基于柔性触觉传感器的表面打磨质量评估方法与流程
本发明属于工业机器人自动化加工和柔性传感器,具体为基于柔性触觉传感器的表面打磨质量评估方法。
背景技术:
1、工业机器人逐渐出现在磨削加工等领域,相较于传统的人力打磨和cnc数控打磨,其具有加工灵活性大、可协同加工、优势价格、效率高等特点,因而成为了提升加工零件表面质量的重要工艺。
2、但同时机器人磨削技术的发展面临着两大主要问题:一是解决小尺度复杂曲面的精密加工问题;二是大规模复杂结构的加工效率问题。其加工精度较cnc有着不小的差距,目前关于机器人磨削领域的研究主要集中于机器人加工的高精度在线测量、磨削余量控制、恒力控制等方面,研究人员旨在构建一个完整的“测量-操作-加工”机器人打磨体系。目前针对打磨后工件表面质量的检测方法主要集中于人工检测和机器视觉,肉眼观察效率低,机器视觉精度有待提高。如何设计一种自动化程度高且高精度的打磨表面质量检测方法,是工业机器人打磨领域面临的技术挑战。
3、本发明针对这一问题,提出一种通过柔性触觉传感器获取工件表面质量参数进而提升机器人打磨加工精度的方法。
技术实现思路
1、本发明的目的在于:为了解决上述提出的问题,提供基于柔性触觉传感器的表面打磨质量评估方法。
2、本发明采用的技术方案如下:基于柔性触觉传感器的表面打磨质量评估方法,所述基于柔性触觉传感器的表面打磨质量评估方法包括以下步骤:
3、s1:将柔性触觉传感器置于机械臂末端执行器;
4、s2:按照事先打磨工件时生成的路径运行柔性触手;
5、s3:柔性触觉传感器随着规划路径与工件实时接触,获取工件表面位置等信息;
6、s4:定位信息导入pc端,建立表面形貌模型;
7、s5:通过表面形貌特征表征表面质量;
8、s6:通过对比表面质量评估值与质量阈值判断是否合格,标定不合格点;
9、s7:优化路径,对不合格点进行二次打磨,之后结束整个流程。
10、在一优选的实施方式中,所述步骤s1中,针对不同材质、不同形状的工件,其打磨路径、打磨工具、工艺参数各异,需选择满足检测精度的柔性触觉传感器与机械臂末端执行器进行配置。
11、在一优选的实施方式中,所述步骤s2中,按照事先打磨路径驱动柔性触手需取其中几个点,测试接触点接触力、接触角度,通过调整优化路径使接触充分,完整精确地获得表面信息。
12、在一优选的实施方式中,所述步骤s3中,柔性触觉传感器通过自身微小的各个传感元接触工件表面,通过连接每个传感元的信号处理单元传递接触位置信息,通过信号线确定定位编码。
