动夹连杆同步调控作业。
7、至少一些实施例中,所述承重底连架相对两端分别设有四个导向滑孔,活动支撑架外部设有四个导向滑杆,活动支撑架所设有的导向滑杆贯穿于承重底连架所设有的导向滑孔内。
8、至少一些实施例中,所述双头传动螺杆与承重底连架转动连接,活动支撑架底部设有螺孔a,双头传动螺杆两端分别螺纹连接于两个活动支撑架所设有的螺孔a内,可根据液压机横梁规格的不同,转动双头传动螺杆,通过双头传动螺杆带动活动支撑架沿导向滑孔移动,改变两个活动支撑架间隔距离,进而改变左右两组竖夹柱间隔距离,更好的满足于不同规格液压机横梁自动化夹持焊接需求。
9、至少一些实施例中,所述传动中连轴相对两端内设有花键槽,单头传动螺杆端部设有花键头,单头传动螺杆所设有的花键头滑动插接于传动中连轴所设有的花键槽内,在双头传动螺杆带动活动支撑架移动调节后,通过花键头与花键槽之间滑动配合,保障传动中连轴与单头传动螺杆之间传动效果,保障传动中连轴与单头传动螺杆之间传动效果。
10、本发明提供了一种液压机横梁焊接机器人,具有如下有益效果:
11、1.本发明在使用时,当液压机横梁放置在焊接放置平台顶部时,活动调节件向外移动,活动调节件通过传动连接杆带动两个活动夹连杆同步向内转动调节,竖夹柱在异形活动孔内活动,使四个竖夹柱与液压机横梁相接触,起到对液压机横梁夹持固定效果,保障液压机横梁焊接过程中的稳定性,以便通过焊接机器人的机械臂进行焊接作业,保障液压机横梁焊接质量;当驱动电机带动传动中连轴转动时,传动中连轴带动两个单头传动螺杆同步转动,单头传动螺杆带动活动调节件沿滑槽同步移动,实现对四个活动夹连杆同步调控作业,保障液压机横梁自动化夹持固定效果。
12、2.可根据液压机横梁规格的不同,转动双头传动螺杆,通过双头传动螺杆带动活动支撑架沿导向滑孔移动,改变两个活动支撑架间隔距离,进而改变左右两组竖夹柱间隔距离,更好的满足于不同规格液压机横梁自动化夹持焊接需求,通用性能强;在双头传动螺杆带动活动支撑架移动调节后,通过花键头与花键槽之间滑动配合,保障传动中连轴与单头传动螺杆之间传动效果,进而保障四个活动夹连杆驱动效果。
13、本发明的其他优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
技术特征:
1.一种液压机横梁焊接机器人,包括承重底连架(1);其特征在于,所述承重底连架(1)通过螺栓与焊接机器人主体固定连接,承重底连架(1)顶部两端分别安装有活动支撑架(2),承重底连架(1)外部呈倾斜状安装有驱动电机(3);所述承重底连架(1)内部安装有传动中连轴(4),驱动电机(3)与传动中连轴(4)传动连接,活动支撑架(2)内部安装有单头传动螺杆(5),传动中连轴(4)与两个单头传动螺杆(5)相连;所述承重底连架(1)底部安装有双头传动螺杆(6),双头传动螺杆(6)与两个活动支撑架(2)相连;所述活动支撑架(2)端部呈对称状连接有两个活动夹连杆(7),活动支撑架(2)顶部连接有活动调节件(8),活动调节件(8)外部连接有两个传动连接杆(9),传动连接杆(9)与活动夹连杆(7)相连;所述承重底连架(1)顶部固定安装有焊接放置平台(10),活动支撑架(2)顶部与焊接放置平台(10)底部相接触,活动夹连杆(7)位于焊接放置平台(10)底部。
2.根据权利要求1所述的一种液压机横梁焊接机器人,其特征在于,
3.根据权利要求1所述的一种液压机横梁焊接机器人,其特征在于,
4.根据权利要求1所述的一种液压机横梁焊接机器人,其特征在于,
5.根据权利要求1所述的一种液压机横梁焊接机器人,其特征在于,
6.根据权利要求1所述的一种液压机横梁焊接机器人,其特征在于,
7.根据权利要求1所述的一种液压机横梁焊接机器人,其特征在于,
8.根据权利要求1所述的一种液压机横梁焊接机器人,其特征在于,
技术总结
本发明提供一种液压机横梁焊接机器人,涉及横梁焊接技术领域,包括承重底连架;所述承重底连架通过螺栓与焊接机器人主体固定连接,承重底连架顶部两端分别安装有活动支撑架,承重底连架外部呈倾斜状安装有驱动电机;所述承重底连架内部安装有传动中连轴,驱动电机与传动中连轴传动连接。可根据液压机横梁规格的不同,通过双头传动螺杆带动活动支撑架沿导向滑孔移动,改变两个活动支撑架间隔距离,进而改变左右两组竖夹柱间隔距离,更好的满足于不同规格液压机横梁自动化夹持焊接需求。解决现有焊接机器人内部固定部件只适用于少量规格液压机横梁焊接作业,当需要进行其他规格液压机横梁焊接作业时还需对固定部件进行更换的问题。
技术研发人员:孟祥懿,宫子琪,李巍,于志超,左维
受保护的技术使用者:天津中德应用技术大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!