状态判定装置及状态判定方法与流程
本发明涉及工业机械有关的状态判定装置及状态判定方法。
背景技术:
1、定期或在异常产生时进行注射成形机等工业机械的维护。在维护工业机械时,通过使用在工业机械的动作时记录的表示该工业机械的动作状态的物理量,维护负责人判定该工业机械的动作状态有无异常,进行产生了异常的部件的更换等维护作业。
2、以下,以注射成形机的情况为例进行说明。作为注射成形机具有的注射缸的逆流防止阀的维护作业,已知有定期地从注射缸抽出螺杆而直接测定逆流防止阀的尺寸的方法。但是,在该方法中必须暂时停止生产来进行测定作业,存在生产率降低这样的问题。
3、作为用于解决这样的问题的现有技术,已知有不进行从注射缸拔出螺杆等使生产暂时停止的操作而间接地检测注射缸的逆流防止阀的磨损量来诊断异常的方法,检测施加于螺杆的旋转转矩,或检测树脂向螺杆后方逆流的现象来诊断异常。
4、例如,在专利文献1、2中公开了通过监督机器学习来针对驱动部的负荷、树脂压力等判定异常。然而,若更换生产所需的金属模具等附带设备、树脂等生产材料,或机械的运转状态、动作状态变动,则从该机械得到的测定值与在机器学习时使用的学习数据产生偏离,产生无法正确地进行基于机器学习的判定这样的问题。
5、在专利文献3中公开了如下内容:关于进行机器学习而导出的异常度推定值,针对由1个学习模型计算出的异常度推定值,导出使用与注射成形的机种、器材关联起来的校正系数进行校正后的异常度校正值。由此,能够将1个学习模型通用地应用于多种多样的机种、附带设备、生产材料,但需要预先准备与附带设备、生产材料对应的校正量,需要对其进行调整的作业。
6、现有技术文献
7、专利文献
8、专利文献1:日本特开2017-030221号公报
9、专利文献2:日本特开2017-202632号公报
10、专利文献3:日本特开2020-044718号公报
技术实现思路
1、发明要解决的课题
2、这样,为了应对生产所需的金属模具等附带设备、树脂等生产材料的变化,需要准备多个状态判定装置、多个学习模型。并且,在机械的运转状态、动作状态变动的情况下(例如,更换生产所需的金属模具等附带设备、或者更换树脂等生产材料的情况下),需要根据该变动来变更有无异常的判定基准、判定方法,作业效率差,需要成本,通用性低。
3、其主要原因在于,若更换附带设备(例如金属模具、金属模具调温机、树脂干燥机等)或生产材料、或者变更运转条件(例如注射速度、注射压力等参数、画面设定值、程序等)、或者暂时停止自动运转而再次启动、或者运转状态、动作状态产生变化、变更,则在该变化、变更的前后根据学习模型计算出的异常度产生大的差异,由此,成为异常度的判定精度恶化或者无法进行正确的判定的事态。
4、具体而言,运转状态、动作状态变化后的测定值与学习模型制作时的测定值(学习数据)相比,有时偏离,尽管是正常的状态,但有时通过机器学习推定出的推定值产生偏移(偏差),判定精度恶化。
5、即,为了应对多种多样的生产环境、操作员的要求,期望使由学习模型计算出的状态判定结果适应工业机械的运转状态、动作状态等的变化的方法。
6、用于解决课题的手段
7、本发明的状态判定装置根据从工业机械取得的时间序列数据,使用学习了异常度的学习模型来推定异常度,在产生了工业机械的运转状态、动作状态变化的事件的定时,根据在该事件的前后得到的多个推定值来计算统计量,导出对根据计算出的统计量通过学习模型推定出的推定值(异常度)进行了校正的推定值(异常度),根据该校正后的推定值来判定异常度,由此解决上述课题。
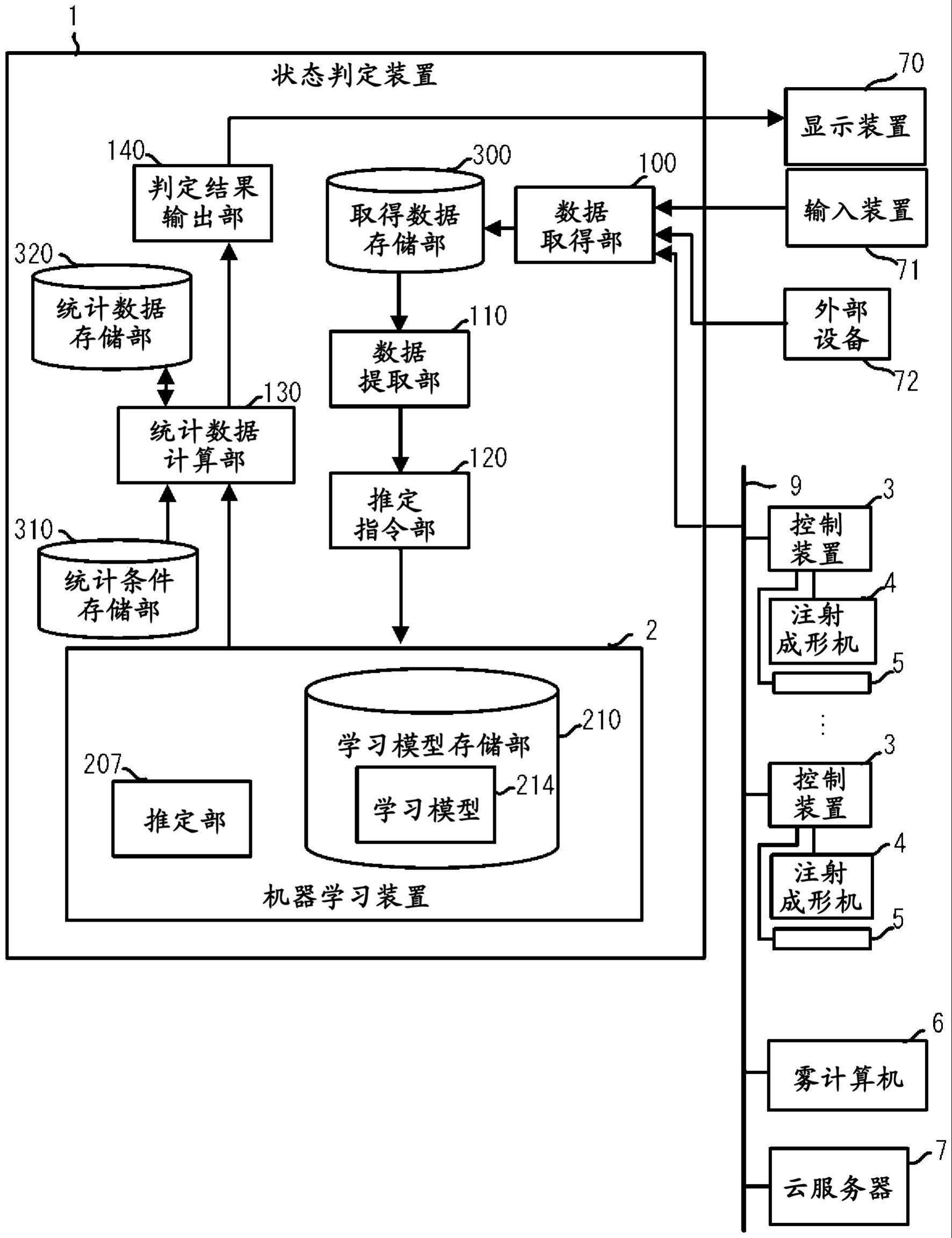