13、在一优选的实施方式中,所述步骤s4中,将所述柔性传感器紧密连续的贴在被测工件表面,建立起监测对象表面位置坐标系与柔性触觉传感器分布传感元的映射,从而将所监测的触觉信息与被测工件表面坐标相对应,经过数据处理复现表面形貌。
14、在一优选的实施方式中,所述步骤s5中,采集部分上述步骤s4中获取的表面形貌信息:位置和力等,构建评估表面质量算法网络,算法包含打磨质量判定、缺陷位置标定,获取足以表征打磨表面工艺特性的参数,进而评估表面质量。
15、在一优选的实施方式中,所述步骤s6中,在使用柔性传感器表征表面质量之前,需根据传统打磨工艺要求参数对标机器人打磨表面质量设定质量监测阈值,区分合格与不合格打磨区域,标定不合格点范围。
16、在一优选的实施方式中,所述步骤s6中,针对上述步骤s5中获取的表面质量信息,建立历史检测缺陷数据库,根据所述历史检测缺陷数据构建训练测试集,训练测试集包含打磨件参数信息和评估结果。
17、在一优选的实施方式中,所述步骤s7中,针对上述步骤s6中出现的打磨缺陷重新规划打磨路径,将加工轨迹导出成机器人运行指令程序,导入机械臂控制柜对工件进行二次打磨使标定位置区域满足工艺要求。
18、综上所述,由于采用了上述技术方案,本发明的有益效果是:
19、本发明中,在对打磨工件进行打磨时,可以针对上出现的打磨缺陷重新规划打磨路径,将加工轨迹导出成机器人运行指令程序,导入机械臂控制柜对工件进行二次打磨使标定位置区域满足工艺要求提升了传统打磨表面质量监测的精度和效率,可以应用于打磨工艺的质量检测阶段从而提升工件的工艺参数,从而提高了后续打磨工件的表面质量,提高了良品率,提升了产品质量。
技术特征:
1.基于柔性触觉传感器的表面打磨质量评估方法,其特征在于:所述基于柔性触觉传感器的表面打磨质量评估方法包括以下步骤:
2.如权利要求1所述的基于柔性触觉传感器的表面打磨质量评估方法,其特征在于:所述步骤s1中,针对不同材质、不同形状的工件,其打磨路径、打磨工具、工艺参数各异,需选择满足检测精度的柔性触觉传感器与机械臂末端执行器进行配置。
3.如权利要求1所述的基于柔性触觉传感器的表面打磨质量评估方法,其特征在于:所述步骤s2中,按照事先打磨路径驱动柔性触手需取其中几个点,测试接触点接触力、接触角度,通过调整优化路径使接触充分,完整精确地获得表面信息。
4.如权利要求1所述的基于柔性触觉传感器的表面打磨质量评估方法,其特征在于:所述步骤s3中,柔性触觉传感器通过自身微小的各个传感元接触工件表面,通过连接每个传感元的信号处理单元传递接触位置信息,通过信号线确定定位编码。
