一种环保型鞋帮打磨机器人及自动打磨方法与流程
本发明涉及制鞋,具体为一种环保型鞋帮打磨机器人及自动打磨方法。
背景技术:
1、在皮鞋制鞋过程中,为了提高鞋帮表面的粘合性,通常在鞋帮贴合之前,将鞋帮贴合面的皮革或印刷涂层进行打磨处理,增大喷射鞋帮下部粗糙度,以增大其粘合力。
2、在现有专利:cn216327288u一种鞋帮打磨机械手中,包括:机械臂和打磨装置,打磨装置包括:动力机构、伸缩机构、打磨装置本体和打磨头,打磨装置本体置于机械臂上,动力机构通过转轴设置于打磨装置本体上,打磨头置于动力机构的输出端上,且动力机构用于驱动打磨头转动,伸缩机构的一端与打磨装置本体连接,另一端与所述动力机构外壁连接,所述伸缩机构用于驱动所述动力机构绕转轴转动。其中,该发明的机械臂和打磨装置直接通过转轴连接,且鞋楦的位置无法根据实际需求进行调节,并且不能适应不同大小的被打磨鞋,为了提高打磨效率以及方便机械臂和打磨装置直接的拆卸和安装,我们提供了一种环保型鞋帮打磨机器人及自动打磨方法解决以上问题。
技术实现思路
1、本发明的目的在于提供一种环保型鞋帮打磨机器人及自动打磨方法,以解决上述背景技术中提出的问题。
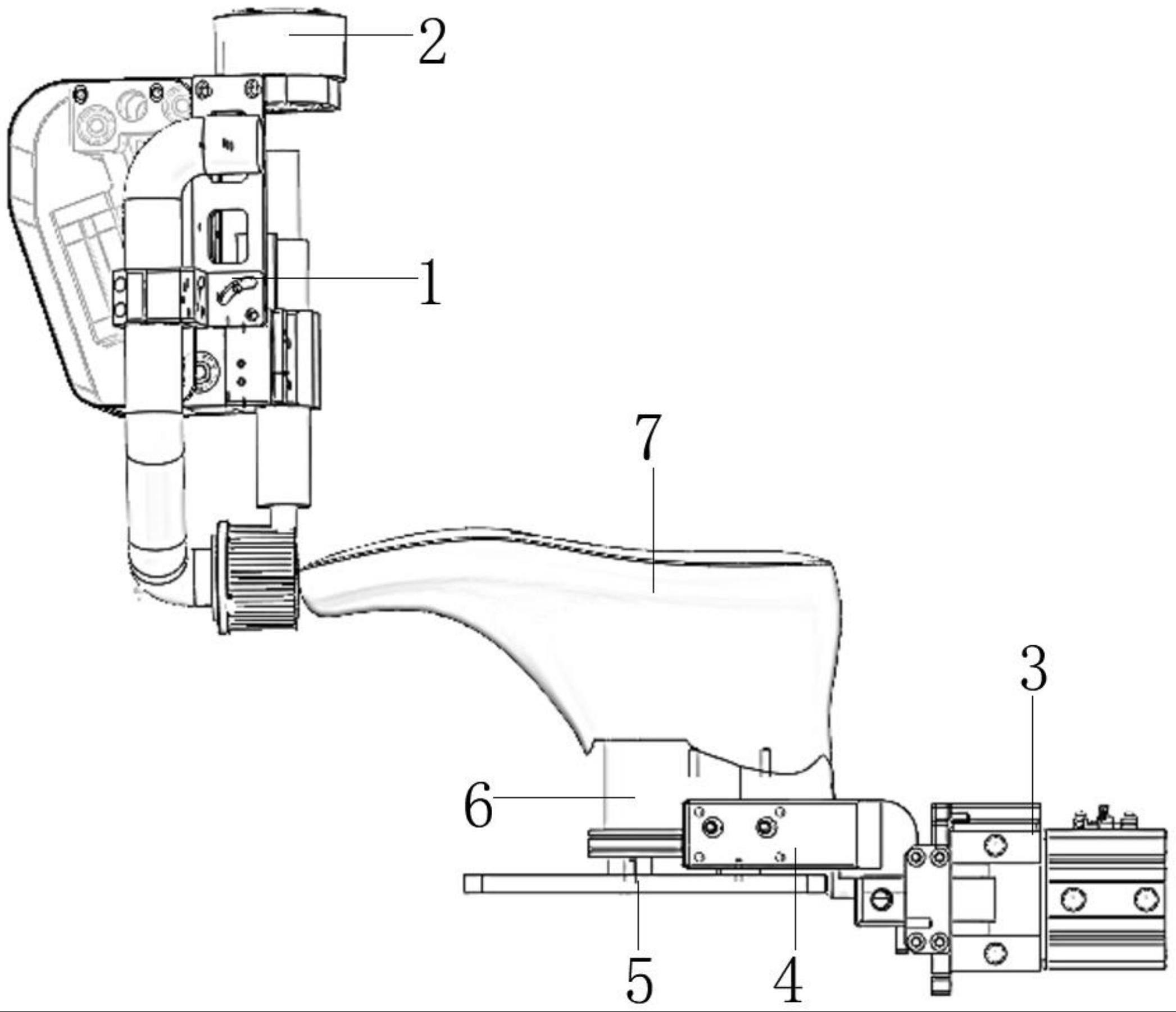
2、为实现上述目的,本发明提供如下技术方案:包包括:机器人自动打磨头和工作台,机器人自动打磨头顶部安装有用于与机械手连接的锁紧组件,工作台右侧安装有直线电机,且直线电机输出端安装有夹紧组件,工作台顶部活动设有鞋楦,直线电机通过夹紧组件推动鞋楦沿工作台台面进行移动。
3、优选的,机器人自动打磨头包括:安装支架,透明防尘罩通过转动轴一与安装支架顶部且位于右侧的一端转动连接,缓冲气缸通过转动轴二与安装支架顶部且位于右侧的一端转动连接,主轴固定架顶部通过三组转动轴三与安装支架转动连接。
4、优选的,缓冲气缸输出轴与主轴固定架右侧外壁固定连接,主轴固定架左侧外壁设有安装环套,旋转主轴套设于安装环套内,旋转主轴输出端安装有打磨头。
5、优选的,安装支架后侧安装有吸尘管道,且吸尘管道的入口处安装有吸尘头,吸尘管道的出口处与任意吸尘装置连接。
6、优选的,安装环套前侧外壁固定连接有气泵,气泵输出端与气管连通,且气管远离气泵的一端朝向打磨头。
7、优选的,锁紧组件包括:安装环套、固定环套、驱动电机、连接轴和锁紧单元,安装环套底部固定连接于安装支架顶部,安装环套内壁底部安装有驱动电机,且驱动电机输出端固定连接有连接轴,连接轴外壁等间距排列设置若干组锁紧单元,环绕固定环套外壁贯穿设置与若干组锁紧单元数量相同的锁紧槽,固定环套顶部无盖板,且固定环套底部与机械手的腕部固定连接,固定环套顶部活动插入安装环套内并与若干组锁紧单元相配合使用。
