一种用于脚手架杆件的清洁装置的制作方法
本发明涉及建筑施工,尤其涉及一种用于脚手架杆件的清洁装置。
背景技术:
1、承插型盘扣式脚手架有着高刚度、强度、承载力、稳定性以及模块化、工具化作业的特点,正在国内多个城市得到推广。但由于如今的建设工程中使用的混凝土强度逐渐升至c35以上,即达到高强度混凝土范畴,而在周转过程中需要将表面粘接的混凝土清除才能满足下一次的安全使用,故对盘扣式脚手架杆件的回收清洗提出了不小的挑战。
2、目前,承插型盘扣式脚手架杆件的清洗通常采用人工敲铲的方式,且清洗过程需配合自制铲刀、铁锤进行。但是随着混凝土强度的提高,传统人工清洗方式在达到清洗需求的情况下时间、人工成本都有所上升。虽然也出现了针对脚手架的清洗装置,但多采用大量水流冲洗的方式,造成了水资源的浪费。
技术实现思路
1、本发明提供一种用于脚手架杆件的清洁装置,以解决上述技术问题。
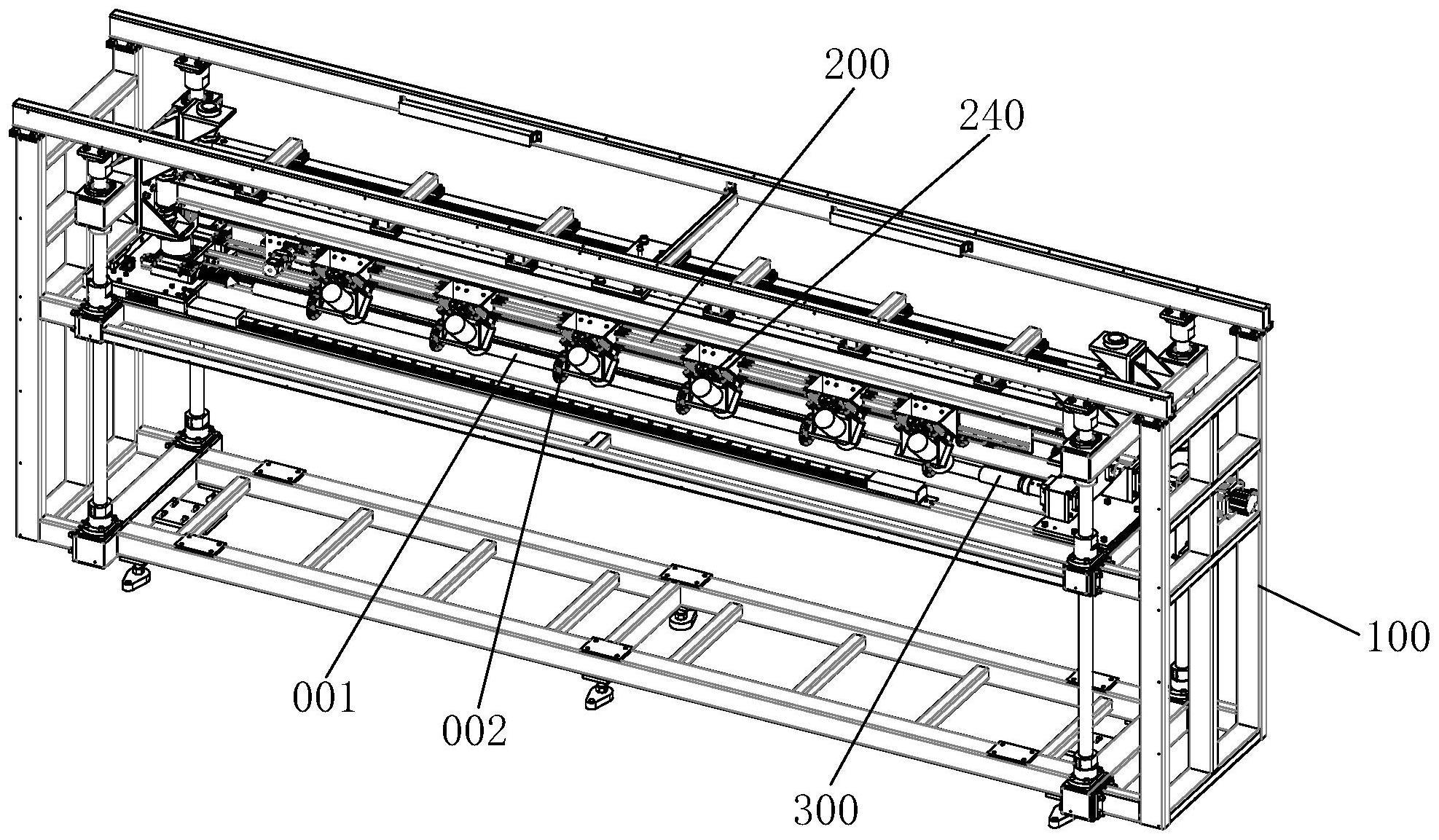
2、为解决上述技术问题,本发明提供一种用于脚手架杆件的清洁装置,包括机架,以及安装于所述机架上的打磨清洗机构和杆件定位机构,
3、所述杆件定位机构用于夹持和定位待清洁的脚手架立杆;
4、所述打磨清洗机构包括横梁、第一导轨、步进电机以及若干打磨单元,所述横梁固定于所述机架上,所述第一导轨沿所述横梁铺设,所述打磨单元分别安装于所述横梁上,并能够在所述步进电机的驱动下沿所述第一导轨滑动;
5、每个所述打磨单元包括气缸、第二导轨、滑块、电机托架、刷子电机以及刷头,所述气缸驱动所述滑块沿所述第二导轨的方向远离或靠近所述脚手架立杆,所述电机托架与所述滑块固接,所述刷子电机固定于所述电机托架上,所述刷头与所述刷子电机的输出轴固接。
6、较佳地,各个所述气缸独立驱动所述刷头远离或贴合所述脚手架立杆。
7、较佳地,所述打磨单元还包括三角形支架,所述三角形支架的立面安装于所述横梁上并能够沿所述第一导轨滑动;所述第二导轨铺设于所述三角形支架的斜面。
8、较佳地,所述三角形支架的斜面的延伸方向为所述脚手架立杆的径向。
9、较佳地,所述电机托架与所述气缸之间安装有弹簧。
10、较佳地,所述横梁上安装有若干行程开关,所述行程开关分别对应设置于所述打磨单元在所述横梁上的移动极限位置。
11、较佳地,所述杆件定位机构包括顶紧机构和旋转机构,用于控制所述脚手架立杆绕中心轴旋转。
