一种升降机构及包含其的增材设备的制作方法
本技术涉及金属增材制造,具体涉及一种升降机构及包含其的增材设备。
背景技术:
1、ded(直接能量沉积)增材制造(3d打印)技术是一种采用电子束、激光、电弧或等离子弧作为热源将金属丝材熔化,在程序或软件控制下采用逐层熔覆原理,根据零部件的三维数字模型由“点-线-面-体”制造出接近产品形状、尺寸,并满足性能要求的三维金属坯件的先进数字化制造技术。ded增材制造技术具有制造成本低、材料利用率高、生产效率高等优点。
2、增材制造技术是一种新型的,具有潜力的先进数字制造技术,与传统加工方式相比,其通过逐层累积材料的方式实现金属零件的制造,为非接触式加工,不受加工刀具,零件结构,模具等因素的束缚,能够实现薄壁,封闭内腔等复杂零件的制造。伴随着国内外航天航空行业对生产制造和加工工艺要求的逐步提高。结构复杂,制造一体化,成本低,研制周期短的航空航天结构件已经成为航天航空部件制造的发展方向。为适应时代以及市场的需求,应用于航空航天领域的大尺寸增材制造设备的发展已经成为必然。
3、按照热源种类的不同,增材制造设备可分为激光增材制造,电子束增材制造和电弧增材制造,电弧熔丝增材制造技术采用焊接电弧作为热源,通过不同的路径规划算法将零件的三维模型转化为层状的增材路径,通过送丝结构,机械臂,变位器,以及焊枪,按照规划好的路线自下而上逐层熔覆而成形金属构件。相较于激光和电子束增材制造,电弧增材制造成形效率更高,丝材利用率高达90%以上,能够更加快速的进行金属构件的制造,不需要气体保护箱以及真空箱等设备,工件尺寸亦不受设备本身的空间尺寸的过多制约,大幅减少对于设备的投资成本。
4、但现有设备可实现的增材制造工件尺寸并不够大,许多工件加工结束之后依然需要焊接,组装。现有技术涉及的增材制造设备,其变位机构与机器人相对位置固定,且均固定于地面,受到硬链接限制,打印范围以及打印高度基本固定,整体制造工件大小受限。现有技术不能合理利用机器人有效范围,且运动过程中由于机器人各轴限位的问题会出现使机器人反关节的位置,降低加工速度以及打印精度。
技术实现思路
1、为了解决现有技术无法打印超大尺寸结构件的问题,本实用新型设计了一种升降机构及包含其的增材设备。本实用新型将升降机构应用于制造大尺寸航天结构件的增材制造设备,以此扩大设备制造工件的尺寸范围,有效利用机器人机械臂的工作范围。
