一种非球面抛光机器人安全隔离罩的制作方法
本发明涉及非球面凸镜打磨设备领域,具体为一种非球面抛光机器人安全隔离罩。
背景技术:
1、非球面透镜是光学领域中常会运用到的配件,这种透镜具有更好的曲率半径从而能够维持良好的相差修正,使用性能较好,然而在光学领域中常会利用非球面抛光技术对透镜进行加,目前为了能够更加快捷有效地对大型的非球面抛光技术对透镜进行加工时,就需要采用一种非球面抛光机器人进行加工。
2、现有的非球面抛光机器人在对非球面抛光技术对透镜进行加工的过程中会打磨掉透镜上的玻璃纤维碎屑,而且由于在打磨过程中需要进行喷水作业,这时为了避免飞散的玻璃纤维被工作人员吸入,以及喷水时可能会导致水分飞溅到工作人员身上,这时就需要提供一种非球面抛光机器人安全隔离罩来对工作人员进行保护,以起到更好的实用性。
技术实现思路
1、基于此,本发明的目的是提供一种非球面抛光机器人安全隔离罩,以解决传统非球面抛光机器人在进行抛光时可以有效地避免水分以及玻璃纤维碎屑飞溅而落到工作人员身上的技术问题。
2、为实现上述目的,本发明提供如下技术方案:一种非球面抛光机器人安全隔离罩,包括安装座,所述安装座的底部设置有隔离机构,所述隔离机构与安装座拆卸连接,所述隔离机构包括漏水槽。
3、通过采用上述技术方案,由于安装座的底部设置有隔离机构,所述隔离机构与安装座拆卸连接,因此隔离机构可以与安装座进行拆卸,当隔离机构出现问题后可以进行拆卸检修。
4、进一步的,所述漏水槽的顶部外侧设置有下挡板,所述下挡板的顶部开设有滑槽,所述滑槽的内部设置有直线电机,且直线电机为圆形结构设置。
5、通过采用上述技术方案,由于所述漏水槽的顶部外侧设置有下挡板,通过下挡板可以全方位的避免水分在斜下方飞溅到外面,而且还可以有效地安装滑槽。
6、进一步的,所述直线电机上设置有滑动座,且滑动座的顶部拆卸连接有隔离罩,所述隔离罩的材质为透明亚克力板。
7、通过采用上述技术方案,由于直线电机上设置有滑动座,且滑动座的顶部拆卸连接有隔离罩,因此直线电机是通过滑动座与隔离罩进行安装的,隔离罩可以单独拆卸进行更换清理。
8、进一步的,所述安装座的顶部设置有机械臂,所述机械臂包括第一转动件,所述第一转动件的下方设置有霍尔传感器,所述第一转动件的外侧设置有电磁片。
9、通过采用上述技术方案,由于所述安装座的顶部设置有机械臂,所述机械臂包括第一转动件,所述第一转动件的下方设置有霍尔传感器,因此霍尔传感器可以感应电磁片的位置,并实时的对直线电机进行信号输出。
10、进一步的,所述下挡板和漏水槽的材质均为不锈钢,所述下挡板呈圆形结构设置。
