一种墙体自动打磨装置的制作方法
本发明属于建筑装修,涉及一种墙体打磨装置,尤其是一种能够实现墙体自动打磨且不会损坏墙体的装置。
背景技术:
1、建筑装修是指在建筑物的一定区域和范围内进行的,包括水电施工、墙体、地板、天花板、景观等所实现的依据一定设计理念和美观规则形成的一整套施工方案和设计方案。在建筑装修过程中,都需要对墙体进行打磨,并在打磨后涂刷油漆或贴壁纸,以使得其更光滑。
2、目前,墙体打磨工作大部分都是人工进行,工作强度大,效率低;而且,打磨过程中容易产生粉尘,对工人的健康有害。为此,墙体自动打磨装置的研发提上了日程。
3、由于墙体自动打磨装置可以采用现有机器人、无人驾驶车辆等的自动路径规划与避障技术。因此,墙体自动打磨装置的研发重点在于如何确定打磨轮距离墙体的距离以及如何实现房屋内的特定特征,例如,窗户、门等的识别。但是,现有技术中并没有这样的技术。
4、鉴于现有技术的上述技术缺陷,迫切需要研制一种新型的墙体自动打磨装置。
技术实现思路
1、本发明的目的在于克服现有技术中存在的缺点,提供一种墙体自动打磨装置,其能够实现墙体的自动打磨,且既能保证效率也不至于对墙体、门窗等造成损坏。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种墙体自动打磨装置,其包括移动小车,所述移动小车上设有安装架,其特征在于,所述安装架上设有能上下移动的安装板,所述安装板上安装有多个打磨轮和驱动所述多个打磨轮转动的打磨电机,所述安装架的顶部设有激光雷达和测距相机、侧部设有控制器,所述激光雷达、测距相机和打磨电机都与所述控制器相连,所述控制器基于所述激光雷达的检测结果模拟出房屋内的空间分布并进行路线规划以及自动避障,同时,所述控制器基于所述测距相机采集的相机图像获得所述测距相机距离前方的距离以及实现房屋内的具有显著尺度信息的特征的识别并基于所述距离前方的距离以及房屋内的具有显著尺度信息的特征的识别结果控制所述打磨电机的启停,以实现自动打磨。
4、优选地,所述房屋内的具有显著尺度信息的特征包括窗户、门、支撑柱和管道。
5、优选地,所述控制器基于所述测距相机采集的相机图像获得所述测距相机距离前方的距离以及实现房屋内的具有显著尺度信息的特征的识别具体包括:
6、1)、将所述测距相机采集的相机图像实时地输入到特征识别网络中;
7、2)、基于所述特征识别网络识别出房屋内的各个具有显著尺度信息的特征;
8、3)、对识别出的所述房屋内的各个具有显著尺度信息的特征进行距离测算,获得各个具有显著尺度信息的特征的测距结果;
9、4)、基于所述各个具有显著尺度信息的特征的测距结果以及所述各个具有显著尺度信息的特征的置信度获得所述测距相机距离前方的距离。
10、优选地,在进行步骤1)之前,还需要:
11、01)、采集房屋的具有显著尺度信息的特征的尺度信息;
12、02)、利用所述测距相机采集房屋内在不同光线环境以及不同地点的多张相机图像;
13、03)、对多张所述相机图像中所述具有显著尺度信息的特征进行标注;
14、04)、选择特征识别网络模型;
15、05)、将标注后的相机图像输入到所述特征识别网络模型中进行训练,得到所述特征识别网络。
16、优选地,所述特征识别网络模型为目标识别网络模型或语义分割网络模型。
17、优选地,在进行标注时,采用矩形框标注或语义分割标注。
18、优选地,所述安装架上设有两根竖向丝杠,所述安装板的两端分别通过一个旋转螺母与所述两根竖向丝杠相连,所述安装架的下部还设有一个双输出轴升降电机,所述双输出轴升降电机用于驱动所述两根竖向丝杠进行正反向转动。
19、优选地,所述双输出轴升降电机的两个输出轴上分别安装有一个第一伞齿轮,所述两根竖向丝杠上分别安装有一个与所述第一伞齿轮相啮合的第二伞齿轮。
20、优选地,所述移动小车的底部设有多个行走轮。
