一种粉末成型机凹模伺服控制系统
本发明属于粉末冶金设备,具体涉及一种粉末成型机凹模伺服控制系统。
背景技术:
1、在粉末压制成型过程中,凹模运动过程主要包括上移充填和下移压制过程。其中,在上移充填过程中,凹模运动过程需要实现精确控制,确保与送料过程相匹配;在下移压制过程中,凹模受压制力作用并跟随压制机构实现下移。在压制力撤销时,凹模会因复位油缸下腔压力过大导致凹模上移,此外,还需要防止凹模等机构因为自身重力原因自行下移,即实现凹模保持功能,防止因为凹模突然移动导致型腔内制品损坏。
2、专利公开号为cn112610549a的发明专利公开了一种与送料过程相适应的伺服控制充填系统及其工作过程,其方案是通过带有伺服比例电磁阀的液压伺服控制系统来控制凹模上移充填过程中的位置和速度。该方案存在的问题是:不能自动补偿因外界干扰引起的凹模位置误差,控制精度较低,并且该控制系统无法实现凹模保持能。
技术实现思路
1、本发明的目的在于提供一种控制精准,能够很好实现凹模上移充填和下移压制运动过程控制的一种粉末成型机凹模伺服控制系统。
2、为此本发明所采用的技术方案是:
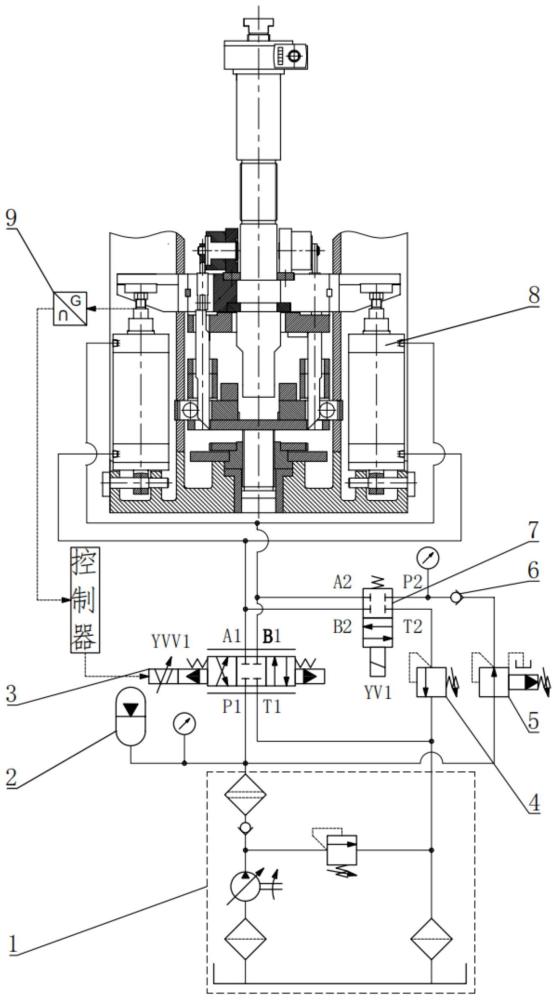
3、一种粉末成型机凹模伺服控制系统,包括液压源、蓄能器、电液伺服阀、第一溢流阀、减压阀、第一单向阀、电磁换向阀、复位油缸和位置传感器,所述液压源的出油管路和回油管路分别与电液伺服阀的p1口和t1口相连,电液伺服阀的a1口和b1口分别与复位油缸的下油口和上油口相连;所述液压源的出油管路和回油管路又分别与减压阀和第一溢流阀相连,减压阀与第一单向阀进油口相连,第一单向阀和第一溢流阀分别与电磁换向阀的p2口和t2口相连,电磁换向阀的a2口和b2口分别与复位油缸的上油口和下油口相连;所述液压源和电液伺服阀的p1口间设置有蓄能器;所述复位油缸上设有位置传感器,用于监测复位油缸活塞位置并发送给控制器,控制器用于控制电液伺服阀内阀芯位移大小,改变流量大小,从而控制复位油缸活塞位置和速度。
4、与现有技术相比,本发明的显著优点是:
5、(1)本发明采用电液伺服阀控制凹模上移充填过程,相较于传统气动控制或者比例阀控制,控制精度更高,响应速度更快。
6、(2)本发明采用位置传感器对凹模位置进行监测,通过编程反馈控制凹模运动过程,使凹模运动曲线与预设曲线更加贴合,自动补偿凹模运动过程中的位置误差,使得控制精度进一步提高。
7、(3)本发明可以实现凹模保持功能,防止因外力变化或自身重力导致凹模突然位移造成制品开裂损坏,从而提高制品良品率。
8、(4)在下移压制过程中,本发明通过低压补油方式,减小液压源压力对凹模移动速度的影响,使凹模更好跟随压制机构运动,有利于提高较薄制品良品率。
技术特征:
1.一种粉末成型机凹模伺服控制系统,其特征在于,包括液压源(1)、蓄能器(2)、电液伺服阀(3)、第一溢流阀(4)、减压阀(5)、第一单向阀(6)、电磁换向阀(7)、复位油缸(8)和位置传感器(9),所述液压源(1)的出油管路和回油管路分别与电液伺服阀(3)的p1口和t1口相连,电液伺服阀(3)的a1口和b1口分别与复位油缸(8)的下油口和上油口相连;所述液压源(1)的出油管路和回油管路又分别与减压阀(5)和第一溢流阀(4)相连,减压阀(5)与第一单向阀(6)进油口相连,第一单向阀(6)和第一溢流阀(4)分别与电磁换向阀(7)的p2口和t2口相连,电磁换向阀(7)的a2口和b2口分别与复位油缸(8)的上油口和下油口相连;所述液压源(1)和电液伺服阀(3)的p1口间设置有蓄能器(2);所述复位油缸(8)上设有位置传感器(9),用于监测复位油缸(8)活塞位置并发送给控制器,控制器用于控制电液伺服阀(3)内阀芯位移大小,改变流量大小,从而控制复位油缸(8)活塞位置和速度。
2.根据权利要求1所说的粉末成型机凹模伺服控制系统,其特征在于,
3.根据权利要求1所说的粉末成型机凹模伺服控制系统,其特征在于,所述电磁换向阀为常闭电磁阀。
4.根据权利要求1所说的粉末成型机凹模伺服控制系统,其特征在于,所述液压源包括油箱,所述油箱通过出油管路依次连接第一过滤器、液压泵、第二单向阀和第二过滤器,所述液压泵又通过回油管路依次连接第二溢流阀、第三过滤器和油箱。
技术总结
本发明涉及一种粉末成型机凹模伺服控制系统,包括液压源,所述液压源的出油管路和回油管路分别与电液伺服阀的P1口和T1口相连,电液伺服阀的A1口和B1口分别与复位油缸的下油口和上油口相连;所述液压源的出油管路和回油管路又分别与减压阀和第一溢流阀相连,减压阀与第一单向阀进油口相连,第一单向阀和第一溢流阀分别与电磁换向阀的P2口和T2口相连,电磁换向阀的A2口和B2口分别与复位油缸的上油口和下油口相连;所述复位油缸上设有位置传感器,所述位置传感器与控制器连接,所述控制器与电液伺服阀连接。本发明控制精度高,能够很好实现凹模上移充填和下移压制运动过程的控制。
技术研发人员:陆宝春,孔德浩,冯金玉,潘学仁,栾长平
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!