一种管口打磨机器人及其打磨方法与流程
本发明涉及打磨,具体为一种管口打磨机器人及其打磨方法。
背景技术:
1、众所周知,打磨是表面改性技术的一种,一般指借助粗糙物体来通过摩擦改变材料表面物理性能的一种加工方法,主要目的是为了获取特定表面粗糙度。
2、经检索,由中国专利网公开的公开号为cn106863059b的专利,公开了一种一种可以同时打磨钢管的管口内、外边毛刺的装置主要用于钢管的管口打磨并除去管口毛刺,它结构简单,可以同时打磨钢管的管口内、外边毛刺;本发明主要由圆盘、弧形打磨块、辐条、转轴组成;其主要工作原理及安装方法是:先根据钢管的直径,在圆盘上找到相应直径的刻度线,将四块弧形打磨块的v形槽的中心线对准刻度线,再安装固定四块弧形打磨块,然后将四块弧形打磨块的v形槽的中心线对准钢管的管口,启动转轴的驱动装置使转轴旋转,转轴带动圆盘及四块弧形打磨块旋转,四块弧形打磨块的v形槽的两个v形边同时打磨钢管管口的内、外边毛刺。
3、但是,上述专利的不足之处在于:虽然该专利实现了能够同时对管口内外毛刺进行打磨的功能,但在打磨装置实际使用过程中,大量生产的管道如果不能进行批量打磨,会导致管道的生产效率降低,从而不利于加工成本的降低,为此,我们提出一种管口打磨机器人及其打磨方法。
技术实现思路
1、本发明的目的在于提供一种管口打磨机器人及其打磨方法,以解决上述背景技术中提出的问题。
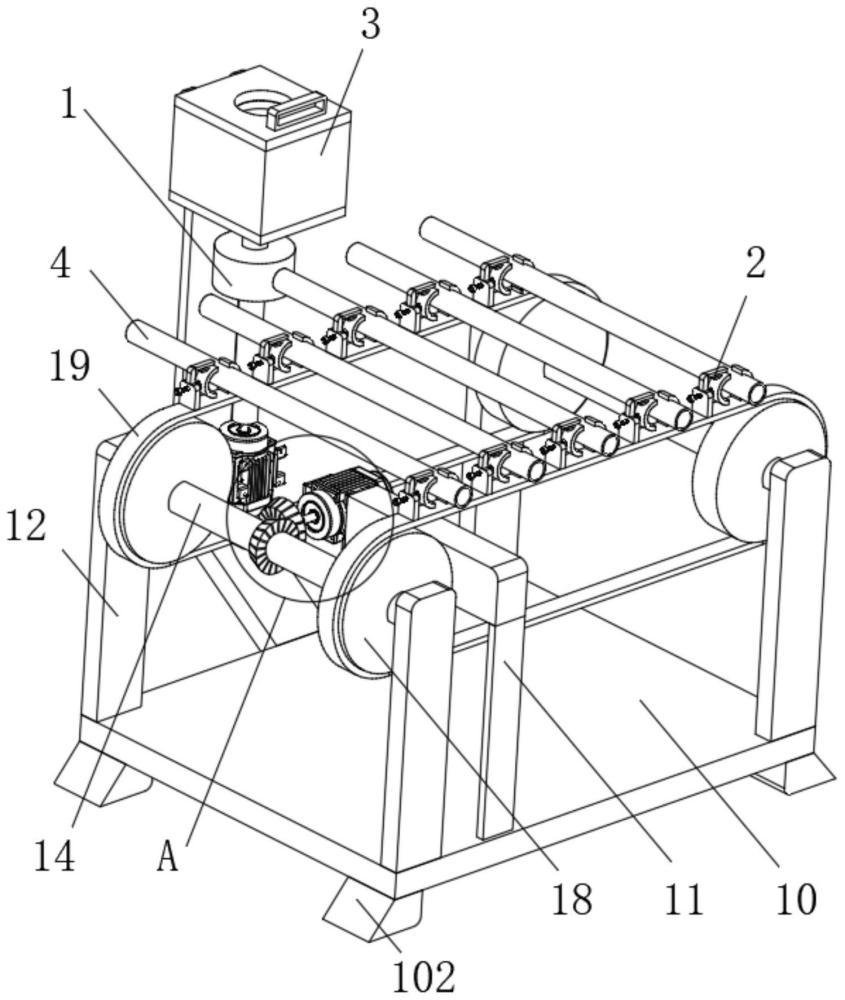
2、为实现上述目的,本发明提供如下技术方案:一种管口打磨机器人,包括:打磨机构和固定机构;
3、所述打磨机构包括底座和支架,所述底座的顶部分别固定安装有立板和支撑板,所述立板的一侧固定安装有第一电机,所述第一电机的输出轴固定连接有主动锥形齿轮,所述支撑板的一侧转动连接有杆体,所述支撑板的数量为四个,两个所述支撑板相邻的一侧转动连接有杆体,所述杆体上分别固定套装有转轮和从动锥形齿轮,所述从动锥形齿轮的外侧与主动锥形齿轮啮合连接,所述转轮上转动连接有皮带,所述支架固定连接在底座的顶部,所述支架的顶部固定安装有第二电机,所述第二电机的输出轴固定连接有主轴,所述主轴上固定套装有打磨辊;所述打磨机构的作用是能够对管道的端口进行打磨;
4、所述固定机构包括分别均匀固定连接在皮带上的连接板和连接块,所述连接块的一侧固定连接有固定夹块,所述连接板的内部螺纹连接有螺纹杆,所述螺纹杆的一端转动连接有活动夹块,所述活动夹块的一侧与连接板活动连接;所述固定机构的作用是使管道能够得到批量固定,进而便于对管道进行批量打磨。
5、通过采用上述技术方案,第一电机启动后能够通过主动锥形齿轮带动从动锥形齿轮转动,从而使杆体能够在从动锥形齿轮作用下带动转轮转动,使皮带能够进行来回转动,并且第二电机启动后能够通过主轴带动打磨辊转动;并且,当多个管道被依次放置在对应的固定夹块上后,能够通过拧紧螺纹杆的方式带动活动夹块向固定夹块靠近,从而使管道能够被固定夹块和活动夹块夹紧,并且也便于拆卸。