21、与现有技术相比,本发明的墙体自动打磨装置具有如下有益技术效果中的一者或多者:
22、1、其能够实现墙体的自动打磨,一方面能够降低工人的劳动强度、保证工人的健康,另一方面能够提高效率。
23、2、其能够实现对前方距离的自动测定,并根据测定结果实现对墙体自动打磨装置的打磨轮的控制,不会出现打磨不干净或者打磨过深从而损坏墙体的现象。
24、3、其能够实现对门、窗、管道等房屋内特定特征的自动识别,并根据识别结果实现对打磨轮的控制,从而不会造成门、窗、管道等的损坏。
技术特征:
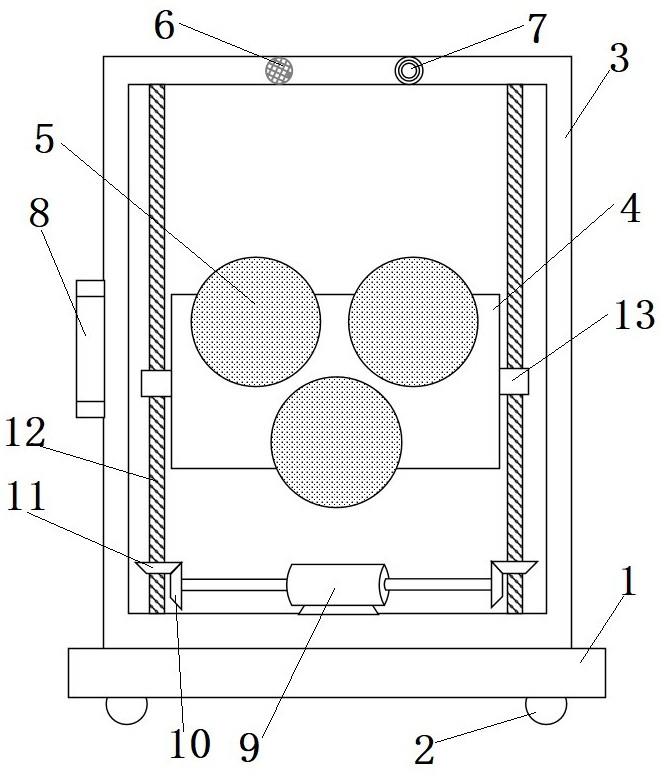
1.一种墙体自动打磨装置,其包括移动小车(1),所述移动小车(1)上设有安装架(3),其特征在于,所述安装架(3)上设有能上下移动的安装板(4),所述安装板(4)上安装有多个打磨轮(5)和驱动所述多个打磨轮(5)转动的打磨电机,所述安装架(3)的顶部设有激光雷达(6)和测距相机(7)、侧部设有控制器(8),所述激光雷达(6)、测距相机(7)和打磨电机都与所述控制器(8)相连,所述控制器(8)基于所述激光雷达(6)的检测结果模拟出房屋内的空间分布并进行路线规划以及自动避障,同时,所述控制器(8)基于所述测距相机(7)采集的相机图像获得所述测距相机(7)距离前方的距离以及实现房屋内的具有显著尺度信息的特征的识别并基于所述距离前方的距离以及所述具有显著尺度信息的特征的识别结果控制所述打磨电机的启停,从而实现自动打磨。
2.根据权利要求1所述的墙体自动打磨装置,其特征在于,所述房屋内的具有显著尺度信息的特征包括窗户、门、支撑柱和管道。
3.根据权利要求2所述的墙体自动打磨装置,其特征在于,所述控制器(8)基于所述测距相机(7)采集的相机图像获得所述测距相机(7)距离前方的距离以及实现房屋内的具有显著尺度信息的特征的识别具体包括:
4.根据权利要求3所述的墙体自动打磨装置,其特征在于,在进行步骤1)之前,还需要:
5.根据权利要求4所述的墙体自动打磨装置,其特征在于,所述特征识别网络模型为目标识别网络模型或语义分割网络模型。
6.根据权利要求5所述的墙体自动打磨装置,其特征在于,在进行标注时,采用矩形框标注或语义分割标注。
7.根据权利要求1-6中任一项所述的墙体自动打磨装置,其特征在于,所述安装架(2)上设有两根竖向丝杠(12),所述安装板(4)的两端分别通过一个旋转螺母(13)与所述两根竖向丝杠(12)相连,所述安装架(3)的下部还设有一个双输出轴升降电机(9),所述双输出轴升降电机(9)用于驱动所述两根竖向丝杠(12)进行正反向转动。
8.根据权利要求7所述的墙体自动打磨装置,其特征在于,所述双输出轴升降电机(9)的两个输出轴上分别安装有一个第一伞齿轮(10),所述两根竖向丝杠(12)上分别安装有一个与所述第一伞齿轮(10)相啮合的第二伞齿轮(11)。
9.根据权利要求8所述的墙体自动打磨装置,其特征在于,所述移动小车(1)的底部设有多个行走轮(2)。
技术总结
本发明涉及一种墙体自动打磨装置,包括移动小车(1),其上设有安装架(3),安装架(3)上设有安装板(4),安装板(4)上安装有多个打磨轮(5)和打磨电机,安装架(3)顶部设有激光雷达(6)和测距相机(7)、侧部设有控制器(8),激光雷达(6)、测距相机(7)和打磨电机与控制器(8)相连,控制器(8)基于激光雷达(6)的检测结果模拟出房屋内的空间分布并进行路线规划以及自动避障,同时基于测距相机(7)采集的相机图像获得其距离前方的距离以及实现房屋内的具有显著尺度信息的特征的识别并基于距离和识别结果控制打磨电机的启停。其能够实现墙体的自动打磨,且既能保证效率也不至于对墙体、门窗等造成损坏。
技术研发人员:吴云兰
受保护的技术使用者:吴云兰
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!