一种钢包砌筑机器人工作站及方法与流程
本发明涉及建筑施工设备,尤其涉及一种钢包砌筑机器人工作站及方法。
背景技术:
1、目前在炼钢领域,钢包主要用于盛接金属液,其构造主要由保温层、永久层和工作层组成,其中工作层主要由耐火砖人工堆砌而成,堆砌完成后对缝隙处采用耐火泥填补,由于工作层的密闭性直接会对安全生产带来直接影响,因此对砌筑要求也是极高。但是目前行业的钢包砌筑主要都是以人工来完成,且效率低,质量存在不可控的因素,而且人工砌砖填补缝隙容易遗漏,一旦产生钢包穿漏,不仅会带来巨大的经济损失,而且会造成重大安全事故。
技术实现思路
1、有鉴于此,为了解决人工效率低,存在安全隐患等问题,本发明的实施例提供了一种钢包砌筑机器人工作站及方法。
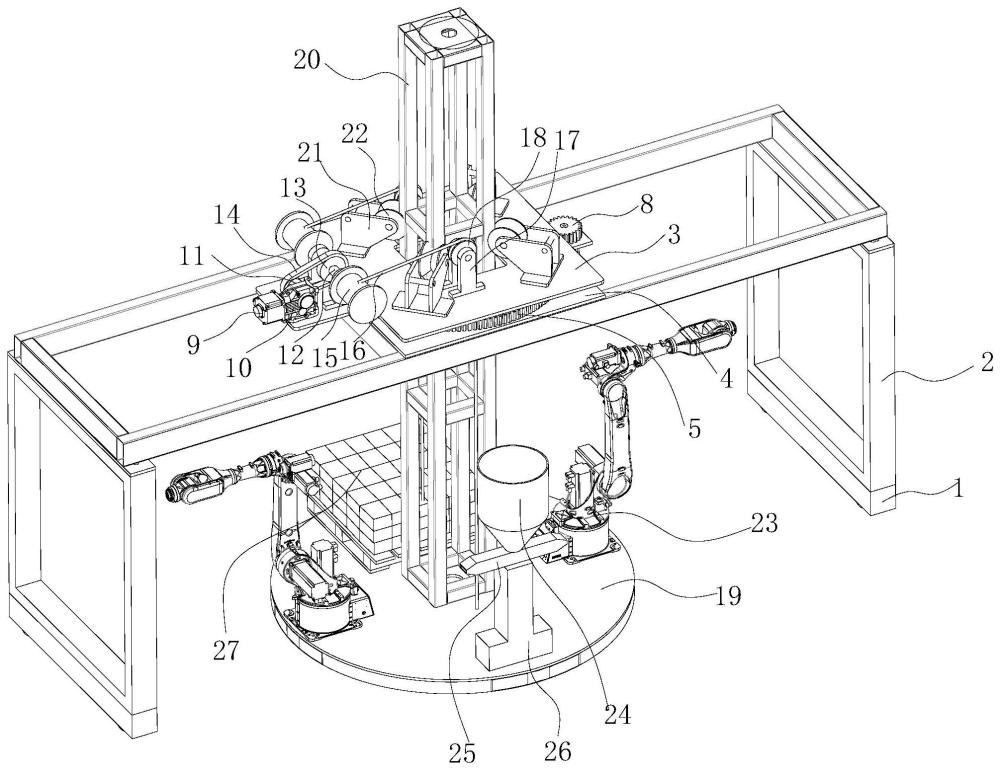
2、本发明的实施例提供的一种钢包砌筑机器人工作站,包括:
3、平移机构;
4、架设在所述平移机构中间的旋转机构,其包括单排球式回转支承和第一驱动器,其中所述单排球式回转支承的上端设有第一安装板、下端设有第二安装板,且所述第一安装板下端面与所述单排球式回转支承外围的齿轮部上端连接,所述第二安装板上端面与所述单排球式回转支承内围的旋转部下端连接、下端面与所述平移机构连接,所述第一驱动器输出端设有第一主动轮且通过所述第一主动轮与所述单排球式回转支承外围的齿轮部外啮合传动连接;
5、设置在所述第一安装板上端面的升降机构,其包括第二驱动器、转动轴、升降井笼、以及两定滑轮,其中所述升降井笼下端自上而下依次穿过所述第一安装板、所述单排球式回转支承、以及所述第二安装板并延伸至下方,所述转动轴可转动的架设在所述第一安装板上端面,且所述转动轴两端分别设有卷筒,所述第二驱动器用以驱动所述转动轴转动,每一所述卷筒上均设有牵引绳,且两所述牵引绳与两所述定滑轮一一对应,每一所述牵引绳一端与对应的所述卷筒连接、另一端通过对应的所述定滑轮并与所述升降井笼下端连接;
6、设置在所述升降井笼下端的砌筑机构,其用以在钢包内自动砌砖。
7、进一步地,所述砌筑机构包括承载盘和两砌砖机械手,其中所述承载盘上端面与所述升降井笼下端固定连接,且每一所述牵引绳远离对应所述卷筒的一端与所述承载盘固定连接,进而与所述升降井笼下端形成连接,两所述砌砖机械手分别对称设置在所述承载盘上端面上,所述承载盘上堆积设有耐火砖物料,两所述砌砖机械手分别用以抓取耐火砖物料用以堆砌钢包内的耐火墙。
8、进一步地,所述砌筑机构还包括砂浆喷涂件,所述砂浆喷涂件包括储浆筒和排浆管,其中所述排浆管下端固定设有支撑柱,且通过所述支撑柱固定架设在所述承载盘上端面,所述储浆筒下端与所述排浆管上端固定连接且相互连通,所述排浆管设有两排浆口,且两所述排浆口分别与两所述砌砖机械手一一对应,每一所述排浆口内设有开关阀。
