三维微孔可控调节柔性复合材料、柔性应力传感器及其制备方法
本发明涉及柔性电子,具体而言,涉及三维微孔可控调节柔性复合材料、柔性应力传感器及其制备方法。
背景技术:
1、随着物联网与可穿戴技术的发展,柔性电子器件是未来发展的主流趋势。与传统的刚性电子产品相比,柔性电子产品更柔软,可以为电子系统提供更好的生物相容性。其中,柔性应力传感器是柔性电子器件发展的关键单元,近年来受到人们的广泛关注。
2、近年来在柔性应力传感器的应用领域内,研究者们通过设计不同微结构提高传感器灵敏度,包括金字塔结构、微柱结构、微裂纹结构、微孔结构、互锁结构等等,传感器灵敏度飞速提升。但是,随着研究的深入,研究者们发现灵敏度过高会导致传感器的检测量程减小,并且研究者们发现,高灵敏度与宽量程难以兼容在同一个传感器中,这种情况大大缩减了传感器的应用范围。
技术实现思路
1、本发明主要解决的技术问题是提供一种三维微孔可控调节柔性复合材料,使用一维导电填料的协同导电网络,使得应用在传感器中时,导电填料在聚合物中均匀分散,提高了传感器的导电稳定性。
2、为达到上述目的,本发明采用的技术方案是:一种三维微孔可控调节柔性复合材料,由多壁碳纳米管、二甲基硅油、双组份室温硫化硅橡胶、含氢硅氧烷、107硅橡胶和铂金催化剂组成,且所述多壁碳纳米管的质量百分含量为1.2-1.5%,剩余原料的质量比如下:二甲基硅油:双组分室温硫化硅橡胶:含氢硅氧烷:107硅橡胶:铂金催化剂=20:20:20:2:2:1。
3、本发明的第二个目的在于提供所述的三维微孔可控调节柔性复合材料的制备方法,所述制备方法具体包括如下步骤:
4、s1、将多壁碳纳米管加入正己烷溶剂中,超声分散后得到溶液a;
5、s2、将双组份室温硫化硅橡胶中的b胶与二甲基硅油加入步骤s1制得的溶液a中,混合均匀后得到溶液b;
6、s3、将溶液b烘干溶剂得到复合导电材料;
7、s4、将双组份室温硫化硅橡胶中的a胶、含氢硅氧烷、107硅橡胶、铂金催化剂依次加入步骤s3得到的复合导电材料中,机械搅拌后倒入模具中,经过固化处理后得到三维微孔可控调节柔性复合材料。
8、作为优选,所述步骤s1中,多壁碳纳米管与正己烷溶剂的质量比为1:(1000-1500)。
9、作为优选,所述步骤s1中,超声分散处理的条件如下:超声功率为480w,超声分散处理的频率为开2s、关4s,总时长为10-15min。
10、作为优选,所述步骤s2中,双组份室温硫化硅橡胶中的b胶与多壁碳纳米管的质量比为500:(0.6-1.4)。
11、作为优选,所述步骤s3中,烘干温度为90℃,烘干时间为5-10h。
12、作为优选,所述步骤s4中,机械搅拌处理的转速为100-1000rpm,机械搅拌处理的时间为10-15min。