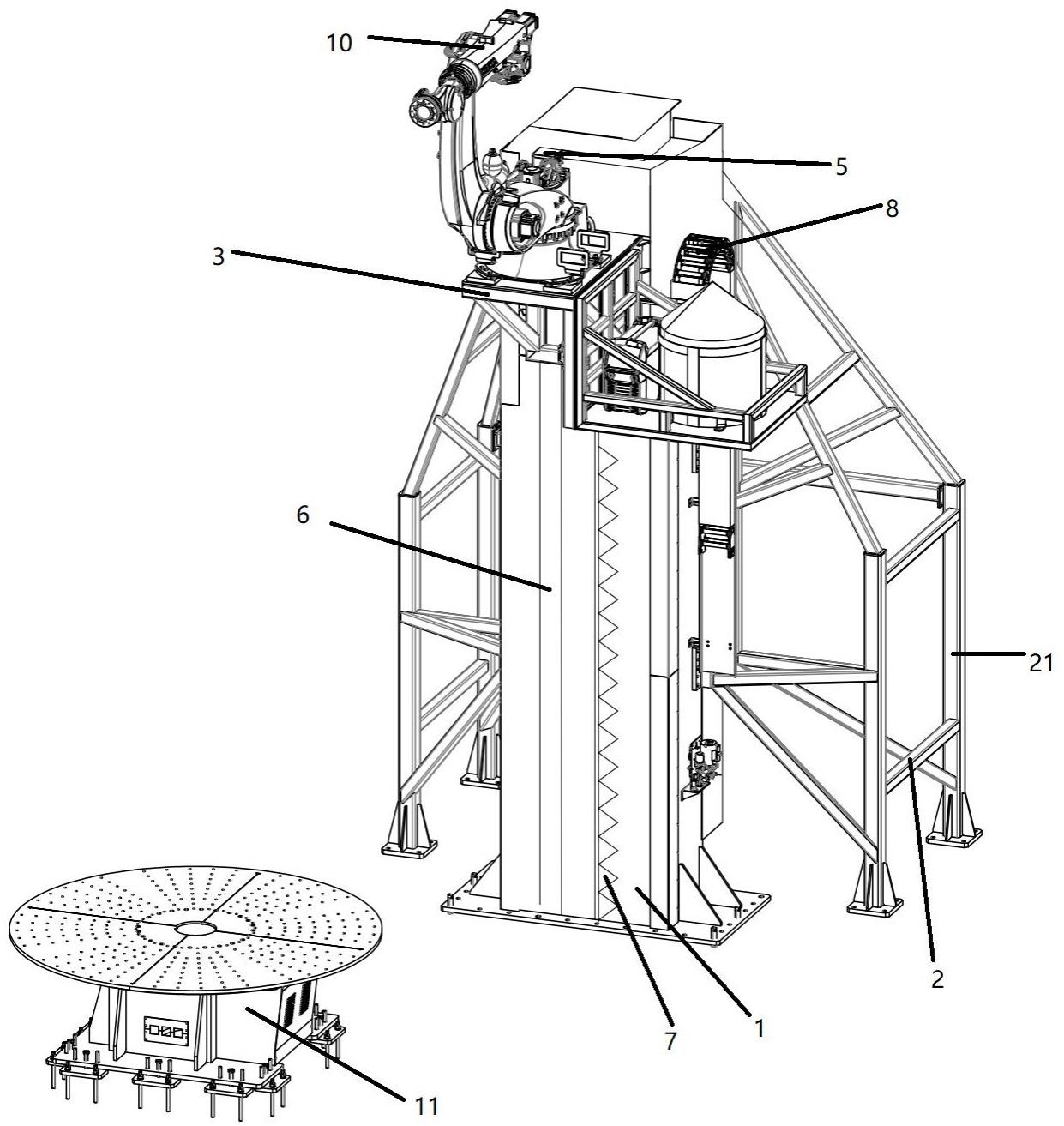
2、一种升降机构,所述升降机构用于增材制造大尺寸航天结构件,所述升降机构通过基座固定于地面,所述升降机构背部一侧固定连接辅助支架,所述辅助支架包括不少于两根固定连接的支撑杆,对升降机构起支撑作用或配重作用;所述升降机构相对于辅助支架的正面一侧连接机器人支座,所述机器人支座用于托举机器人沿着升降机构上下运动。
3、进一步的,所述升降机构正面一侧固定有导向滑轨和齿轮链条,所述机器人支座的底部靠近齿轮链条的一侧安装有驱动电机,所述驱动电机上连接齿轮组,所述齿轮组与齿轮链条配合,并通过导向滑轨导向实现机器人支座的上下运动。导向滑轨的设计,实现了机器人支座上下运动时方向的准确性,驱动电机和齿轮啮合的设计,以及驱动电机内部的负反馈,实现了机器人支座上下运动时运动距离的准确度,可达到0.05mm的定位精度。
4、进一步的,还包括活动折弯的导线槽内,所述导线槽一端固定于升降机构基座,另一端连接机器人支座并跟随机器人支座上下运动。所述导线槽可内置线缆,防止机器人支座上下运动时,线缆缠绕。驱动电机的电源线、信号线和润滑喷油管均固定于活动折弯的导线槽内。
5、进一步的,所述升降机构背部一侧设置有配重块,所述配重块与机器人支座通过钢丝绳连接,所述钢丝绳通过升降机构顶部的定滑轮。
6、一种包含所述升降机构的增材设备,所述机器人支座上部固定六轴机器人。
7、进一步的,所述升降机构正面一侧斜对角的位置,有变位机构固定连接于地面,所述变位机构为单轴或两轴变位机。
8、进一步的,所述变位机构与六轴机器人在水平方向呈20-50度夹角。
9、进一步的,所述变位机构与六轴机器人在水平方向呈35度夹角。
10、本实用新型的工作原理:驱动电机驱动齿轮组配合齿轮链条传动,进而托举机器人支座上下运动。变位机构水平旋转或沿着中心轴摆动配合六轴机器人进行金属增材制造。
11、当机器人支座向上运动至升降机构顶部时,六轴机器人端部向下运动的长度可达3-4m,可打印8-10m高度的结构件。该斜对角位置布置变位机构的设计可扩大机器人的打印范围,防止升降机构妨碍机器人的打印范围。