9、进一步地,所述平移机构包括龙门架和两移动件,其中所述龙门架跨设在所述承载盘上方,且所述旋转机构设置在所述龙门架中间,所述龙门架两端下部分别与两所述移动件固定连接。
10、进一步地,所述平移机构还包括第三驱动器,所述第三驱动器用以驱动两移动件移动,进而带动所述龙门架移动。
11、进一步地,所述第二驱动器固定设置在所述第一安装板上端面,且所述第二驱动器输出端设有第二主动轮,所述转动轴上固定套设有从动轮,所述第二主动轮配备设有传动带,所述传动带的一端套设在所述第二主动轮上、另一端套设在所述从动轮上。
12、进一步地,每一所述牵引绳一端与对应的所述卷筒连接、另一端通过对应的所述定滑轮之后自上而下依次穿过所述第一安装板、所述单排球式回转支承、以及所述第二安装板后与所述承载盘固定连接。
13、进一步地,每一所述定滑轮均通过滑轮座固定安装在所述第一安装板上端面。
14、进一步地,所述第一安装板上端面设有若干个限位轮组,每一所述限位轮组包括支撑座和限位轮,每一所述限位轮可转动架设在对应的所述支撑座上,且每一所述限位轮均与所述升降井笼接触。
15、如上所述的一种钢包砌筑机器人工作站还包括一种操作方法,该方法包括以下步聚:
16、s1、通过外部设置在所述承载盘堆积所述耐火砖物料,随后再向所述储浆筒填充泥浆;
17、s2、通过所述平移机构将所述砌筑机构移动至待工作位置,随后通过所述升降机构调节所述砌筑机构的高度,随后通过所述砌筑机构上的两所述砌砖机械手抓取砖块进行并填涂泥浆后堆砌。
18、本发明的实施例提供的技术方案带来的有益效果是:本发明的一种钢包砌筑机器人工作站及方法,该自动砌筑装置通过升降机构可以将装置升起来,随后通过平移机构将装置整体移动待施工位置,随后再通过旋转机构、升降机构将装置下降至钢包内部,随后通过砌筑机构开始筑起耐火墙;本装置结构简单,施工效率高,可以有效的对各种形状的钢包进行砌筑耐火墙,并且最大程度上降低了施工风险。
技术特征:
1.一种钢包砌筑机器人工作站,该装置位于待砌砖的钢包上方,其特征在于,包括:
2.如权利要求1所述的一种钢包砌筑机器人工作站,其特征在于:所述砌筑机构包括承载盘和两砌砖机械手,其中所述承载盘上端面与所述升降井笼下端固定连接,且每一所述牵引绳远离对应所述卷筒的一端与所述承载盘固定连接,进而与所述升降井笼下端形成连接,两所述砌砖机械手分别对称设置在所述承载盘上端面上,所述承载盘上堆积设有耐火砖物料,两所述砌砖机械手分别用以抓取耐火砖物料用以堆砌钢包内的耐火墙。
