一种原子气室玻壳熔接装置及方法与流程
本发明涉及一种原子气室玻壳熔接装置及方法,属于原子气室加工。
背景技术:
1、原子气室是陀螺仪、磁力仪、原子钟等量子仪表的核心部件,原子气室的性能将直接影响上述仪表的最终精度。原子气室多采用玻璃材质的立方或圆柱形空壳,向其中充入碱金属和填充气体而制成。原子气室玻壳通常利用玻璃管、玻璃片熔接而成。作为量子效应发生的场所,量子仪表对原子气室玻壳提出了微型化(仅数毫米)、低真空漏率、高透光率和高规整度的严苛要求。
2、目前,原子气室玻壳主要靠经验丰富的玻璃工手工操作,利用火焰喷灯(氢氧焰、甲烷焰等)对玻璃件进行加热,一边观察工件的软化熔合效果,一边调整火焰加热点,直至完成熔接过程。熔接过程需要精确控制加热区域和加热温度,一方面要确保熔接区域充分均匀结合无渗漏,另一方面要尽量减少工件的热变形,对操作人员技艺要求较高。此外,玻璃熔接过程加热温度高达1000℃以上,对操作人员带来烧烫伤的安全风险。当前,高水平的玻璃操作工比较稀缺,人工操作生产效率和批次一致性较差,已成为限制原子气室和量子仪表发展的一个重要瓶颈。因此,亟需实现气室玻壳熔接过程的自动化,以适应其批量化生产的需要。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出了一种原子气室玻壳熔接装置及方法,利用五自由度机器人控制火焰的运动速度和轨迹,并通过设定程序控制氢气、氧气供气流量的大小来改变火焰大小和温度,实现原子气室玻壳熔接过程的全自动化。
2、本发明的技术解决方案是:
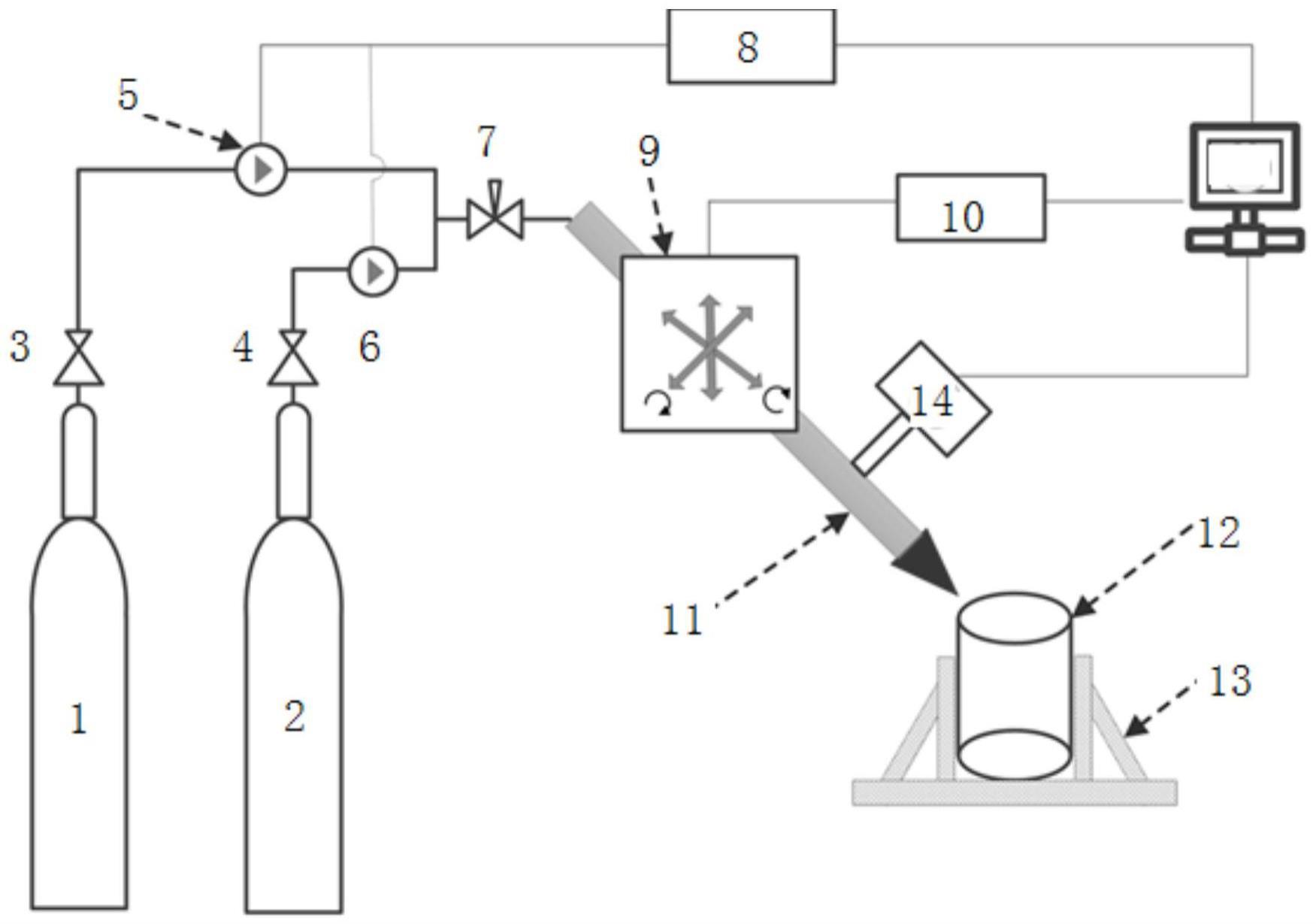
3、一种原子气室玻壳熔接装置包括五自由度机器人、火焰喷灯、气路系统;
4、所述火焰喷灯用于熔接原子气室玻壳,安装在五自由度机器人上;
5、所述五自由度机器人为可编程五轴运动机构,按照设定程序带动火焰喷灯运动;
6、所述气路系统为所述火焰喷灯提供燃烧气体。
7、优选的,所述气路系统包括气瓶、减压表、流量计、单向阀、气体流量控制器;
8、所述气瓶包括氢气瓶和氧气瓶,两个所述减压表分别安装在氢气瓶、氧气瓶出口处;
9、氢气瓶、氧气瓶通过管路支路连接至单向阀后,再经主管路连接至火焰喷灯;
