一种基于声场和磁场混合驱动的注射微机器人及控制方法
1.本发明涉及微纳米操作技术领域,具体涉及一种基于声场和磁场混合驱动的注射微机器人及控制方法。
背景技术:
2.显微注射是一种在生物医学研究和医疗保健中起重要作用的技术,因其将内容物从小分子转移到大分子和从细胞器转移到细胞的直接性而受到青睐。
3.但是,细胞注射只能在体外执行,并且注射的效率和成功率不高。由于磁场具有远程操控的功能,所以用磁场来控制药物传递是一种有效的方法。
4.磁性靶向方法主要利用外部磁场将载药的磁行载体输送到目标部位,这些药物载体可以被大量运送到组织/器官。但是,这种方法仅适用于治疗浅表的疾病,对于深部组织具有很高的挑战性,并且未在临床实践中使用。此外,在现有的磁性靶向输送的过程中,输送的药物一般为单个固体,而粉末颗粒或者液体很难输送。因此需要发明一种新的细胞注射装置来克服上述缺点。
5.因此,需要一种在微尺度范围内简单、有效的微机器人和控制方法来实现药物的靶向输送。
技术实现要素:
6.有鉴于此,本发明提供了一种基于声场和磁场混合驱动的注射微机器人及控制方法,能够解决注射控制时驱动力不足以及注射精度难于控制的技术问题。
7.为了解决上述技术问题,本发明是这样实现的。
8.一种基于声场和磁场混合驱动的注射微机器人,包括:
9.圆台(1)、磁化空心圆柱(2)、圆锥形玻璃针头(3);
10.所述圆台的下底面上开有一凹槽,所述凹槽的直径为100-1000μm,深度为200-1000μm,所述圆锥形玻璃针头的底面插入到所述磁化空心圆柱的一端,所述圆台的上底插入所述磁化空心圆柱的另一端;所述圆台的外径与所述磁化空心圆柱的内径相匹配,所述圆锥形玻璃针头3的底面外径与所述磁化空心圆柱的内径相匹配。
11.优选地,所述圆台的材质为柔性树脂,通过3d打印机进行打印成型,圆台的下底面外径为800-1500μm,圆台的高为500-1500μm。
12.优选地,所述磁化空心圆柱的制备方法为:将聚二甲基硅氧烷(pdms)和钕铁硼(ndfeb)微粒按照质量比例为1:1-1.5进行混合,混合后注入到玻璃成型模具中,注入完成后在60-70℃的温度下进行固化成型,固化时间为20-30min,固化完成后脱模得到空心圆柱,得到的空心圆柱放置在1.5-2.0t的磁场中进行磁化,磁化时间为5-10min,得到磁化空心圆柱,磁化空心圆柱中的磁矩垂直于其轴线;磁化空心圆柱的内径为400-1000μm,外径为500-1200μm,长度为2000-5000μm。
13.优选地,所述圆锥形玻璃针头的制备方法为:获取所述圆锥形玻璃针头的目标尺
寸,通过加热玻璃移液管,并由拉针仪对加热后的玻璃移液管进行拉伸,通过控制拉力和温度来控制拉伸熔断后所形成的圆锥形玻璃针头的尺寸。
14.优选地,所述钕铁硼微粒为钕铁硼磁性纳米粒子,是铁磁性纳米粒子。
15.优选地,所述微机器人尾部的凹槽由柔性树脂打印而成。
16.一种基于声场和磁场混合驱动的注射微机器人的控制方法,使用如前所述的微机器人,所述控制方法包括以下步骤:
17.步骤s1:在底部带有压电陶瓷片的培养皿中放置培养液和待注射药物,并将盛有培养液及待注射药物的培养皿放置于带有磁场的环境中,所述待注射药物不溶于培养液;将所述注射微机器人放置于所述培养液中,培养液在圆台的凹槽开口处在表面张力的作用下形成气泡;