12、与现有技术相比,本发明提供的用于脚手架杆件的清洁装置具有如下优点:
13、1、本发明采用多个刷头对杆件进行打磨式清洗,对旋转机构的压力更小,且清洁效果好,节约了水资源;
14、2、本发明可以通过控制气缸驱动滑块沿第二导轨的移动距离,调节刷头的具体位置,从而使本装置能够适用于多种不同规格的杆件清洁。
技术特征:
1.一种用于脚手架杆件的清洁装置,其特征在于,包括机架,以及安装于所述机架上的打磨清洗机构和杆件定位机构,
2.如权利要求1所述的用于脚手架杆件的清洁装置,其特征在于,各个所述气缸独立驱动所述刷头远离或贴合所述脚手架立杆。
3.如权利要求1所述的用于脚手架杆件的清洁装置,其特征在于,所述打磨单元还包括三角形支架,所述三角形支架的立面安装于所述横梁上并能够沿所述第一导轨滑动;所述第二导轨铺设于所述三角形支架的斜面。
4.如权利要求3所述的用于脚手架杆件的清洁装置,其特征在于,所述三角形支架的斜面的延伸方向为所述脚手架立杆的径向。
5.如权利要求1所述的用于脚手架杆件的清洁装置,其特征在于,所述电机托架与所述气缸之间安装有弹簧。
6.如权利要求1所述的用于脚手架杆件的清洁装置,其特征在于,所述横梁上安装有若干行程开关,所述行程开关分别对应设置于所述打磨单元在所述横梁上的移动极限位置。
7.如权利要求1所述的用于脚手架杆件的清洁装置,其特征在于,所述杆件定位机构包括顶紧机构和旋转机构,用于控制所述脚手架立杆绕中心轴旋转。
技术总结
本发明涉及一种用于脚手架杆件的清洁装置,包括机架,以及安装于机架上的打磨清洗机构和杆件定位机构,杆件定位机构用于夹持和定位待清洁的脚手架立杆;打磨清洗机构包括横梁、第一导轨、步进电机以及若干打磨单元,横梁固定于机架上,第一导轨沿横梁铺设,打磨单元分别安装于横梁上,并能够在步进电机的驱动下沿第一导轨滑动;每个打磨单元包括气缸、第二导轨、滑块、电机托架、刷子电机以及刷头,气缸驱动滑块沿第二导轨的方向远离或靠近脚手架立杆,电机托架与滑块固接,刷子电机固定于电机托架上,刷头与刷子电机的输出轴固接。本发明采用多个刷头对杆件进行打磨式清洗,不仅能够适用于多种规格的杆件,且清洁效果好,节约了水资源。
技术研发人员:赵巍锋,张志峰,王润,孙成涛,杨妍,潘晓玮
受保护的技术使用者:上海建工四建集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!