8、并且,本发明的一方式是判定工业机械的状态的状态判定装置,具有:数据取得部,其取得所述工业机械有关的数据;学习模型存储部,其存储学习了对应于工业机械有关的数据的该工业机械的动作状态的学习模型;推定部,其根据所述数据取得部从工业机械取得的数据,推定使用了存储在所述学习模型存储部中的学习模型的该工业机械的状态有关的推定值;统计条件存储部,其存储统计条件作为根据所述推定部推定出的多个推定值计算统计量的条件,该统计条件至少包含所述统计量的计算有关的统计函数和样本数;统计数据计算部,其按照存储在所述统计条件存储部中的统计条件计算统计量,计算使用计算出的所述统计量对基于所述推定部的推定值进行校正而得的统计推定值;以及判定结果输出部,其输出根据所述统计推定值判定所述工业机械的状态而得的结果,所述统计数据计算部计算根据在所述工业机械中产生的事件前由所述推定部推定出的推定值计算出的第一统计量以及根据在所述事件后由所述推定部推定出的推定值计算出的第二统计量,使用计算出的所述第一统计量以及所述第二统计量和预先决定的预定的校正函数,计算对在所述事件后由所述推定部推定出的推定值进行校正而得的统计推定值。
9、本发明的另一方式是一种判定工业机械的状态的状态判定方法,执行如下步骤:取得所述工业机械有关的数据的步骤;使用学习了对应于工业机械有关的数据的该工业机械的动作状态的学习模型,推定根据在所述取得的步骤中从工业机械取得的数据的该工业机械的状态有关的推定值的步骤;按照至少包含统计量的计算有关的统计函数和样本数的统计条件,根据多个所述推定值计算统计量,计算使用计算出的所述统计量校正所述推定值而得的统计推定值的步骤;以及输出根据所述统计推定值判定所述工业机械的状态而得的结果的步骤,在计算所述统计推定值的步骤中,计算根据在所述工业机械中产生的事件前在所述推定的步骤中推定出的推定值而计算出的第一统计量、和根据在所述事件后在所述推定的步骤中推定出的推定值而计算出的第二统计量,另外,使用计算出的所述第一统计量以及所述第二统计量和预先决定的预定的校正函数,计算对在所述事件后在所述推定的步骤中推定出的推定值进行校正而得的所述统计推定值。
10、发明效果
11、根据本发明的一方式,即使在产生了多种多样的运转状态、动作状态的变动的情况下,也能够通用地使用通过机器学习得到的1个学习模型的推定值,能够实现各种状态下的判定精度的提高和鲁棒性(稳健)的判定。
技术特征:
1.一种判定工业机械的状态的状态判定装置,其特征在于,
2.根据权利要求1所述的状态判定装置,其特征在于,
3.根据权利要求1所述的状态判定装置,其特征在于,
4.根据权利要求1所述的状态判定装置,其特征在于,
5.根据权利要求1所述的状态判定装置,其特征在于,
6.根据权利要求1所述的状态判定装置,其特征在于,
7.根据权利要求1所述的状态判定装置,其特征在于,
8.根据权利要求1所述的状态判定装置,其特征在于,
9.根据权利要求1所述的状态判定装置,其特征在于,
10.根据权利要求1所述的状态判定装置,其特征在于,
11.一种判定工业机械的状态的状态判定方法,其特征在于,
技术总结
状态判定装置具有:数据取得部,其取得工业机械有关的数据;推定部,其根据取得的数据来进行使用了学习模型的推定;以及统计数据计算部,其按照预定的统计条件来计算统计量,计算使用计算出的统计量对所述推定部的推定值进行了校正的统计推定值,由此,能够使由学习模型计算出的状态判定结果适应于工业机械的运转状况等的变化。
技术研发人员:堀内淳史,浅冈裕泰,清水显次郎
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!