一种全自动细胞培养系统及其方法
1.本发明属于细胞制备系统,具体涉及一种全自动细胞培养系统及其方法。
背景技术:
2.细胞治疗作为生物技术中新兴的研究方向,其临床疗效获得了广泛认可,细胞治疗及其相关产业迎来快速发展时期。作为细胞治疗生物技术中最核心和基础的细胞培养技术,研究者们也提出了新的需求。
3.当前细胞培养技术主要通过人工手动培养生产,随着细胞治疗等相关产业的快速发展,细胞培养的产能急需扩大。在规模化扩大产能时,人工手动细胞培养面临着巨大挑战,比如高额的人工费、培训费和设施建设成本,同时还存在细胞品质的不稳定性和不均一性等问题。因此,越来越多的研究者开始关注自动化细胞培养设备。然而,当前的自动化细胞培养设备大部分是半自动化生产,无法满足全过程细胞培养的自动化生产,且难以满足不同细胞培养生产的适应性和拓展性。
4.因此,有必要设计一种全自动细胞培养系统,实现全自动培养细胞,满足自动化细胞培养系统的生产效率、生产质量以及设备的紧凑和操作简单化等要求。
技术实现要素:
5.针对现有技术中存在的问题和不足,本发明的目的旨在提供一种全自动细胞培养系统及其方法。
6.为实现发明目的,本发明采用的技术方案如下:本发明第一方面提供一种全自动细胞培养系统,包括:输入单元,用于将物料输入至换液单元;换液单元,用于放置换液或传代过程所需的物料;六自由度柔性机械臂,用于细胞培养过程中物料的夹持转移和移液、换液操作;水浴离心单元,用于对细胞冻存管进行水浴加热和离心;检测单元,用于对细胞的数据采集和分析;培养单元,用于细胞培养;冻存单元,用于将细胞进行冻存;转运单元,用于细胞培养皿在培养单元、检测单元、冻存单元和六自由度柔性机械臂之间的转运。
7.进一步地,所述换液单元包括电动多道移液器工作头、移液器吸头箱和试剂箱,所述电动多道移液器工作头、移液器吸头箱和试剂箱有固定位置。
8.进一步地,所述六自由度柔性机械臂的末端连接有可拆卸式夹爪工作头,移液和换液时六自由度柔性机械臂与电动多道移液器工作头连接。
9.进一步地,所述转运单元包括旋转转运托盘,所述旋转转运托盘有固定的旋转轨道和方向。
10.更进一步地,所述旋转轨道和方向为:培养单元
→
检测单元
→
六自由度柔性机械臂
→
检测单元
→
培养单元
→
六自由度柔性机械臂
→
检测单元
→
六自由度柔性机械臂
→
检测单元
→
培养单元
→
检测单元
→
六自由度柔性机械臂。
11.进一步地,所述输入单元包括快速灭菌传递舱和无菌试剂传递管道,所述快速灭菌传递舱和无菌试剂传递管道用于物料的输入及灭菌。
12.进一步地,所述全自动细胞培养系统还包括输出单元,所述输出单元用于用于将封装好的细胞冻存管转移出所述全自动细胞培养系统以及收集培养过程中产生的废料。
13.更进一步地,所述输出单元包括快速灭菌传递舱和废料存储模块,所述快速灭菌传递舱用于物料的输出及灭菌处理,所述废料存储模块用于存储已用耗材以及试剂。
14.进一步地,所述水浴离心单元包括旋盖器、水浴装置和离心机,所述旋盖器用于对细胞冻存管进行开或关盖。
15.进一步地,所述检测单元包括超高清电子显微镜、cmos相机和介质分析传感器,所述超高清电子显微镜和cmos相机用于观测细胞的生长状态和细胞密度,所述介质分析传感器用于自动采集葡萄糖、乳酸和ph值和分析数据。
16.进一步地,所述培养单元包括co2恒温培养箱、培养皿放置柜和冻存管放置柜。
17.进一步地,所述冻存单元包括-80℃、-20℃、4℃三个温度等级的冰箱组。
18.进一步地,所述全自动培养系统还包括电控单元,所述电控单元包括工业计算机、控制模块和电源模块,负责培养系统数据的储存和分析、各单元的的控制和供电。