8、优选的,锁紧单元包括:转动盘,转动盘固定套接于连接轴外壁,转动盘四角处均活动安装有第一转轴,第二转轴和第三转轴对称设于连接块顶部,且第二转轴和第三转轴固定贯穿连接块并延伸至连接块底部,第一连杆一端与第一转轴顶部转动连接,第一连杆另一端与第二转轴顶部转动连接,第二连杆一端与第一转轴底部转动连接,第二连杆另一端与第三转轴底部转动连接,第一连接弹簧两端分别与连接块和第一连杆固定连接,固定块靠近连接块的一侧与连接块固定连接,且相邻的两组固定块之间固定连接有第二连接弹簧,止锁块靠近固定块的一侧与固定块固定连接。
9、优选的,夹紧组件包括:固定底座,固定底座右端与直线电机输出端固定连接,固定底座前左固定安装有驱动气缸,驱动气缸输出轴端头处固定连接有第四转轴,固定底座左端上下两侧对称固定设有两组第一固定杆,滑动杆与第一固定杆固定连接,且滑动杆外壁滑动套接有滑动套,第五转轴和第六转轴固定安装于滑动套外壁,l型连杆靠近第四转轴的一端与第四转轴转动连接,l型连杆靠近第五转轴的一端与第五转轴转动连接,l型连杆靠近第七转轴的一端与第七转轴转动连接,第三连杆靠近第六转轴的一端与第六转轴转动连接,第三连杆远离第六转轴的一端与第七转轴固定连接,固定夹爪靠近第七转轴的一端与第七转轴固定连接,且两组固定夹爪内设有相同的压力单元。
10、优选的,压力单元包括:安装腔一和安装腔二,固定夹爪内设有两组安装腔一和一组安装腔二,且两组安装腔一以安装腔二为对称中心设置,第一缓冲弹簧设于安装腔一内,且第一缓冲弹簧两端分别与安装腔一内壁和第一弹力杆固定连接,第一弹力杆远离第一缓冲弹簧的一端固定连接有压力传感器,安装腔二内安装有微型气泵,两组固定夹爪相互靠近的一侧均设由压力保护层,且压力保护层与固定夹爪外壁之间留有空腔,第一缓冲气囊设于该空腔内,且第一缓冲气囊与微型气泵连通,压力保护层外壁等间距设有若干摩擦垫片,且相邻的摩擦垫片之间固定设有第一橡胶垫片。
11、本发明还提供了一种自动打磨方法,用于控制上述的一种环保型鞋帮打磨机器人进行打磨,所打磨方法包括:
12、步骤1:将待打磨鞋套在鞋楦上,启动直线电机将鞋楦沿工作台台面进行推动移动到靠近打磨头;
13、步骤2:缓冲气缸把旋转主轴推至竖直,使得打磨头抵接到要打磨的地方;