5.如权利要求1所述的基于柔性触觉传感器的表面打磨质量评估方法,其特征在于:所述步骤s4中,将所述柔性传感器紧密连续的贴在被测工件表面,建立起监测对象表面位置坐标系与柔性触觉传感器分布传感元的映射,从而将所监测的触觉信息与被测工件表面坐标相对应,经过数据处理复现表面形貌。
6.如权利要求1所述的基于柔性触觉传感器的表面打磨质量评估方法,其特征在于:所述步骤s5中,采集部分上述步骤s4中获取的表面形貌信息:位置和力等,构建评估表面质量算法网络,算法包含打磨质量判定、缺陷位置标定,获取足以表征打磨表面工艺特性的参数,进而评估表面质量。
7.如权利要求1所述的基于柔性触觉传感器的表面打磨质量评估方法,其特征在于:所述步骤s6中,在使用柔性传感器表征表面质量之前,需根据传统打磨工艺要求参数对标机器人打磨表面质量设定质量监测阈值,区分合格与不合格打磨区域,标定不合格点范围。
8.如权利要求1所述的基于柔性触觉传感器的表面打磨质量评估方法,其特征在于:所述步骤s6中,针对上述步骤s5中获取的表面质量信息,建立历史检测缺陷数据库,根据所述历史检测缺陷数据构建训练测试集,训练测试集包含打磨件参数信息和评估结果。
9.如权利要求1所述的基于柔性触觉传感器的表面打磨质量评估方法,其特征在于:所述步骤s7中,针对上述步骤s6中出现的打磨缺陷重新规划打磨路径,将加工轨迹导出成机器人运行指令程序,导入机械臂控制柜对工件进行二次打磨使标定位置区域满足工艺要求。
技术总结
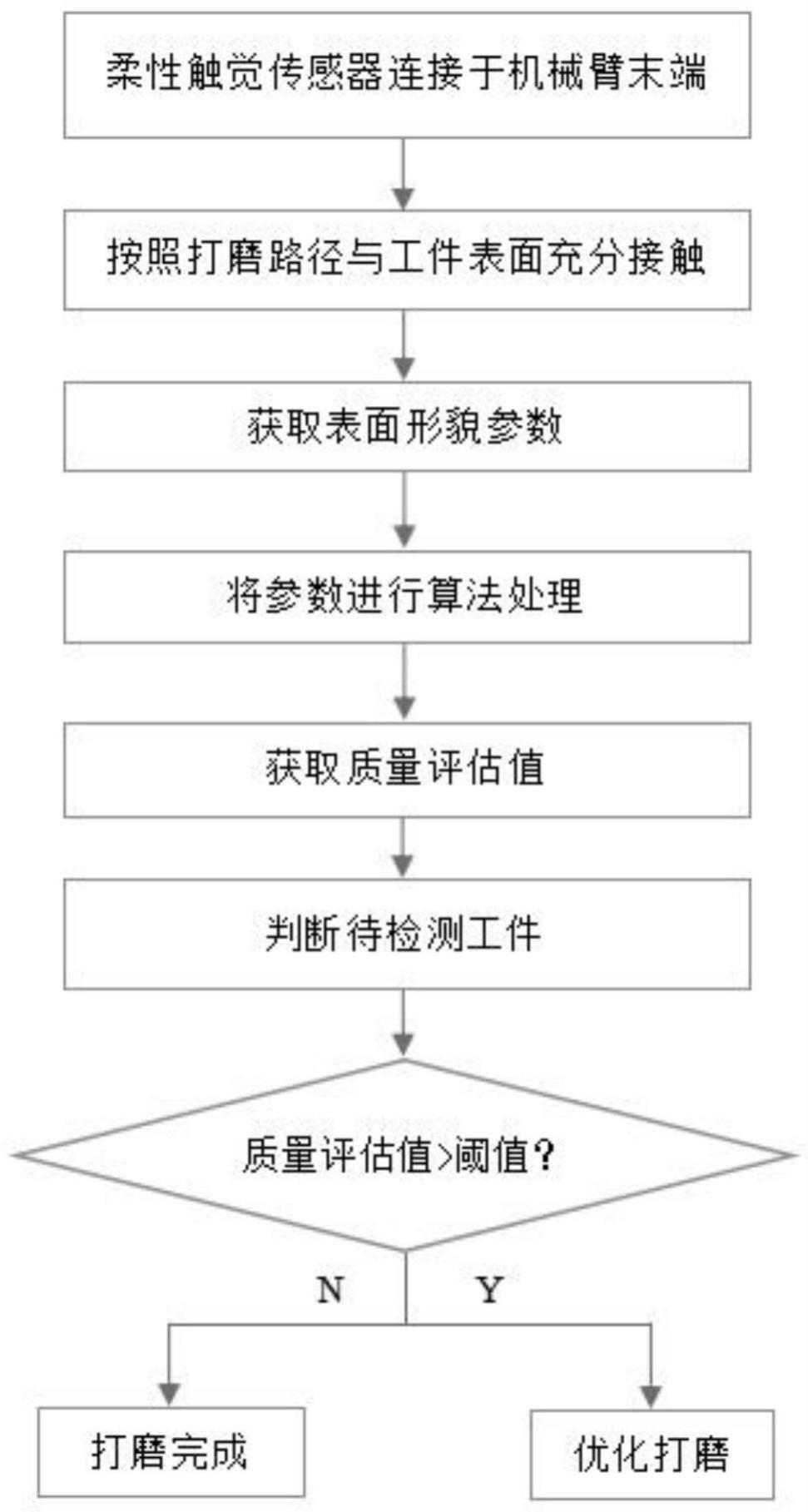
本发明公开了基于柔性触觉传感器的表面打磨质量评估方法。本发明中,质量评估方法的过程是,柔性触觉传感器连接在机械臂末端,使其按照打磨路径与打磨件充分接触,柔性触觉传感器在沿路径行走过程中获取参数,经过一系列算法处理,进而表征打磨件表面质量,对于质量评估值不达标的坐标点进行二次处理,直至全表面满足要求。这套系统能够精准定位工件表面打磨质量不达标处并进行优化,与打磨相互配合,对提高打磨质量与效率至关重要,导入机械臂控制柜对工件进行二次打磨使标定位置区域满足工艺要求提升了传统打磨表面质量监测的精度和效率,可以应用于打磨工艺的质量检测阶段从而提升工件的工艺参数,从而提高了后续打磨工件的表面质量。
技术研发人员:李振海,李东亚
受保护的技术使用者:无锡斯帝尔科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!