6、优选的,所述连接板的一侧固定连接有板体,所述板体的一侧开设有滑槽,所述滑槽的内侧壁滑动连接有滑块,所述滑块的一侧与活动夹块固定连接。
7、通过采用上述技术方案,能够使活动夹块不会随着螺纹杆的转动而转动,从而使活动夹块能够在螺纹杆作用下进行平移运动。
8、优选的,所述螺纹杆远离活动夹块的一端焊接有凸块。
9、通过采用上述技术方案,能够便于对螺纹杆进行拧紧或拧松。
10、优选的,所述凸块的一侧开设有插接槽。
11、通过采用上述技术方案,能够便于将扳手插入到凸块中对螺纹杆进行操作。
12、优选的,所述底座的底部固定连接有支腿,所述支腿的数量为四个。
13、通过采用上述技术方案,能够使底座被放置时更加平稳。
14、优选的,还包括除屑机构,所述除屑机构包括固定连接在支架顶部的底板,所述底板的顶部固定连接有箱体,所述底板的内部与主轴转动连接,所述主轴的一端延伸至箱体的内部且固定连接有活动杆,所述活动杆的外侧壁固定连接有转叶;所述除屑机构的作用是便于对打磨过程中产生的碎屑进行清理。
15、通过采用上述技术方案,主轴带动活动杆转动后,转叶能够在活动杆作用下旋转产生风力,从而使风力能够将打磨过程中产生的碎屑吹散。
16、优选的,所述箱体和底板的内部均开设有出气槽,所述箱体的顶部铰接有箱盖,所述箱盖的顶部固定连接有把手。
17、通过采用上述技术方案,风力能够从箱体内部吹出,并且箱体能够便于打开或关闭。
18、优选的,所述箱盖的内部开设有进气槽,所述进气槽的内侧壁固定连接有滤网。
19、通过采用上述技术方案,能够便于外部空气进入到箱体内部,并且能够避免灰尘进入到箱体内部。
20、一种管口打磨机器人打磨方法,包括以下步骤:
21、步骤一、将多个管道依次放置在对应的固定夹块的一侧上,并且使管道待打磨的一端处在靠近打磨辊的位置上;
22、步骤二、通过拧紧螺纹杆的方式带动活动夹块向固定夹块移动,使多个管道同时被活动夹块和固定夹块夹紧;
23、步骤三、启动第一电机,第一电机通过主动锥形齿轮带动从动锥形齿轮转动,使杆体在从动锥形齿轮作用下带动其中两个转轮转动,两个转轮在皮带作用下带动另外两个转轮转动,使皮带在第一电机作用下进行来回移动;
24、步骤四、启动第二电机,第二电机通过主轴带动打磨辊转动,使每个管道的端口与打磨辊产生接触时均能够受到打磨处理;
25、步骤五、活动杆在主轴带动下转动,转叶在活动杆作用下旋转产生风力,外部空气能够通过进气槽进入到箱体内部,再通过出气槽吹出,使管道在打磨过程中产生的碎屑被及时清理。
26、优选的,在步骤三中,第一电机为正反转电机,皮带能够在第一电机作用下通过固定机构带动管道进行来回移动,并且不会受到支撑板的阻挡。
27、与现有技术相比,本发明的有益效果是:
28、本发明通过在打磨机构上设置固定机构,使多个管道被依次放置在对应的固定夹块上后,通过拧紧螺纹杆的方式能够带动活动夹块将管道夹紧在固定夹块上,并且当第一电机带动主动锥形齿轮顺时针或逆时针转动后,皮带能够通过固定机构带动管道来回移动;通过以上设置,使管道能够批量性地受到打磨辊的打磨,有利于提升了生产效率以及降低生产成本。