14、步骤3:旋转主轴启动,打磨头开始旋转并在鞋帮表面进行打磨;
15、步骤4:打磨结束后,缓冲气缸复位并使得旋转主轴倾斜,打磨头离开待打磨鞋的鞋帮;
16、步骤5:直线电机启动将鞋楦沿工作台台面进行移动并复位后,将待打磨鞋从鞋楦上取下。
17、与现有技术相比,本发明的有益效果是:
18、通过锁紧组件的设置便于机器人自动打磨头与四轴\六轴机械手的输出端灵活拆卸和安装,避免了通过法兰盘进行连接时,反复拧紧\放松螺栓时浪费时间,降低工作效率,通过夹紧组件的设置可以方便更换不同鞋型的鞋楦,提高了待打磨鞋的适配率,通过该环保型鞋帮打磨机器人的设计可以提高鞋帮的打磨效率,使得打磨过程更加均匀,打磨过程变得简便。
技术特征:
1.一种环保型鞋帮打磨机器人,包括:机器人自动打磨头(1)和工作台(5),其特征在于:
2.根据权利要求1所述的一种环保型鞋帮打磨机器人,其特征在于:
3.根据权利要求2所述的一种环保型鞋帮打磨机器人,其特征在于:
4.根据权利要求2所述的一种环保型鞋帮打磨机器人,其特征在于:
5.根据权利要求3所述的一种环保型鞋帮打磨机器人,其特征在于:
6.根据权利要求2所述的一种环保型鞋帮打磨机器人,其特征在于:
7.根据权利要求6所述的一种环保型鞋帮打磨机器人,其特征在于:
8.根据权利要求1所述的一种环保型鞋帮打磨机器人,其特征在于:
9.根据权利要求8所述的一种环保型鞋帮打磨机器人,其特征在于:
10.一种自动打磨方法,用于控制如权利要求1-9中任一项所述的一种环保型鞋帮打磨机器人进行打磨,其特征在于,所打磨方法包括:
技术总结
本发明公开了一种环保型鞋帮打磨机器人及自动打磨方法,涉及制鞋技术领域,包括:机器人自动打磨头和工作台,机器人自动打磨头顶部安装有用于与机械手连接的锁紧组件,工作台右侧安装有直线电机,且直线电机输出端安装有夹紧组件,工作台顶部活动设有鞋楦,直线电机通过夹紧组件推动鞋楦沿工作台台面进行移动。通过锁紧组件的设置便于机器人自动打磨头与六轴机械手的输出端灵活拆卸和安装,避免了通过法兰盘进行连接时,反复拧紧\放松螺栓时浪费时间,降低工作效率,通过夹紧组件的设置可以方便更换不同鞋型的鞋楦,提高了待打磨鞋的适配率,通过该环保型鞋帮打磨机器人的设计可以提高鞋帮的打磨效率,使得打磨过程更加均匀,打磨过程变得简便。
技术研发人员:肖翔宇,肖祥鹏
受保护的技术使用者:广东腾誉龙自动化设备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!