11、通过采用上述技术方案,由于所述下挡板和漏水槽的材质均为不锈钢材质,因此下挡板和漏水槽不易生锈,而且硬度较高。
12、进一步的,所述下挡板的材质为铝合金材质,所述下挡板的内壁贴附有防腐层。
13、通过采用上述技术方案,由于下挡板的材质为铝合金材质,因此下挡板硬度高、重量轻极为方便安装。
14、进一步的,所述第一转动件的顶部设置有传动组件,所述传动组件的一端设置有拆卸座。
15、通过采用上述技术方案,由于所述第一转动件的顶部设置有传动组件,而传动组件是机械臂的主要构成,确保了机械臂的运动。
16、进一步的,所述拆卸座的内部拆卸连接有安装头,所述安装头的一端设置有抛光机,所述抛光机的输出端设置有抛光轮。
17、通过采用上述技术方案,由于所述拆卸座的内部拆卸连接有安装头,通过安装头可以有效地插入拆卸座的内部,有利于后续的固定。
18、进一步的,所述抛光轮的下方设置有固定座,所述固定座的顶部设置有转盘。
19、通过采用上述技术方案,由于所述抛光轮的下方设置有固定座,通过固定座可以在内部安装电机,而且可以有效地安装转盘。
20、进一步的,所述转盘的外侧设置有四个喷水头,四个所述喷水头呈矩形阵列排布。
21、通过采用上述技术方案,由于所述转盘的外侧设置有四个喷水头,通过四个喷水头可以进行喷水作业。
22、综上所述,本发明主要具有以下有益效果:
23、1、本发明通过设置隔离机构,在使用过程中通过设置漏水槽,在通过喷水头进行喷水作业时,水分会直接落入漏水槽内,随后被废水收集管将水进行收集,通过设置滑槽和直线电机可有效地确保隔离罩能够滑动,通过隔离罩可以有效地保护工人不会被水分、以及打磨飞溅的残渣伤及工人;
24、2、本发明通过设置霍尔传感器、电磁片,霍尔传感器可以感应电磁片的位置,在第一转动件进行转动时,可以被电磁片进行触发,让隔离罩实时的跟随机械臂的运动,这样通过霍尔传感器可以有效地确保在进行下料时隔离罩不会妨碍其他机械臂进行下料作业。
技术特征:
1.一种非球面抛光机器人安全隔离罩,包括安装座(1),其特征在于:所述安装座(1)的底部设置有隔离机构(7),所述隔离机构(7)与安装座(1)拆卸连接,所述隔离机构(7)包括漏水槽(701)。
2.根据权利要求1所述的非球面抛光机器人安全隔离罩,其特征在于:所述漏水槽(701)的顶部外侧设置有下挡板(707),所述下挡板(707)的顶部开设有滑槽(702),所述滑槽(702)的内部设置有直线电机(703),且直线电机(703)为圆形结构设置。