18.步骤s2:给压电陶瓷片通电,压电陶瓷片产生声场,所述气泡在压电陶瓷片产生的声场中振动,通过振动驱动所述注射微机器人向前运动,通过调整磁场的方向调整所述注射微机器人的前进方向;
19.步骤s3:当所述注射微机器人到达所述待注射药物时,所述压电陶瓷片断电,所述注射微机器人停止向前运动,此时给所述注射微机器人施加一z轴方向的磁场,通过调整所述z轴方向的磁场,实现对所述磁化空心圆柱的挤压及恢复变形,使得所述待注射药物被吸收到所述磁化空心圆柱中;z轴方向是指与培养皿垂直的方向;
20.步骤s4:向所述压电陶瓷片通电,所述注射微机器人继续向前运动,直至待注射细胞位于所述磁化空心圆柱的一侧,且所述待注射细胞表面与所述磁化空心圆柱的表面的距离不超过100-500μm,给所述压电陶瓷片断电;
21.步骤s5:施加x-z平面或y-z平面的旋转磁场,所述注射微机器人在旋转磁场的作用下进行旋转,所述注射微机器人在培养液中旋转时,培养液中会产生局部涡流,所产生的局部涡流带动所述待注射细胞旋转使得所述待注射细胞的注射点位于所述注射微机器人的中心轴上,当旋转到预设角度时,关闭所述旋转磁场,注射机器人和所述待注射细胞均停止转动;所述x-z平面、y-z平面均为世界坐标系下垂直于水平面的两个平面,x-z平面平行于x轴及z轴,y-z平面平行于y轴及z轴,z轴垂直于水平面,x轴平行于所述待注射细胞中心点所在切面且与z轴垂直,y轴平行于所述待注射细胞中心点所在切面且与z轴垂直。
22.有益效果:
23.本发明通过施加超声场来驱动凹槽的气泡震动,从而来驱动注射机器人向前运动。通过施加磁场来控制机器人的方向、旋转运动、挤压运动,实现方向可控、非接触旋转、注射控制。
24.具有以下技术效果:
25.(1)本发明注射微机器人具有磁矩,既可以控制注射微机器人的方向,又可以在旋转磁场中以非接触的方式高速旋转待接收注射的生物目标,减少对目标的伤害。
26.(2)本发明通过气泡驱动的方式,提高了注射微机器人注射的驱动力,使注射操作可以有效进行。
27.(3)本发明注射微机器人的制作过程,具有实现方式简单、操作快速、耗时短、可重复性高、注射力大、位姿可控等诸多优点,有效控制了注射微机器人,有利于后续注射机器人对生物目标,特别是对生物微目标的注射,能够显著提高操作效率。
28.(4)本发明的控制方法,使细胞注射不再局限于体外,也提高了细胞注射的效率和成功率,对微纳操作领域具有十分重要的意义。
附图说明
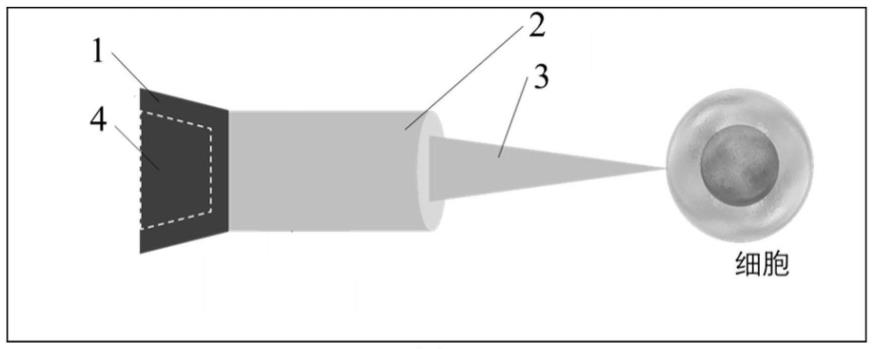
29.图1为本发明提供的基于声场和磁场混合驱动的注射微机器人的结构示意图。
30.图2为本发明提供的注射微机器人的玻璃针头的制作过程示意图。
31.图3为本发明提供的空心圆柱磁化过程的示意图。
32.图4为本发明提供的以非接触的方式旋转待接收注射的生物目标的示意图。
33.图5为本发明提供的注射微机器人的空心圆柱挤压的形变示意图。
34.附图说明:
35.1:圆台,2:磁化空心圆柱,3:圆锥形玻璃针头,4:凹槽
具体实施方式
36.下面结合附图和实施例,对本发明进行详细描述。
37.如图1-图2所示,本发明提出了一种基于声场和磁场混合驱动的注射微机器人,包括:
38.圆台1、磁化空心圆柱2、圆锥形玻璃针头3。
39.所述圆台1的下底面上开有一凹槽4,所述凹槽4的直径为100-1000μm,深度为200-1000μm,所述圆锥形玻璃针头3的底面插入到所述磁化空心圆柱2的一端,所述圆台1的上底插入所述磁化空心圆柱2的另一端;所述圆台1的外径与所述磁化空心圆柱2的内径相匹配,所述圆锥形玻璃针头3的底面外径与所述磁化空心圆柱2的内径相匹配。
40.进一步地,所述圆台1的材质为柔性树脂,通过3d打印机进行打印成型,圆台1的下底面外径为800-1500μm,圆台1的高为500-1500μm。
41.进一步地,如图3所示,所述磁化空心圆柱2的材质的原料包括聚二甲基硅氧烷(pdms)和钕铁硼(ndfeb)微粒,钕铁硼(ndfeb)微粒的粒径为3-10μm。所述磁化空心圆柱2的制备方法为:将聚二甲基硅氧烷(pdms)和钕铁硼(ndfeb)微粒按照质量比例为1:1-1.5进行混合,混合后注入到玻璃成型模具中,注入完成后在60-70℃的温度下进行固化成型,固化时间为20-30min,固化完成后脱模得到空心圆柱,得到的空心圆柱放置在1.5-2.0t的磁场中进行磁化,磁化时间为5-10min,得到磁化空心圆柱,磁化空心圆柱中的磁矩垂直于其轴线;磁化空心圆柱的内径为400-1000μm,外径为500-1200μm,长度为2000-5000μm。
42.进一步地,所述圆锥形玻璃针头3的制备方法为:获取所述圆锥形玻璃针头3的目标尺寸,通过加热玻璃移液管,并由拉针仪对加热后的玻璃移液管进行拉伸,通过控制拉力的大小和温度的高低来控制拉伸熔断后所形成的圆锥形玻璃针头3的尺寸。
43.由于玻璃移液管为毛细玻璃管,其自身尺寸较大,不满足注射的针尖要求。要制作圆锥形玻璃针头3就需要对毛细玻璃管进行一定的处理,使毛细玻璃管末端变得细长。本发明采用的方法是在毛细玻璃管的两端施加拉力,与此同时在玻璃管的中部加热到一定的温度。玻璃管的中部会因为温度的升高硬度变小,可塑性增强,因此容易拉伸成为尖端。在这个过程中,通过控制拉力的大小和温度的高低来控制拉伸熔断后所形成的末端的尺寸。操作所获得的毛细玻璃管具备了进行微纳操作的尺寸条件,利用拉针仪来实现。利用拉针仪
内部部件的重力作为作用在毛细玻璃管两端的拉力,通过铂金电阻进行加热。
44.所述圆锥形玻璃针头3的底面内径为10-100μm,底面外径为200-1000μm,圆锥形玻璃针头的长度为1000-5000μm。
45.所述圆台1、磁化空心圆柱2、以及圆锥形玻璃针头3通过ab胶组装。
46.本发明由所述压电陶瓷片及电磁系统组成控制系统,所述电磁系统包括6个电磁铁。所述压电陶瓷片产生声场,所述电磁系统产生x、y、z方向的均匀磁场,可以产生xy平面、xz平面以及yz平面内任意方向的磁场,其中,微机器人响应磁场进行方向调整,其次,微机器人通过旋转来调整待注射的细胞的位姿,然后,施加z轴方向的磁场时,磁化后的微机器人可以实现挤压恢复运动,从而实现药物的吸入与释放。
47.所述注射微机器人的圆锥形玻璃针头由玻璃管加热拉伸得到,能够扎入细胞;所述磁化空心圆柱2由聚二甲基硅氧烷(pdms)和钕铁硼(ndfeb)微粒(直径为5μm)制成,并且在1.5t的磁场中垂直轴线磁化,负责细胞的位姿调整和药物的吸入、输出;圆台的凹槽主要提供气泡,气泡在生产中震荡来提供驱动力。
