一种用于砂带磨床的回转伸缩工作台的制作方法
本技术属于砂带打磨,涉及一种用于砂带磨床的回转伸缩工作台。
背景技术:
1、现有的砂带打磨设备的工作台大都以平面工作台为主,结构简单,针对不同大小的工件往往需要加装适合的定位夹紧工装,工件就位准备时间长,不同大小的工件切换时间长,且不可旋转角度,在一定程度上制约了砂带打磨设备的生产效率。
技术实现思路
1、为了克服现有的砂带打磨设备的工作台工装准备时间较长的问题,本实用新型提供一种用于砂带磨床的回转伸缩工作台,该工作台可以在地轨上前后移动,从而配合砂带磨床定点打磨;工作台可伸缩,以夹持不同大小的工件;工作台可绕工作台框架的中心线回转,以配合砂带磨床针对工件不同位置的打磨,也可实现工件同一位置纵向或横向的打磨。
2、本实用新型所采用的技术方案:
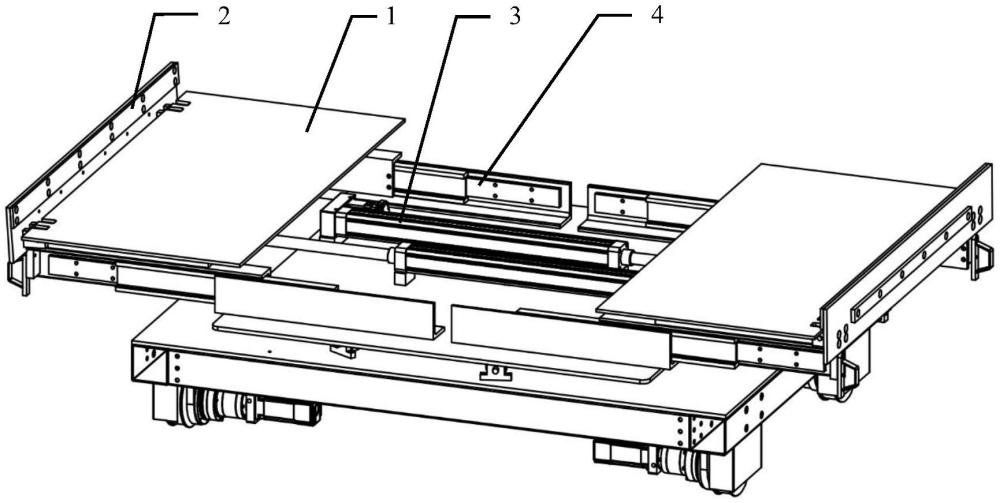
3、一种用于砂带磨床的回转伸缩工作台,包括工作台板、夹板、伺服电缸、伸缩导轨、底板、支撑滚轮装置、转轴装置、工作台框架、行走轮、伺服马达。
4、两个伺服电缸及左右两组伸缩导轨安装于底板上,一组沿圆周方向布置的支撑滚轮装置安装在工作台框架上,作为底板的支撑,底板通过转轴装置与工作台框架连接,底板可以在工作台框架上实现旋转。
5、两个伺服电缸的输出端分别与左右两个工作台板相连,左右两个工作台板安装于左右两组伸缩导轨上,两个伺服电缸的伸缩带动两个工作台板及夹板沿着伸缩导轨收拢或张开,以适应不同大小工件的装夹要求。
6、为了进一步实现本实用新型目的,四个行走轮安装于工作台框架底部,通过两个伺服马达驱动工作台在地轨上前后移动,以配合砂带磨床针对工件不同位置的打磨。
7、优选的,夹板的角度可调,以适应不规格形状工件的夹持。
8、优选的,转轴装置留有伺服马达接口,采取伺服马达驱动,可以自动控制工作台的旋转角度。
9、优选的,伸缩导轨采用三段式伸缩导轨,以获得较大的伸缩行程和较高的稳定性。
10、本实用新型的有益效果如下:
11、1、可以实现尺寸大小在一定范围内工件的快速装夹。
12、2、一组沿圆周方向布置的支撑滚轮装置安装在工作台框架上,支撑在底板四周边缘位置,由于支撑范围较大,可以获取较佳的支撑稳定性。
13、3、两个伺服电缸的输出端可以停留在其行程范围内的任意位置,以适应不同大小工件的装夹要求。
14、4、两个伺服电缸输出力的大小可以设定,从而精确控制其对工件的夹紧力。
15、5、一种用于砂带磨床的回转伸缩工作台可以在地轨上前后移动,从而和砂带磨床联动控制,以实现自动化打磨。
技术特征:
1.一种用于砂带磨床的回转伸缩工作台,包括工作台板、夹板、伺服电缸、伸缩导轨、底板、支撑滚轮装置、转轴装置、工作台框架、行走轮、伺服马达,其特征在于:所述伺服电缸与所述伸缩导轨安装于所述底板上,所述工作台板安装于所述伸缩导轨上,所述支撑滚轮装置安装于所述工作台框架上,所述底板通过所述转轴装置与所述工作台框架连接。
2.根据权利要求1所述的一种用于砂带磨床的回转伸缩工作台,其特征在于:一组沿圆周方向布置的所述支撑滚轮装置安装在所述工作台框架上,支撑在所述底板四周边缘位置,以获取较佳的支撑稳定性。
3.根据权利要求1所述的一种用于砂带磨床的回转伸缩工作台,其特征在于:所述底板可以在所述工作台框架上围绕所述转轴装置的中心旋转。
4.根据权利要求1所述的一种用于砂带磨床的回转伸缩工作台,其特征在于:所述伺服电缸的输出端与所述工作台板相连,所述伺服电缸的伸缩带动所述工作台板沿着所述伸缩导轨收拢或张开。
5.根据权利要求1所述的一种用于砂带磨床的回转伸缩工作台,其特征在于:所述两个伺服电缸的输出端可以停留在其行程范围内的任意位置,以适应不同大小工件的装夹要求。
6.根据权利要求1所述的一种用于砂带磨床的回转伸缩工作台,其特征在于:所述两个伺服电缸可以设定输出力的大小,从而精确控制其对工件的夹紧力。
技术总结
一种用于砂带磨床的回转伸缩工作台,包括工作台板、夹板、伺服电缸、伸缩导轨、底板、支撑滚轮装置、转轴装置、工作台框架、行走轮、伺服马达。两个伺服电缸及左右两组伸缩导轨安装于底板上,一组沿圆周方向布置的支撑滚轮装置安装在工作台框架上,作为底板的支撑,底板通过转轴装置与工作台框架连接,底板可以在工作台框架上实现旋转,四个行走轮位于工作台框架底部,通过两个伺服马达驱动工作台的前后移动。两个伺服电缸的输出端分别与左右两个工作台板相连,左右两个工作台板安装于左右两组伸缩导轨上,两个伺服电缸的伸缩带动两个工作台板及夹板沿着左右两组伸缩导轨收拢或张开,以适应不同大小工件的装夹要求。一种用于砂带磨床的回转工作台可以在地轨上前后移动,以配合砂带磨床针对工件不同位置的打磨。
技术研发人员:朱月阳
受保护的技术使用者:帕玛自动化科技(苏州)有限公司
技术研发日:20230609
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!