10、在氢气瓶管路支路、氧气瓶管路支路上分别设置流量计,流量计控制管路中氢气、氧气流量并采集瞬时流量数据、累积流量数据,发送至气体流量控制器,气体流量控制器根据设定程序实时调整氢气和氧气的流量大小。
11、优选的,氢气瓶和氧气瓶的纯度均在99.99%以上,气压为0.5~10mpa。
12、优选的,两个减压表分别将氢气和氧气压力降至0.2~0.3mpa。
13、优选的,火焰喷灯利用氢氧燃烧,火焰温度高达2000℃。
14、优选的,五自由度机器人的五个自由度为x,y,z,绕x轴旋转,绕y轴旋转。
15、优选的,还包括热成像仪,实时测量火焰喷灯喷出的火焰温度及原子气室玻壳的温度。
16、优选的,还包括控制模块,与气体流量控制器、热成像仪连接;控制系统实时接收氢气和氧气流量、热成像仪测量得到的温度数据,若温度超限则发出信号至气体流量控制器,控制流量计切断管路中的氢气、氧气,紧急停火。
17、优选的,待熔接原子气室玻壳通过夹持工装进行半刚性固定,夹持工装的材质为石墨。
18、一种原子气室玻壳熔接方法,包括:
19、开启气体流量控制器、热成像仪,确认工作状态和数据传输正常;
20、放置待熔接原子气室玻壳,根据设计要求设定氢气氧气流量、火焰喷灯运动轨迹随时间的变化,编制程序并将程序输入至五自由度机器人中;
21、开启氢气瓶和氧气瓶,调节减压表出口压力,对火焰喷灯进行点火;
22、启动五自由度机器人,开始玻壳熔接过程;在熔接过程中,热像仪实时监控火焰喷灯和待熔接原子气室玻壳温度,若测得温度超限,控制模块向气体流量控制器发出切断氢氧流量的指令,紧急停火;
23、程序运行完成后,关闭气瓶,检查气室玻壳熔接效果。
24、本发明与现有技术相比的优点在于:
25、(1)本发明对玻璃工件进行熔封时,整个熔接过程完全实现自动化,各参数依靠设定程序控制,避免了对操作人员苛刻的技艺要求。
26、(2)本发明对玻璃工件进行熔封时,可以对五自由度机器人进行程序设定,满足不同形状规格工件的熔接需求,具有参数可精确控制、熔接过程温度可视化的优势,能够有效改善熔接效果,提升加工效率,适用于大批量生产。
技术特征:
1.一种原子气室玻壳熔接装置,其特征在于,包括五自由度机器人、火焰喷灯、气路系统;