12、本实用新型的有益技术效果是:机器人支座的结构设计,解决了机器人固定于地面连接导致的打印范围受限问题;机器人与变位机构的相对20-50度夹角位置的布置设计,进一步解决了机器人打印范围受限的问题;升降机构的设计使得增材设备充分利用了六轴机器人的臂长,扩大了制造的水平范围以及高度,使得可制造的工件整体尺寸大幅增加,便于一次成型,减少了后处理的步骤,充分体现了增材制造的优势。
技术特征:
1.一种升降机构,其特征在于:所述升降机构用于增材制造大尺寸航天结构件,所述升降机构通过基座固定于地面,所述升降机构背部一侧固定连接辅助支架,所述升降机构相对于辅助支架的正面一侧连接机器人支座,所述机器人支座用于托举机器人沿着升降机构上下运动。
2.根据权利要求1所述的一种升降机构,其特征在于:所述升降机构正面一侧固定有导向滑轨和齿轮链条,所述机器人支座的底部靠近齿轮链条的一侧安装有驱动电机,所述驱动电机上连接齿轮组,所述齿轮组与齿轮链条配合,并通过导向滑轨导向实现机器人支座的上下运动。
3.根据权利要求2所述的一种升降机构,其特征在于:还包括活动折弯的导线槽内,所述导线槽一端固定于升降机构基座,另一端连接机器人支座并跟随机器人支座上下运动。
4.根据权利要求2所述的一种升降机构,其特征在于:所述升降机构背部一侧设置有配重块,所述配重块与机器人支座通过钢丝绳连接,所述钢丝绳通过升降机构顶部的定滑轮。
5.一种包含权利要求1-4任一所述的升降机构的增材设备,其特征在于:所述机器人支座上部设置有六轴机器人。
6.根据权利要求5所述的一种增材设备,其特征在于:所述升降机构正面一侧斜对角的位置,有变位机构固定连接于地面,所述变位机构为单轴或两轴变位机。
7.根据权利要求6所述的一种增材设备,其特征在于:所述变位机构与六轴机器人在水平方向呈20-50度夹角。
8.根据权利要求7所述的一种增材设备,其特征在于:所述变位机构与六轴机器人在水平方向呈35度夹角。
技术总结
一种升降机构及包含其的增材设备,包含升降机构、机器人和变位机构,升降机构固定于地面,升降机构背部一侧固定连接辅助支架;升降机构相对于辅助支架的正面一侧连接机器人支座,机器人支座用于托举机器人沿着升降机构上下运动,扩大机器人的打印高度,同时机器人与变位机构斜对角布置,扩大打印机的水平打印范围。
技术研发人员:刘野,支镜任,高振凯,陈龙
受保护的技术使用者:苏州融速智造科技有限公司
技术研发日:20230505
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!