一种机器人光学加工的机器视觉定位系统及方法
本发明涉及光学加工工件定位,尤其涉及一种机器人光学加工的机器视觉定位系统及方法。
背景技术:
1、近年来随着机器人技术的成熟,越来越多的六自由度工业机器人被用于大口径中低加工精度的反射光学加工领域中,代替传统的数控机床作为运动执行机构;六自由度工业机器人相比于数控机床,其优势在于:设备成本低,有利于降低加工成本;设备自由度高,提高了加工工具的姿态的准确性,有利于面形误差的收敛;占地面积小、空间利用率高,有利于加工设备的批量化配置;现在工业机器人主要与小磨头加工技术、气囊加工技术等光学加工技术相结合,这已经成为了光学加工领域对机器人的主要应用方式。
2、机器视觉定位技术也逐渐完善,普遍用于元件缺陷定位、特征捕捉等面向工件检测的应用中,也有抓取点聚焦、路径规划等面向工具操作的应用中,还有辅助协同等多任务定位应用;近年来随着机器学习技术的发展,还衍生了机器人通过机器视觉获取信息进行训练模型得到自主决策的技术,自行定位元件。
3、机器人对光学元件加工前,需要对光学元件的位置进行标定,建立光学加工平台3坐标系{w}与机器人1工具坐标系{c}的转换关系,使得机器人清晰地知晓光学元件的位置;目前,对光学元件位置的标定主要采用接触式反复测量的“红宝石探针法”,该方法需要多次测量取平均,这影响加工时光学元件位置的准确性,并且该方法测量周期长、潜在损伤元件的风险。
技术实现思路
1、本发明的目的是针对机器人加工中的光学元件高精度标定,将机器人加工与机器视觉定位技术结合,提供一种机器人光学加工的机器视觉定位系统及方法,有解决上述现有技术中存在的技术问题。
2、为实现上述目的,首先,本发明提供了一种机器人光学加工的机器视觉定位系统,具体技术方案如下:
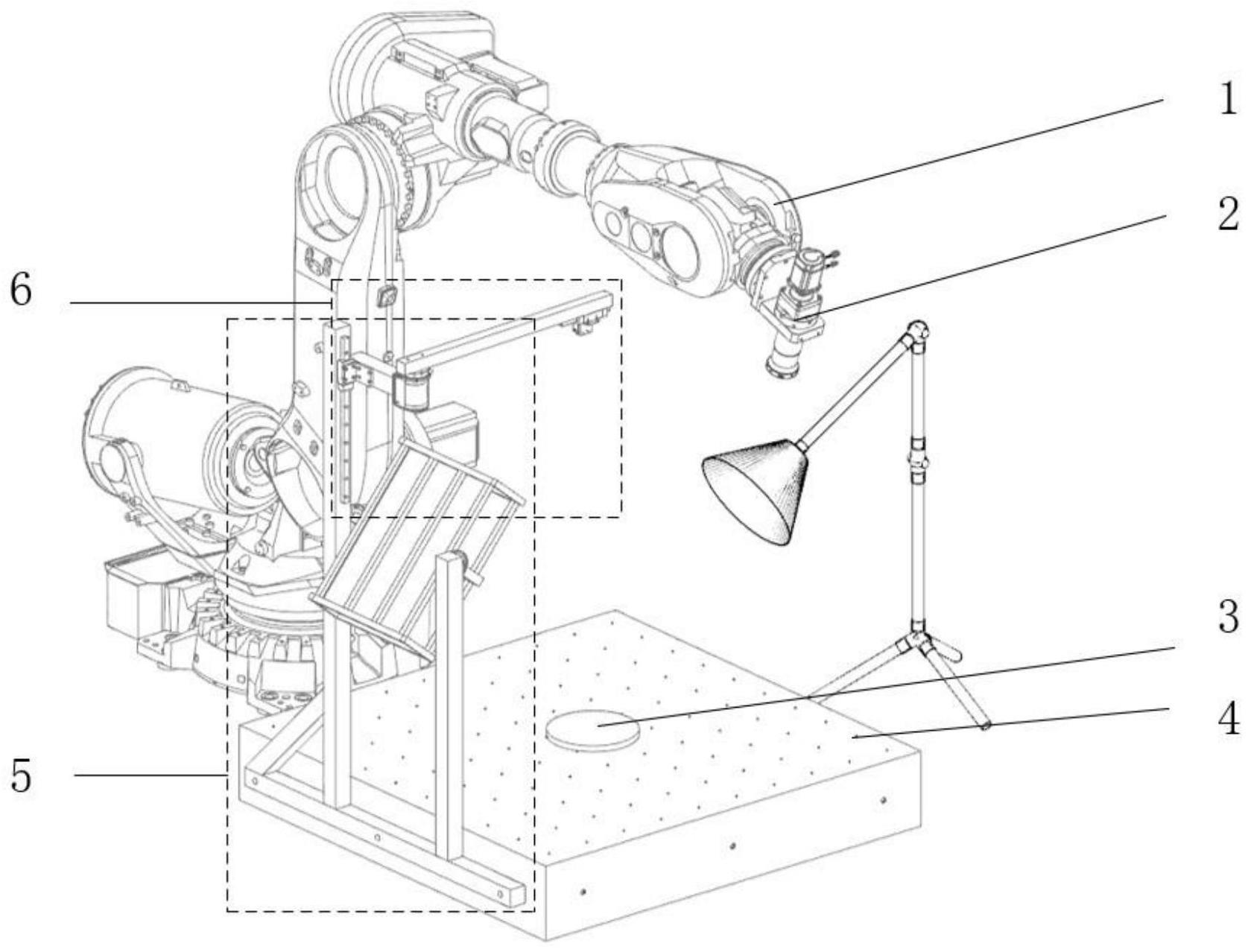
3、该定位系统包括:机器人、小磨头加工模块、光学加工平台和光学元件,所述机器人布置在所述光学加工平台一侧,所述小磨头加工模块安装在所述机器人的输出端,用于对布置在光学加工平台上的光学元件进行光学加工;
4、该定位系统还包括机器视觉模块,所述机器视觉模块包括基本支架,所述基本支架固定在所述光学加工平台侧面,包括:相机支架和光源支架,所述相机支架上连接有相机,用于对相机拍摄区域进行调节,所述光源支架上连接有光源,用于对光源照射区域进行调节;
5、该定位系统还包括:补光光源,所述补光光源布置在光学加工平台侧面,且相对于光学元件,补光光源放置在光源的对侧。
6、进一步的,所述相机支架包括:支架本体,所述支架本体垂直连接在光学加工平台侧面,所述支架本体上设有升降机构,所述升降机构下连接有锁紧机构,所述升降机构上连接有连接杆一端,所述连接杆另一端连接有旋转机构,所述旋转机构上连接有旋转锁紧机构和复位机构,所述旋转机构上方连接有另一连接杆,该连接杆下方设有横向平移机构和横向锁紧机构,所述横向平移机构下方连接有相机。
7、进一步的,所述光源支架包括:方形框架和活动组件支架,所述方形框架两侧分别通过活动组件连接在活动组件支架和支架本体上,所述活动组件支架垂直连接在光学加工平台侧面与支架本体平行设置,所述活动组件包括:俯仰机构和俯仰锁紧机构,所述方形框架底部设有均光板,所述方形框架内部设有光源,所述光源上方覆有偏振片。