19.本发明第二方面还提供一种上述全自动细胞培养系统的培养方法,包括以下步骤:(n1)细胞复苏:六自由度柔性机械臂将输入单元输入的细胞冻存管转移至水浴离心单元进行解冻、离心,再将细胞转移至培养单元进行培养;(n2)细胞换液和传代:转运单元将细胞培养皿转运至检测单元进行细胞生长状态和细胞密度的观测,检测后转运单元再将细胞培养皿转运至六自由度柔性机械臂位置,根据观测结果,六自由度柔性机械臂进行换液或传代操作,完成换液或传代操作后,转运单元将细胞培养皿转移至培养单元继续培养;(n3)细胞采收和冻存:转运单元和六自由度柔性机械臂相互配合,将培养后的细胞进行采收并转运至冻存单元进行冻存。
20.进一步地,步骤n1的具体操作包括:(n1.1)输入单元将物料传递至换液单元,所述物料包括细胞冻存管、细胞培养基、胰酶、pbs缓冲液、细胞冻存液、细胞培养皿、移液器吸头;(n1.2)六自由度柔性机械臂将存放待培养细胞的细胞冻存管转移至水浴离心单元的水浴装置中进行水浴解冻;(n1.3)六自由度柔性机械臂将解冻后的细胞冻存管转移至水浴离心单元的离心机中进行离心,离心结束后弃去上清液,并补加细胞培养基;(n1.4)六自由度柔性机械臂将离心后的细胞转移至培养单元的细胞培养皿中,再将细胞培养皿夹持至培养单元的co2恒温培养箱中进行培养。
21.更进一步地,步骤(n1.4)中六自由度柔性机械臂将离心后的细胞转移至培养单元的细胞培养皿后,还需要转运单元将细胞培养皿转移至检测单元进行检测,观测细胞状态,
检测后转运单元再将细胞培养皿转移至培养单元,六自由度柔性机械臂将细胞培养皿移至co2恒温培养箱中进行培养。
22.进一步地,步骤n2的具体操作为:(n2.1)六自由度柔性机械臂取出在co2恒温培养箱中的细胞培养皿,转运单元将细胞培养皿转运至检测单元下,观测细胞生长状态及细胞密度;(n2.2)当检测单元观测到细胞密度低于80%时,转运单元将细胞培养皿转运至六自由度柔性机械臂位置,六自由度柔性机械臂进行弃废液、pbs缓冲液清洗、加入细胞培养基的操作,转运单元再将细胞培养皿转运至培养单元继续培养;(n2.3)当检测单元观测到细胞密度达到80%-90%时,转运单元将细胞培养皿转移至六自由度柔性机械臂位置,六自由度柔性机械臂进行弃废液、pbs缓冲液清洗、加入胰酶的操作,转运单元将细胞培养皿转移至检测单元,观测细胞形态;(n2.4)当检测单元观测到细胞收缩变圆时,转运单元将细胞培养皿转移至六自由度柔性机械臂位置,六自由度柔性机械臂进行移出胰酶、加入细胞培养基、吹打细胞的操作,制备细胞悬液,并按照设置的传代比例将细胞悬液分配到新的细胞培养皿;(n2.5)六自由度柔性机械臂将所有细胞培养皿中均添加细胞培养基后,转运单元将细胞培养皿转移至培养单元中继续培养。
23.进一步地,步骤n3的具体操作包括:(n3.1)六自由度柔性机械臂将co2恒温培养箱中的细胞培养皿取出,转运单元将细胞培养皿转移至检测单元,观测细胞生长情况和细胞密度;(n3.2)检测单元检测到数值合格后,转运单元转移至六自由度柔性机械臂位置,六自由度柔性机械臂进行弃废液、pbs缓冲液清洗、胰酶消化和细胞培养基吹打的操作,制成细胞悬液;(n3.3)六自由度柔性机械臂夹持培养单元的冻存管放置柜中的冻存管置于离心机中,并将细胞悬液转移至细胞冻存管,进行离心、弃废液、加入冻存液、封装的操作;(n3.4)六自由度柔性机械臂将封装好的冻存管依次移动至4℃冰箱中保存20分钟,-20℃冰箱中保存30分钟,-80℃冰箱中保存12小时。
24.与现有技术相比,本发明的有益效果如下:1. 本发明提供了一种全自动细胞培养系统,通过六自由度柔性机械臂和转运单元将输入的细胞运转于水浴离心单元、换液单元、培养单元、检测单元、冻结单元和输出单元之间,实现了细胞培养过程中细胞复苏、细胞换液、细胞传代、细胞采收冻存的全流程自动化操作,系统操作简单,且培养过程中系统自动监测培养数据,无需人工额外操作及相关培训,较大程度提高了培养效率。