2.根据权利要求1所述的一种原子气室玻壳熔接装置,其特征在于,所述气路系统包括气瓶、减压表、流量计、单向阀、气体流量控制器;
3.根据权利要求2所述的一种原子气室玻壳熔接装置,其特征在于,氢气瓶和氧气瓶的纯度均在99.99%以上,气压为0.5~10mpa。
4.根据权利要求2所述的一种原子气室玻壳熔接装置,其特征在于,两个减压表分别将氢气和氧气压力降至0.2~0.3mpa。
5.根据权利要求1所述的一种原子气室玻壳熔接装置,其特征在于,火焰喷灯利用氢氧燃烧,火焰温度高达2000℃。
6.根据权利要求1所述的一种原子气室玻壳熔接装置,其特征在于,五自由度机器人的五个自由度为x,y,z,绕x轴旋转,绕y轴旋转。
7.根据权利要求1所述的一种原子气室玻壳熔接装置,其特征在于,还包括热成像仪,实时测量火焰喷灯喷出的火焰温度及原子气室玻壳的温度。
8.根据权利要求7所述的一种原子气室玻壳熔接装置,其特征在于,还包括控制模块,与气体流量控制器、热成像仪连接;控制系统实时接收氢气和氧气流量、热成像仪测量得到的温度数据,若温度超限则发出信号至气体流量控制器,控制流量计切断管路中的氢气、氧气,紧急停火。
9.根据权利要求1所述的一种原子气室玻壳熔接装置,其特征在于,待熔接原子气室玻壳通过夹持工装进行半刚性固定,夹持工装的材质为石墨。
10.一种原子气室玻壳熔接方法,其特征在于,包括:
技术总结
本发明公开了一种基于可编程五自由度机器人的玻璃熔接装置及方法,应用于原子气室制备领域。该装置包括五自由度机器人、火焰喷灯、气路系统。所述火焰喷灯用于熔接原子气室玻壳,安装在五自由度机器人上;所述五自由度机器人为可编程五轴运动机构,按照设定程序带动火焰喷灯运动;所述气路系统为所述火焰喷灯提供燃烧气体,通过程序控制氢气和氧气供气流量大小来改变火焰状态。利用本发明可以实现原子气室玻壳熔接过程的全自动化,能够改善气室玻壳熔接效果和批次一致性、提升生产过程效率,同时避免了对操作人员苛刻的技艺要求,减少了操作人员烧烫伤的安全风险。
技术研发人员:郑建朋,李新坤,王风娇,蔡玉珍,赵雄,韩雪妍,刘院省,王学锋
受保护的技术使用者:北京航天控制仪器研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!