8、另外,本发明还提供了一种机器人光学加工的机器视觉定位方法,该方法包括以下步骤:
9、步骤1:搭建机器视觉系统;
10、按照权利要求1-3中所述机器人光学加工的机器视觉定位系统的连接关系搭建机器视觉系统,通过调整俯仰机构使得光源照射光学加工平台的加工区域获得均匀亮度,完成后调整俯仰锁紧机构使光源固定;将相机架设在相机支架的末端,调整相机支架的旋转机构以及横向平移机构使相机对准光学加工平台的中心,然后调整旋转锁紧机构以及横向锁紧机构使相机固定,并且将复位机构的不动点设置于此位置;
11、步骤2:进行相机标定;
12、运用张正友标定法,采用大于1/3相机视场但不超过全视场的、棋盘格子尺寸至少为三倍相机的工作线视场长度、单边不少于5格的标定板,放置在光学加工平台上进行多位置多角度的图像采集至少20幅图像;将采集到的图像导入matlab的标定工具箱,输出得到相机坐标系{c}的内部参数和外部参数,并且由此得到相机坐标系{c}与光学加工平台坐标系{w}的传递矩阵;
13、步骤3:进行手眼标定;
14、运用九点标定法,操作示教器令机器人到达光学加工平台上至少9个定位孔的位置,并记录机器人示教器上的位置信息,然后运用已经标定好的相机对光学加工平台上的定位孔区域进行拍摄,并保存图像;对获取的图像进行图像处理,采用中值滤波方法降低图像噪声,采用灰度增强法提升图像的对比度,采用blob算法进行边缘探测,采用几何形心法获取图像中定位孔图像坐标,并记录;将上述记录的机器人示教器中的定位孔位置与相机拍摄经过图像处理得到的图像中定位孔的位置,采用九点手眼标定法进行机器人坐标系{r}与相机坐标系{c}之间手眼矩阵的解算;
15、步骤4:进行光学元件定位;
16、在光学加工平台上摆放光学元件,关闭环境光源,开启光源,打开相机,在上位机上观察拍摄区域图像质量,移动补光光源进行图像消影,待上位机中的图像中只存在光学元件时即可停止;并对光学元件进行拍摄图像,对获取的光学元件的图像采用灰度增强法提升图像的对比度,采用blob算法进行背景分割并得到连通区域,获得只含有光学元件轮廓的前景图像;利用中值滤波法、傅里叶-高斯滤波法、haar滤波法等方法进行图像噪声抑制,此时由于光学元件镜面反射像在图像区域会呈现出杂质形状,光学元件的边缘也会因blob算法缺陷导致残缺,对此需要针对元件特征进行开运算,使得光学元件以外的接连区域变得孤立,再根据形状阈值将过小的连通区域进行删除,只留下残缺的光学元件的残缺轮廓;此时对于轮廓残缺处进行轮廓局部生长将原轮廓进一步补全,再进行闭运算使得轮廓外延张成光学元件的平面投影;再进行边缘提取采用霍夫变换法、sift特征提取法、dog差分法等算法获取图像中光学元件的清晰轮廓,采用matlab的regionprops方法获取轮廓信息,并计算光学元件的形心,经过步骤二中获得的相机坐标系{c}与光学加工平台坐标系{w}的传递矩阵,得知光学元件在光学加工平台坐标系{w}中的位置,经过步骤三获得的手眼矩阵计算机器人坐标系{r},得知光学元件在机器人坐标系{r}中的位置;从而实现基于机器人的光学加工机器视觉投影平面形心定位,以投影平面形心为特征点寻找其他加工点,完成平面定位。