25.2. 本发明提供的全自动细胞培养系统可以最多同时培养10种细胞,在一种细胞置于培养箱时可以同时进行其他细胞的培养操作,并且本系统24小时连续工作可进行约150次全流程细胞培养,培养量是人工处理量的近3倍,能够实现连续生产工作,提高工作效率,降低人员的劳动强度。
26.3. 本发明提供的全自动细胞培养系统为细胞培养过程提供无菌环境,检测单元中超高清电子显微镜、cmos相机和介质分析传感器能够及时自动检测细胞生长状态和分析细胞培养数值,满足了细胞培养全流程自动化的需求,提高了细胞培养过程的质量和效率,
保证了培养细胞的合格率。
附图说明
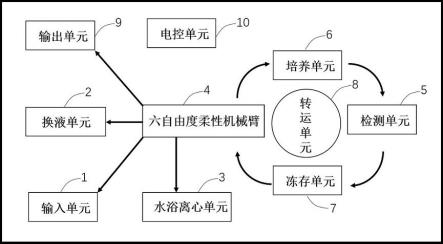
27.图1为本发明具体实施例提供的一种全自动细胞培养系统的结构框图,包括1 输入单元,2 换液单元,3 水浴离心单元,4 六自由度柔性机械臂,5检测单元,6 培养单元,7 冻存单元,8 转运单元,9 输出单元,10 电控单元;图2-图5为本发明实例2提供的一种全自动细胞培养方法的流程图。
具体实施方式
28.为了使本领域技术人员能够更加清楚地了解本发明的技术方案,以下将结合具体的实施例详细说明本发明的技术方案,具体实施方式,请参见图1-5。
29.实施例1:一种全自动细胞培养系统如图1所示,本实施例提供了一种全自动细胞培养系统,包括输入单元1、换液单元2、水浴离心单元3、六自由度柔性机械臂4、检测单元5、培养单元6、冻存单元7、转运单元8、输出单元9和电控单元10;其中,输入单元1包括快速灭菌传递舱和无菌试剂传递管道,用于将细胞冻存管、细胞培养基、胰酶、pbs缓冲液、细胞冻存液、细胞培养皿、移液器吸头等物料输入至换液单元2;换液单元2包括电动多道移液器工作头、移液器吸头箱和各种所需试剂箱,用于放置换液或传代过程所需的物料;水浴离心单元3包括旋盖器、水浴装置和离心机,用于冻存管的开或关盖、水浴加热以及离心操作;六自由度柔性机械臂4,可以分别连接夹爪工作头或多通道电动移液器工作头,用于物料的夹持转移和移液、换液操作;检测单元5包括超高清电子显微镜、cmos相机和介质分析传感器,所述超高清电子显微镜和cmos相机用于观测细胞的生长状态和细胞密度,所述介质分析传感器用于自动采集葡萄糖、乳酸和ph值和分析数据;培养单元6包括co2恒温培养箱和培养皿放置柜和冻存管放置柜,用于细胞培养及放置未使用的培养皿和冻存管;冻存单元7包括-80℃、-20℃、4℃三个温度等级的冰箱组;转运单元8包括旋转转运托盘,负责细胞培养皿在培养单元6、检测单元5、冻存单元7和六自由度柔性机械臂4之间的转运;输出单元9包括快速灭菌传递舱和废料存储模块,所述快速灭菌传递舱用于物料的输出及灭菌处理,所述废料存储模块用于存储已用耗材以及试剂;电控单元10包括工业计算机、控制模块和电源模块,负责培养系统数据的储存和分析、各单元的的控制和供电。
30.实施例2:一种实施例1所述的全自动细胞培养系统的方法本实施例提供了一种全自动细胞培养方法,所述方法如图2所示,包括:(n1)细胞复苏:六自由度柔性机械臂将输入单元输入的细胞冻存管转移至水浴离
心单元进行解冻、离心,再将离心后的细胞转移至培养单元进行培养;(n2)细胞换液和传代:转运单元将细胞培养皿转运至检测单元进行细胞生长状态和细胞密度的观测,检测后转运单元再将细胞培养皿转运至六自由度柔性机械臂位置,根据观测结果,六自由度柔性机械臂进行换液或传代操作,完成换液或传代操作后,转运单元将细胞培养皿转移至培养单元继续培养;(n3)细胞采收和冻存:转运单元和六自由度柔性机械臂相互配合,将培养后的细胞进行采收并转运至冻存单元进行冻存。
