一种机器人定位船体构件的方法与流程
本发明属于船体构件加工,具体涉及一种机器人定位船体构件的方法。
背景技术:
1、目前在构件加工领域内的打磨作业自动化水平不高,特别是在船舶小型构件的打磨工作中,需要先把构件人为地放置在自动打磨平台上再由打磨机器人进行自动打磨工作。然而,这种工作方式存在以下缺陷:(1)、不仅工作效率不高且自动化水平低,在打磨工作中产生的噪音和粉尘也会对工作人员的健康产生严重的影响;而且,当多个凌乱布置的构件堆叠时,位于下层的构件阻挡位于上层的构件,使工作人员难以取出转运,影响后续的打磨工作。(2)、在后续打磨工作中,构件需在打磨平台上旋转打磨,构件在打磨平台上的放置位置将会影响后续的打磨效果,将构件人为地放置在打磨平台上,难以定位且保证较佳的打磨效果。
技术实现思路
1、本发明提供一种机器人定位船体构件的方法,该方法能够把凌乱的构件智能化地摆放到打磨平台的指定位置上,并能够起到快速定位和精准定位的效果,从而保证后续打磨工作的有序进行,提高自动化水平和工作效率,克服现有技术中打磨作业方式中存在的缺点和不足。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种机器人定位船体构件的方法,其包括如下步骤:
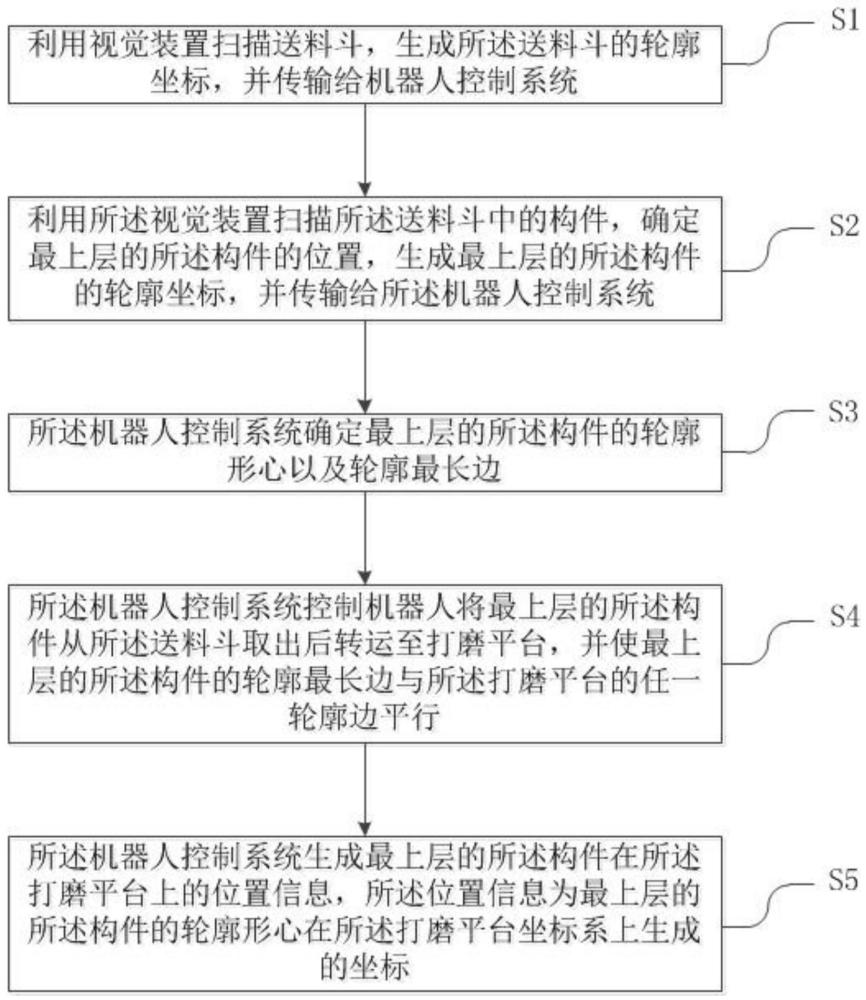
4、步骤s1:利用视觉装置扫描送料斗,生成所述送料斗的轮廓坐标,并传输给机器人控制系统;
5、步骤s2:利用所述视觉装置扫描所述送料斗中的构件,确定最上层的所述构件的位置,生成最上层的所述构件的轮廓坐标,并传输给所述机器人控制系统;
6、步骤s3:所述机器人控制系统确定最上层的所述构件的轮廓形心以及轮廓最长边;
7、步骤s4:所述机器人控制系统控制机器人将最上层的所述构件从所述送料斗取出后转运至打磨平台,并使最上层的所述构件的轮廓最长边与所述打磨平台的任一轮廓边平行;
8、步骤s5:所述机器人控制系统生成最上层的所述构件在所述打磨平台上的位置信息,所述位置信息为最上层的所述构件的轮廓形心在所述打磨平台坐标系上生成的坐标。
9、作为本发明的优选方案,所述送料斗的形状为长方体,所述送料斗的轮廓坐标以及最上层的所述构件的轮廓坐标均在送料斗坐标系中生成;所述送料斗坐标系分别以所述送料斗的长边、短边和高边为x轴、y轴和z轴建立。
10、作为本发明的优选方案,所述打磨平台的形状为长方体,所述打磨平台坐标系分别以所述打磨平台的长边、短边和高边为x轴、y轴和z轴建立。
11、作为本发明的优选方案,所述步骤s4中,最上层的所述构件的轮廓最长边与所述打磨平台坐标系的x轴平行。
12、作为本发明的优选方案,所述打磨平台上设有用于吸附固定构件的电磁吸盘,所述电磁吸盘可转动地连接在所述打磨平台上。
13、作为本发明的优选方案,所述步骤s4中,最上层的所述构件通过履带传输机构从所述送料斗转运至所述打磨平台,所述打磨平台上设有用于拦截构件至所述电磁吸盘的拦截装置。
14、实施本发明提供的一种机器人定位船体构件的方法,与现有技术相比,其有益效果在于:
15、(1)、本发明能够通过具有高度识别功能的视觉装置确定送料斗中最上层的构件的位置,生成最上层的构件的轮廓坐标,并将其传输给机器人控制系统,机器人控制系统将控制机器人将最上层的构件从送料斗转运至打磨平台,并对该构件进行后续的自动打磨工作,相较于现有技术中将构件人为地放置在打磨平台上再由打磨机器人进行自动打磨工作的方式,能够将凌乱的构件智能化且自动化地摆放在打磨平台上,工作效率得到提高,同时也能够避免当送料斗中存在多个构件堆叠的情况时,位于下层的构件阻挡位于上层的构件,导致工作人员难以取出转运,从而影响后续的打磨工作。
16、(2)、本发明的视觉装置将最上层的构件的轮廓坐标传输给机器人控制系统时,机器人控制系统能够确定最上层的构件的轮廓形心和轮廓最长边,通过使最上层的构件的轮廓最长边与打磨平台的任一轮廓边平行,能够减小打磨角度的偏差,从而保证打磨的效果;随后,机器人控制系统生成最上层的构件在打磨平台上的位置信息,位置信息为最上层的构件的轮廓形心在打磨平台坐标系上生成的坐标,能够起到将构件快速定位和精准定位的效果。
技术特征:
1.一种机器人定位船体构件的方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的机器人定位船体构件的方法,其特征在于,所述送料斗的形状为长方体,所述送料斗的轮廓坐标以及最上层的所述构件的轮廓坐标均在送料斗坐标系中生成;所述送料斗坐标系分别以所述送料斗的长边、短边和高边为x轴、y轴和z轴建立。
3.根据权利要求1所述的机器人定位船体构件的方法,其特征在于,所述打磨平台的形状为长方体,所述打磨平台坐标系分别以所述打磨平台的长边、短边和高边为x轴、y轴和z轴建立。
4.根据权利要求3所述的机器人定位船体构件的方法,其特征在于,所述步骤s4中,最上层的所述构件的轮廓最长边与所述打磨平台坐标系的x轴平行。
5.根据权利要求1所述的机器人定位船体构件的方法,其特征在于,所述打磨平台上设有用于吸附固定构件的电磁吸盘,所述电磁吸盘可转动地连接在所述打磨平台上。
6.根据权利要求5所述的机器人定位船体构件的方法,其特征在于,所述步骤s4中,最上层的所述构件通过履带传输机构从所述送料斗转运至所述打磨平台,所述打磨平台上设有用于拦截构件至所述电磁吸盘的拦截装置。
技术总结
本发明公开了一种机器人定位船体构件的方法,其包括如下步骤:S1:扫描送料斗,生成送料斗的轮廓坐标,并传输给机器人控制系统;S2:扫描送料斗中的构件,确定最上层的构件的位置,生成最上层的构件的轮廓坐标,并传输给机器人控制系统;S3:机器人控制系统确定最上层的构件的轮廓形心以及轮廓最长边;S4:机器人控制系统将最上层的构件从送料斗取出后转运至打磨平台,并使最上层的构件的轮廓最长边与打磨平台的任一轮廓边平行;S5:机器人控制系统生成最上层的构件在打磨平台上的位置信息。本发明能够把凌乱的构件智能化地摆放到打磨平台的指定位置上,并能够起到快速定位和精准定位的效果,从而保证后续打磨工作的有序进行。
技术研发人员:何开平,陈正日,陈敦万,罗进友,苏士斌
受保护的技术使用者:中船黄埔文冲船舶有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!