48.通过在xy平面施加不同方向的磁场来控制机器人的方向,然后施加一个声场来使微型机器人向前运动,当机器人靠近细胞时再施加一个旋转磁场使机器人旋转带动细胞旋转来调节位姿,旋转最后施加一个z轴的磁场,微型机器人产生挤压运动。
49.所述注射微机器人的磁性空腔具有磁矩,磁矩可以驱动所述注射微机器人跟着磁场变化来调节方向、旋转运动以及挤压空腔;凹槽可以在液体中形成气泡,气泡在声场中震动来驱动机器人向前运动;所述电磁系统用于产生磁场来调整所述注射微机器人的位姿以及挤压空腔,所述压电陶瓷片用于产生气泡振动的声场,所述注射微机器人在声场中运动到达目的地以及驱动所述注射微机器人。
50.当施加一个xy平面的磁场时,所述注射微机器人可以在xy平面上调整运动方向;当给压电陶瓷片施加一个时变电场时,尾部凹槽的气泡高速振动推进机器人向前运动;当施加一个绕y轴旋转的磁场时,所述注射微机器人可以绕着y轴旋转来带动细胞旋转,来对细胞进行姿态调整;当施加z轴方向的磁场时,所述注射微机器人发生挤压运动。
51.进一步地,所述钕铁硼微粒为钕铁硼磁性纳米粒子,是铁磁性纳米粒子。
52.进一步地,所述微机器人尾部凹槽由柔性树脂打印而成。
53.进一步地,所述微机器人的圆锥形玻璃针头在高温下制备而成。
54.如图4-图5所示,本发明提出了一种基于声场和磁场混合驱动的注射微机器人的控制方法,使用如前所述的注射微机器人,所述控制方法包括以下步骤:
55.步骤s1:在底部带有压电陶瓷片的培养皿中放置培养液和待注射药物,并将盛有培养液及待注射药物的培养皿放置于带有磁场的环境中,所述待注射药物不溶于培养液;将所述注射微机器人放置于所述培养液中,培养液在圆台的凹槽开口处在表面张力的作用下形成气泡;
56.本实施例中,所述待注射药物不溶于培养液,所述待注射药物可以为粉状物或固体。
57.步骤s2:给压电陶瓷片通电,压电陶瓷片产生声场,所述气泡在压电陶瓷片产生的声场中振动,通过振动驱动所述注射微机器人向前运动,通过调整磁场的方向调整所述注射微机器人的前进方向;
58.步骤s3:当所述注射微机器人到达所述待注射药物时,所述压电陶瓷片断电,所述注射微机器人停止向前运动,此时给所述注射微机器人施加一z轴方向的磁场,通过调整所述z轴方向的磁场,实现对所述磁化空心圆柱的挤压及恢复变形,使得所述待注射药物被吸收到所述磁化空心圆柱中;z轴方向是指与培养皿垂直的方向;
59.本实施例中,通过施加z轴方向的磁场,对所述磁化空心圆柱进行挤压;除去z轴方向的磁场使磁化空心圆柱恢复形状。
60.步骤s4:向所述压电陶瓷片通电,所述注射微机器人继续向前运动,直至待注射细胞位于所述磁化空心圆柱的一侧,且所述待注射细胞表面与所述磁化空心圆柱的表面的距离不超过100-500μm,给所述压电陶瓷片断电;
61.步骤s5:施加x-z平面或y-z平面的旋转磁场,所述注射微机器人在旋转磁场的作用下进行旋转,所述注射微机器人在培养液中旋转时,培养液中会产生局部涡流,所产生的局部涡流带动所述待注射细胞旋转使得所述待注射细胞的注射点位于所述注射微机器人的中心轴上,当旋转到预设角度时,关闭所述旋转磁场,注射机器人和所述待注射细胞均停止转动;所述x-z平面、y-z平面均为世界坐标系下垂直于水平面的两个平面,x-z平面平行于x轴及z轴,y-z平面平行于y轴及z轴,z轴垂直于水平面,x轴平行于所述待注射细胞中心点所在切面且与z轴垂直,y轴平行于所述待注射细胞中心点所在切面且与z轴垂直。