31.1、细胞复苏对于上述步骤n1,其具体操作如图3所示,包括:(n1.1)输入单元将物料传递至换液单元,所述物料包括细胞冻存管、细胞培养基、胰酶、pbs缓冲液、细胞冻存液、细胞培养皿、移液器吸头;(n1.2)六自由度柔性机械臂将存放待培养细胞的细胞冻存管转移至水浴离心单元的水浴装置中进行水浴解冻;(n1.3)六自由度柔性机械臂将解冻后的细胞冻存管转移至水浴离心单元的离心机中进行离心,离心结束后弃去上清液,并补加细胞培养基;(n1.4)六自由度柔性机械臂将离心后的细胞转移至培养单元的细胞培养皿中,再将细胞培养皿夹持至培养单元的co2恒温培养箱中进行培养。
32.步骤n1.1-n1.4更具体的操作为:利用六自由度柔性机械臂4将通过输入单元1输入的细胞冻存管迅速夹持到水浴离心单元3的水浴装置中解冻一分钟左右,然后六自由度柔性机械臂4将冻存管夹持到水浴离心单元3的离心机中固定,采用密度梯度离心法进行离心操作,水浴离心单元3的旋盖器从离心机上方落下并将冻存管开盖,同时六自由度柔性机械臂4从培养单元6的培养皿放置柜中夹持一个培养皿放置到所述转运单元8的转运托盘上;六自由度柔性机械臂4将夹爪工作头更换为多通道电动移液器头,移动到离心机上方,吸取离心后的冻存管中的冻存液,移动到输出单元9的废料存储模块排出废液,然后移动到输入单元1吸取适量细胞培养基到冻存管中,反复吹打细胞后将冻存管中的液体转移到转运单元8转运托盘上的培养皿中,再补加一些细胞培养基,移液前要在换液单元2的移液器吸头箱更换吸头;六自由度柔性机械臂4将电动多道移液器头更换为夹爪工作头,之后六自由度柔性机械臂4移动到培养皿上方盖好培养皿盖,转运单元8的转运托盘轻微转动将培养皿中细胞摇匀,摇匀之后,转运托盘旋转将培养皿移动到检测单元5下进行检测,然后转运托盘旋转将培养皿移动到培养单元6前,六自由度柔性机械臂4打开培养单元6的co2恒温培养箱之后将培养皿放入进行培养。
33.、细胞换液和传代对于上述步骤n2,其具体操作如图4所示,包括:(n2.1)六自由度柔性机械臂取出在co2恒温培养箱中的细胞培养皿,转运单元将细胞培养皿转运至检测单元下,观测细胞生长状态及细胞密度;(n2.2)当检测单元观测到细胞密度低于80%时,转运单元将细胞培养皿转运至六自由度柔性机械臂位置,六自由度柔性机械臂进行弃废液、pbs缓冲液清洗、加入细胞培养
基的操作,转运单元再将细胞培养皿转运至培养单元继续培养;(n2.3)当检测单元观测到细胞密度达到80%-90%时,转运单元将细胞培养皿转移至六自由度柔性机械臂位置,六自由度柔性机械臂进行弃废液、pbs缓冲液清洗、加入胰酶的操作,转运单元将细胞培养皿转移至检测单元,观测细胞形态;(n2.4)当检测单元观测到细胞收缩变圆时,转运单元将细胞培养皿转移至六自由度柔性机械臂位置,六自由度柔性机械臂进行移出胰酶、加入细胞培养基、吹打细胞的操作,制备细胞悬液,并按照设置的传代比例将细胞悬液分配到新的细胞培养皿;(n2.5)六自由度柔性机械臂将所有细胞培养皿中均添加细胞培养基后,转运单元将细胞培养皿转移至培养单元中继续培养。
34.步骤n2.1-n2.5更具体的操作为:根据当前培养细胞的代谢速度设置好合适的时间,取出在co2恒温培养箱中的细胞培养皿,通过转运单元8将细胞培养皿移动到检测单元5下,通过机器视觉分析细胞生长情况及细胞密度,通过介质分析传感器自动分析葡萄糖、乳酸和ph值,根据分析结果来控制选择下步操作。
35.当细胞密度不到80%时,进行换液操作;所述转运单元8将细胞培养皿移动到靠近六自由度柔性机械臂4,六自由度柔性机械臂4将夹爪工作头更换为电动多道移液器头,吸出细胞培养皿中的废液移至废料存储模块,然后吸取适量pbs缓冲液清洗细胞培养皿,清洗完成后吸出细胞培养皿中剩余的液体并移至废料存储模块,接着向细胞培养皿中加入适量细胞培养基,通过转运单元8将细胞培养皿移动到检测单元5下观测细胞状态,若无异常则六自由度柔性机械臂4更换为夹持工作头,将细胞培养皿夹持到co2恒温培养箱中继续培养。