技术特征:
1.一种管口打磨机器人,其特征在于,包括:打磨机构(1)和固定机构(2);
2.根据权利要求1所述的一种管口打磨机器人,其特征在于:所述连接板(20)的一侧固定连接有板体(25),所述板体(25)的一侧开设有滑槽(29),所述滑槽(29)的内侧壁滑动连接有滑块(26),所述滑块(26)的一侧与活动夹块(27)固定连接。
3.根据权利要求1所述的一种管口打磨机器人,其特征在于:所述螺纹杆(23)远离活动夹块(27)的一端焊接有凸块(28)。
4.根据权利要求3所述的一种管口打磨机器人,其特征在于:所述凸块(28)的一侧开设有插接槽(201)。
5.根据权利要求1所述的一种管口打磨机器人,其特征在于:所述底座(10)的底部固定连接有支腿(102),所述支腿(102)的数量为四个。
6.根据权利要求1所述的一种管口打磨机器人,其特征在于:还包括除屑机构(3),所述除屑机构(3)包括固定连接在支架(13)顶部的底板(30),所述底板(30)的顶部固定连接有箱体(31),所述底板(30)的内部与主轴(103)转动连接,所述主轴(103)的一端延伸至箱体(31)的内部且固定连接有活动杆(35),所述活动杆(35)的外侧壁固定连接有转叶(33)。
7.根据权利要求6所述的一种管口打磨机器人,其特征在于:所述箱体(31)和底板(30)的内部均开设有出气槽(34),所述箱体(31)的顶部铰接有箱盖(32),所述箱盖(32)的顶部固定连接有把手(38)。
8.根据权利要求7所述的一种管口打磨机器人,其特征在于:所述箱盖(32)的内部开设有进气槽(36),所述进气槽(36)的内侧壁固定连接有滤网(37)。
9.一种管口打磨机器人打磨方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的一种管口打磨机器人打磨方法,其特征在于:在步骤三中,第一电机(15)为正反转电机,皮带(19)能够在第一电机(15)作用下通过固定机构(2)带动管道(4)进行来回移动,并且不会受到支撑板(12)的阻挡。
技术总结
本发明公开了一种管口打磨机器人及其打磨方法,包括:打磨机构和固定机构;所述打磨机构包括底座和支架,所述底座的顶部分别固定安装有立板和支撑板,所述立板的一侧固定安装有第一电机,所述第一电机的输出轴固定连接有主动锥形齿轮,所述支撑板的一侧转动连接有杆体,所述支撑板的数量为四个;本发明通过在打磨机构上设置固定机构,使多个管道被依次放置在对应的固定夹块上后,通过拧紧螺纹杆的方式能够带动活动夹块将管道夹紧在固定夹块上,并且当第一电机带动主动锥形齿轮顺时针或逆时针转动后,皮带能够通过固定机构带动管道来回移动;通过以上设置,使管道能够批量性地受到打磨辊的打磨,有利于提升了生产效率以及降低生产成本。
技术研发人员:罗孝玉
受保护的技术使用者:昆山圣翰智能机械科技有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!