62.进一步地,给压电陶瓷片断电,给注射装置施加一z方向的磁场,通过调整所述z轴方向的磁场,对磁化空心圆柱进行挤压,使药物被注射到细胞内部。
63.本发明实施例1提供了一种注射微机器人的制备方法。具体过程为:
64.步骤1,由于毛细玻璃管自身尺寸较大,不满足注射的针尖要求。要制作可进行注射的末端执行器就需要对毛细玻璃管进行一定的处理,使毛细玻璃管末端变得细长。本发明采用的方法是在毛细玻璃管的两端施加拉力,与此同时在玻璃管的中部加热到一定的温度。玻璃管的中部会因为温度的升高硬度变小,可塑性增强,因此容易拉伸成为尖端。在这个过程中,可以通过控制拉力的大小和温度的高低来控制拉伸熔断后所形成的末端的尺寸。操作所获得的毛细玻璃管具备了进行微纳操作的尺寸条件。这一步骤可以利用拉针仪来实现。利用拉针仪内部部件的重力作为作用在毛细玻璃管两端的拉力,通过铂金电阻进行加热。
65.步骤2,首先取相同质量的pdms溶液和ndfeb粉末搅拌至黑色均匀的粘稠状液体,再加入质量比为10:1的固化剂,得到ndfeb/pdms混合溶液。然后将ndfeb/pdms混合溶液注入到模具中。再将注入ndfeb/pdms混合溶液的模具放到70℃的恒温炉三十分钟,使ndfeb/pdms混合溶液固化。去除模具,得到一个空心圆柱。最后将空心圆柱放置在1.5t磁场中其进行磁化,使空心圆柱中的磁矩垂直于轴线。
66.步骤3,将步骤1、2制作的玻璃针尖和空心圆柱以及用3d打印机打印的凹槽用ab胶进行组装。将组装的注射机器人放入液体中,排除机器人中的空气,另外,凹槽处会形成一个气泡。
67.步骤4,在液体环境中,先施加一个磁场来调整机器人的方向。其次,打开超声场,气泡在超声场中振动推动机器人向前运动。当机器人到达药物处时,通过施加一个z轴的磁场挤压和恢复变形来将药物吸到机器人内部。控制机器人向细胞前进,在快到达细胞附近时改变机器人的方向使机器人运动到细胞旁边,施加一个旋转磁场来旋转细胞,改变其位
姿。再控制机器人使其将针尖扎入到细胞中,施加一个z方向的磁场,使空心圆柱挤压,将药物注射到细胞中。
68.本发明采用的磁场和声场相结合的方法,将磁场的快速响应特性和声场的大驱动力应用在体内外的细胞注射的控制。具体来说就是,采用拉伸熔断毛细玻璃管使其末端的尺度符合注射的要求;磁场除了控制运动的方向还可以使机器人做旋转运动来非接触旋转细胞,另外,磁场还可以使空心圆柱产生挤压-恢复变形来提供药物;声场负责前进的动力,使其对沉积在底部的微小目标也可以进行有效操作;磁场和声场有效的提高了细胞注射的控制的精准度。
69.以上的具体实施例仅描述了本发明的设计原理,该描述中的部件形状,名称可以不同,不受限制。所以,本发明领域的技术人员可以对前述实施例记载的技术方案进行修改或等同替换;而这些修改和替换未脱离本发明创造宗旨和技术方案,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1