36.当细胞密度达到80%-90%时,进行细胞传代操作;所述转运单元8将细胞培养皿移动到靠近六自由度柔性机械臂4,根据培养需求设定传代比例,根据传代比例从培养皿放置柜中取出相应数量的细胞培养皿备用。所述六自由度柔性机械臂4更换为电动多道移液器头,吸出细胞培养皿中的废液移至所述废料存储模块,然后吸取适量pbs缓冲液清洗细胞培养皿,清洗完成后吸出细胞培养皿中剩余的液体移至废料存储模块,接着向细胞培养皿中加入适量胰酶,通过转运单元8将细胞培养皿移动到检测单元5下,观测细胞形态。
37.通过机器视觉分析大部分细胞收缩变圆后,转运单元8将细胞培养皿移动到靠近六自由度柔性机械臂4,吸出胰酶移至废料存储模块,所述六自由度柔性机械臂4吸取适量细胞培养基,然后控制电动多道移液器头轻轻均匀吹打细胞成细胞悬液。最后根据传代比例将细胞悬液分配到新的细胞培养皿,加入细胞培养基后,通过转运单元8将所有细胞培养皿移动到检测单元5下观测细胞状态,若无异常则六自由度柔性机械臂4更换为夹持工作头,将所有细胞培养皿夹持到co2恒温培养箱中继续培养。
38.3、细胞采收和冻存对于上述步骤n3,其具体操作如图5所示,包括:(n3.1)六自由度柔性机械臂将co2恒温培养箱中的细胞培养皿取出,转运单元将细胞培养皿转移至检测单元,观测细胞生长情况和细胞密度;(n3.2)检测单元检测到数值合格后,转运单元转移至六自由度柔性机械臂位置,六自由度柔性机械臂进行弃废液、pbs缓冲液清洗、胰酶消化和细胞培养基吹打的操作,制
成细胞悬液;(n3.3)六自由度柔性机械臂夹持培养单元的冻存管放置柜中的冻存管置于离心机中,并将细胞悬液转移至细胞冻存管,进行离心、弃废液、加入冻存液、封装的操作;(n3.4)六自由度柔性机械臂将封装好的冻存管依次移动至4℃冰箱中保存20分钟,-20℃冰箱中保存30分钟,-80℃冰箱中保存12小时。
39.步骤n3.1-3.4更具体的操作为:从co2恒温培养箱中取出培养一定时间的细胞培养皿,通过所述转运单元8将细胞培养皿移动到检测单元5下,通过机器视觉分析细胞生长情况及细胞密度,通过介质分析传感器自动分析葡萄糖、乳酸和ph值,分析是否培养成功,数值合格后则开始细胞采收操作。
40.所述六自由度柔性机械臂4夹持所需数量的冻存管至离心机中,冻存管通过旋盖器开盖后备用,所述转运单元8将细胞培养皿移动到靠近六自由度柔性机械臂4,所述六自由度柔性机械臂4更换为电动多道移液器头,吸出细胞培养皿中的废液移至所述废料存储模块,然后吸取适量pbs缓冲液清洗细胞培养皿,清洗完成后吸出细胞培养皿中剩余的液体移至废料存储模块,向细胞培养皿中加入适量胰酶进行消化,消化后吸出胰酶移至所述废料存储模块,六自由度柔性机械臂4吸取适量细胞培养基,然后控制电动多道移液器头轻轻均匀吹打细胞成细胞悬液。
41.所述六自由度柔性机械臂4将细胞悬液移液至离心机中备用的冻存管内,旋盖器将冻存管关盖后进行离心操作,离心完成后旋盖器将冻存管开盖,六自由度柔性机械臂4吸出冻存管中上层废液至废料存储模块,然后向冻存管中加入冻存液,旋盖器将冻存管关盖封装,之后六自由度柔性机械臂4更换为夹持工作头,将冻存管移动至冻存单元7的4℃冰箱中保存,20分钟后取出再移动到-20℃冰箱中保存,30分钟后取出在-80℃冰箱中保存,12小时后取出通过所述输出单元9将冻存管转移出系统。
42.此外,本发明可以根据不同细胞以及不同需求来设置不同的培养时间和传代比例等,扩大本系统的适用范围。
43.以上所述仅是本发明的部分较佳实例,任何熟悉本领域的技术人员均可利用以上阐述的技术方案加以修改或将其修改为等同的技术方案,因此,依据本发明的技术方案所进行的任何简单修改或等同置换,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1