3.如权利要求2所述的一种钢包砌筑机器人工作站,其特征在于:所述砌筑机构还包括砂浆喷涂件,所述砂浆喷涂件包括储浆筒和排浆管,其中所述排浆管下端固定设有支撑柱,且通过所述支撑柱固定架设在所述承载盘上端面,所述储浆筒下端与所述排浆管上端固定连接且相互连通,所述排浆管设有两排浆口,且两所述排浆口分别与两所述砌砖机械手一一对应,每一所述排浆口内设有开关阀。
4.如权利要求2所述的一种钢包砌筑机器人工作站,其特征在于:所述平移机构包括龙门架和两移动件,其中所述龙门架跨设在所述承载盘上方,且所述旋转机构设置在所述龙门架中间,所述龙门架两端下部分别与两所述移动件固定连接。
5.如权利要求4所述的一种钢包砌筑机器人工作站,其特征在于:所述平移机构还包括第三驱动器,所述第三驱动器用以驱动两移动件移动,进而带动所述龙门架移动。
6.如权利要求1所述的一种钢包砌筑机器人工作站,其特征在于:所述第二驱动器固定设置在所述第一安装板上端面,且所述第二驱动器输出端设有第二主动轮,所述转动轴上固定套设有从动轮,所述第二主动轮配备设有传动带,所述传动带的一端套设在所述第二主动轮上、另一端套设在所述从动轮上。
7.如权利要求2所述的一种钢包砌筑机器人工作站,其特征在于:每一所述牵引绳一端与对应的所述卷筒连接、另一端通过对应的所述定滑轮之后自上而下依次穿过所述第一安装板、所述单排球式回转支承、以及所述第二安装板后与所述承载盘固定连接。
8.如权利要求1所述的一种钢包砌筑机器人工作站,其特征在于:每一所述定滑轮均通过滑轮座固定安装在所述第一安装板上端面。
9.如权利要求1所述的一种钢包砌筑机器人工作站,其特征在于:所述第一安装板上端面设有若干个限位轮组,每一所述限位轮组包括支撑座和限位轮,每一所述限位轮可转动架设在对应的所述支撑座上,且每一所述限位轮均与所述升降井笼接触。
10.如权利要求1至9所述的一种钢包砌筑机器人工作站还包括一种操作方法,其特征在于,该方法包括以下步聚:
技术总结
本发明提供一种钢包砌筑机器人工作站及方法,属于建筑施工设备技术领域,该装置包括平移机构、旋转机构、升降机构、以及砌筑机构;升降机构设置在旋转机构上并受其旋转控制,砌筑机构设置在升降机构的下端,旋转机构设置在平移机构上,并且砌筑机构上设有耐火砖物料和砂浆喷涂件。该自动砌筑装置通过升降机构可以将装置升起来,随后通过平移机构将装置整体移动待施工位置,随后再通过旋转机构、升降机构将装置下降至钢包内部,随后通过砌筑机构开始筑起耐火墙;本装置结构简单,施工效率高,可以有效的对各种形状的钢包进行砌筑耐火墙,并且最大程度上降低了施工风险;且该操作方法简单、方便,适合普及。
技术研发人员:王小辉,李江华,李红华,李鳌,丁定
受保护的技术使用者:武汉吉森智能技术有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!