3.根据权利要求2所述的非球面抛光机器人安全隔离罩,其特征在于:所述直线电机(703)上设置有滑动座,且滑动座的顶部拆卸连接有隔离罩(704),所述隔离罩(704)的材质为透明亚克力板。
4.根据权利要求1所述的非球面抛光机器人安全隔离罩,其特征在于:所述安装座(1)的顶部设置有机械臂(2),所述机械臂(2)包括第一转动件(201),所述第一转动件(201)的下方设置有霍尔传感器(705),所述第一转动件(201)的外侧设置有电磁片(706)。
5.根据权利要求2所述的非球面抛光机器人安全隔离罩,其特征在于:所述下挡板(707)和漏水槽(701)的材质均为不锈钢材质,所述下挡板(707)呈圆形结构设置。
6.根据权利要求2所述的非球面抛光机器人安全隔离罩,其特征在于:所述下挡板(707)的材质为铝合金材质,所述下挡板(707)的内壁贴附有防腐层。
7.根据权利要求4所述的非球面抛光机器人安全隔离罩,其特征在于:所述第一转动件(201)的顶部设置有传动组件(202),所述传动组件(202)的一端设置有拆卸座(3)。
8.根据权利要求7所述的非球面抛光机器人安全隔离罩,其特征在于:所述拆卸座(3)的内部拆卸连接有安装头(4),所述安装头(4)的一端设置有抛光机(5),所述抛光机(5)的输出端设置有抛光轮(6)。
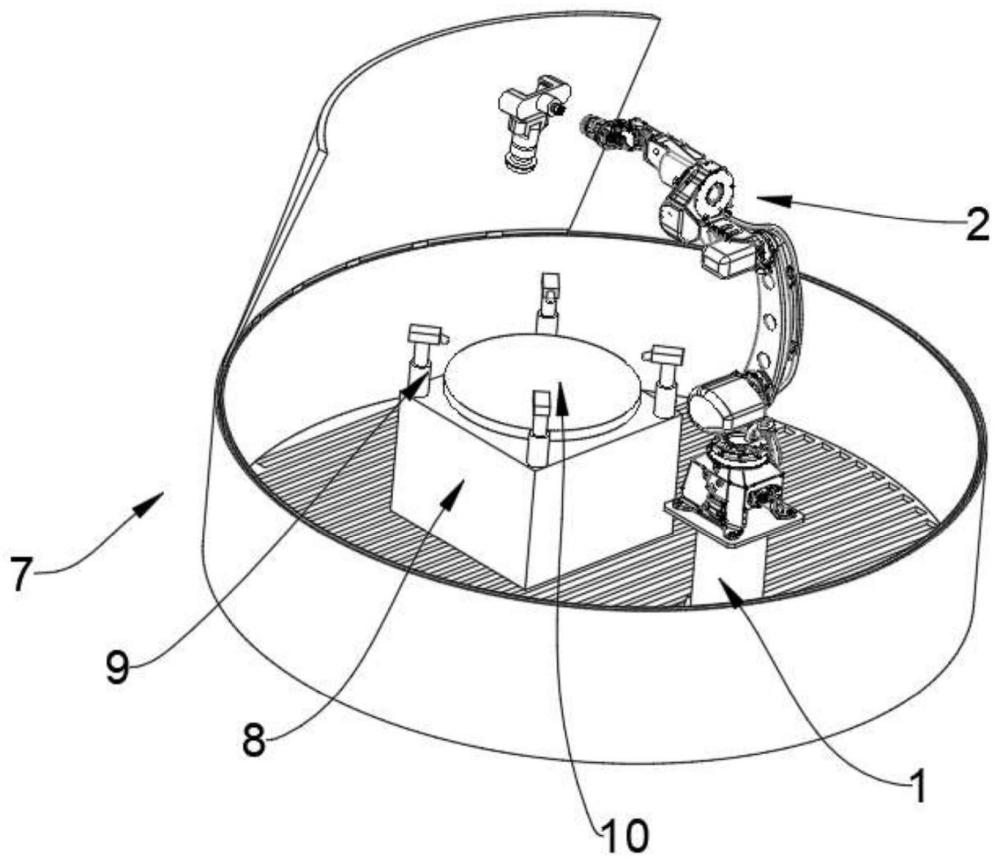
9.根据权利要求8所述的非球面抛光机器人安全隔离罩,其特征在于:所述抛光轮(6)的下方设置有固定座(8),所述固定座(8)的顶部设置有转盘(10)。
10.根据权利要求9所述的非球面抛光机器人安全隔离罩,其特征在于:所述转盘(10)的外侧设置有四个喷水头(9),四个所述喷水头(9)呈矩形阵列排布。
技术总结
本发明公开了一种非球面抛光机器人安全隔离罩,涉及非球面凸镜打磨设备领域。本发明包括安装座,所述安装座的底部设置有隔离机构,本发明通过设置隔离机构,在使用过程中通过设置漏水槽,在通过喷水头进行喷水作业时,水分会直接落入漏水槽内,随后被废水收集管将水进行收集,通过设置滑槽和直线电机可有效地确保隔离罩能够滑动,通过隔离罩可以有效地保护工人不会被水分、以及打磨飞溅的残渣伤及工人,而且通过设置霍尔传感器、电磁片,霍尔传感器可以感应电磁片的位置,让隔离罩实时的跟随机械臂的运动,这样通过霍尔传感器可以有效地确保在进行下料时隔离罩不会妨碍其他机械臂进行下料作业。
技术研发人员:冯志庆
受保护的技术使用者:泽木焱光学科技(苏州)有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!