17、本发明的有益效果
18、与现有技术相比,本发明通过机器视觉的定位方法,利用自主设计的支架实现了集成式机器视觉模块,完成了快速准确非接触式的大口径光学元件的定位;解决了光学加工中对大口径光学元件定位时间长、定位方法对镜面有损伤的问题,实现了快速无损伤的大口径光学元件定位。
技术特征:
1.一种机器人光学加工的机器视觉定位系统,其特征在于,该定位系统包括:机器人(1)、小磨头加工模块(2)、光学加工平台(3)和光学元件(4),所述机器人(1)布置在所述光学加工平台(3)一侧,所述小磨头加工模块(2)安装在所述机器人(1)的输出端,用于对布置在光学加工平台(3)上的光学元件(4)进行光学加工;
2.根据权利要求1所述的一种机器人光学加工的机器视觉定位系统,其特征在于,所述相机支架(6)包括:支架本体(61),所述支架本体(61)垂直连接在光学加工平台(3)侧面,所述支架本体(61)上设有升降机构(8),所述升降机构(8)下连接有锁紧机构(9),所述升降机构(8)上连接有连接杆(62)一端,所述连接杆(62)另一端连接有旋转机构(10),所述旋转机构(10)上连接有旋转锁紧机构(11)和复位机构(12),所述旋转机构(10)上方连接有另一连接杆(62),该连接杆(62)下方设有横向平移机构(13)和横向锁紧机构(14),所述横向平移机构(13)下方连接有相机(15)。
3.根据权利要求2所述的一种机器人光学加工的机器视觉定位系统,其特征在于,所述光源支架(7)包括:方形框架(71)和活动组件支架(72),所述方形框架(71)两侧分别通过活动组件连接在活动组件支架(72)和支架本体(61)上,所述活动组件支架(72)垂直连接在光学加工平台(3)侧面与支架本体(61)平行设置,所述活动组件包括:俯仰机构(16)和俯仰锁紧机构(17),所述方形框架(71)底部设有均光板(18),所述方形框架(71)内部设有光源(20),所述光源(20)上方覆有偏振片(19)。
4.一种机器人光学加工的机器视觉定位方法,其特征在于,该定位方法包括以下步骤:
技术总结
本发明公开了一种机器人光学加工的机器视觉定位系统及方法,属于光学加工工件定位技术领域。该定位系统包括:机器人、小磨头加工模块、光学加工平台、光学元件以及机器视觉模块。所述机器人布置在所述光学加工平台一侧,所述小磨头加工模块安装在机器人的输出端,用于对布置在光学加工平台上的所述光学元件进行加工;所述机器视觉模块的基本支架集成在光学加工平台侧面,相机与光源集成于基本支架上,补光光源布置在光学加工平台另一侧面。该定位系统使用光源和补光光源以消除杂光对图像的影响,经相机摄取图像处理得光学元件图像坐标,再经手眼传递矩阵得光学元件工具坐标。实现了快速准确非接触式光学元件定位,减少了工程周期,且具有重复性。
技术研发人员:李龙响,刘夕铭,李兴昶,张峰,张学军
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!