13、作为优选,所述步骤s4中,固化温度为25-60℃,固化时间为2-3h。
14、本发明的第三个目的在于提供一种柔性应力传感器,包括敏感层,敏感层由三维微孔可控调节柔性复合材料制得。
15、本发明的第四个目的在于提供一种柔性应力传感器的制备方法,所述制备方法具体包括如下步骤:将三维微孔可控调节柔性复合材料加入到3d打印机中,通过3d打印技术在导电布上打印三维模型,打印完成之后粘上导电布,得到柔性应力传感器。
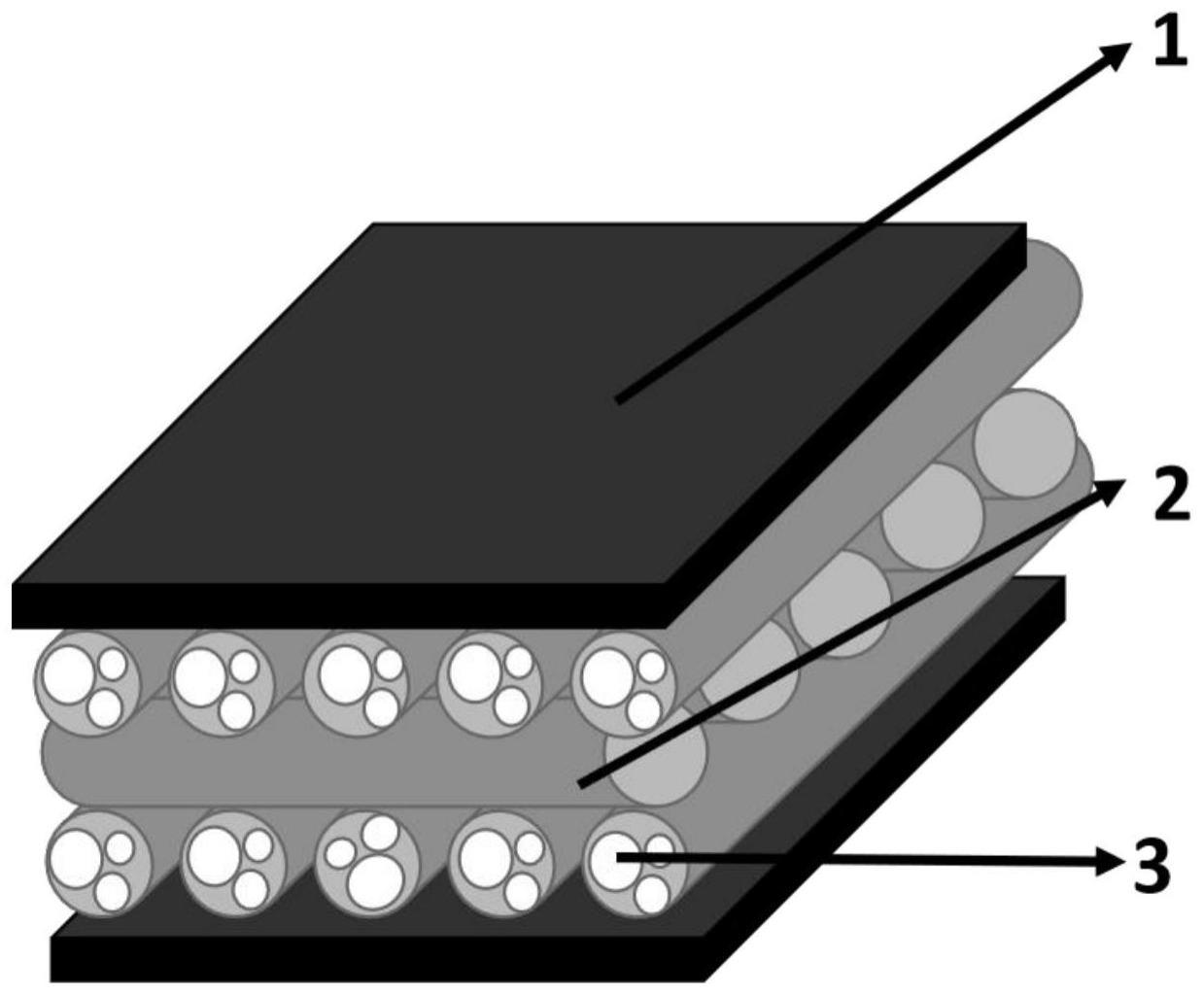
16、本发明制得的柔性应力传感器工作原理为:
17、当压力作用于该柔性应力传感器上表面时,柔性基体内部的微孔受到压力会被压缩,内部孔隙上下接触形成导电回路,由于内部存在梯度孔,当力较小时,较大的孔会先被压缩,当压力逐渐增大,较小的孔开始被压缩,形成导电回路,因此该传感器具有较宽的检测量程。
18、与现有技术相比,本发明具有如下优点:其一、本发明提供的制备方法使用了一维导电填料的协同导电网络,使得传感器的导电填料在聚合物中均匀分散,提高了传感器的导电稳定性,由于存在梯度微孔结构,受到压力时该传感器的检测范围会有较大提升,由于采用3d打印技术制备柔性应力传感器,受到压力时结构更容易发生变化,导电回路也会相应发生改变,灵敏度也会更高。相较于其他盐、糖类牺牲模板制造多孔结构相比,该制备方法能够控制孔的大小以及孔隙率。
19、其二、本发明提供的微孔结构可控调节的柔性应力传感器具有高弹性、高灵敏度、宽检测量程、稳定性好、制备成本低廉、制作方法简便、等特点;不需要精密微纳结构设计,适用于人体运动或其他生理信号的实时监测,具有较高市场价值。
技术特征:
1.一种三维微孔可控调节柔性复合材料,其特征在于,由多壁碳纳米管、二甲基硅油、双组份室温硫化硅橡胶、含氢硅氧烷、107硅橡胶和铂金催化剂组成,且所述多壁碳纳米管的质量百分含量为1.2-1.5%,剩余原料的质量比如下:二甲基硅油:双组分室温硫化硅橡胶:含氢硅氧烷:107硅橡胶:铂金催化剂=20:20:20:2:2:1。
2.一种如权利要求1所述的三维微孔可控调节柔性复合材料的制备方法,其特征在于,所述制备方法具体包括如下步骤:
3.如权利要求2所述的三维微孔可控调节柔性复合材料的制备方法,其特征在于,所述步骤s1中,多壁碳纳米管与正己烷溶剂的质量比为1:(1000-1500)。
4.如权利要求2所述的三维微孔可控调节柔性复合材料的制备方法,其特征在于,所述步骤s1中,超声分散处理的条件如下:超声功率为480w,超声分散处理的频率为开2s、关4s,总时长为10-15min。
5.如权利要求2所述的三维微孔可控调节柔性复合材料的制备方法,其特征在于,所述步骤s2中,双组份室温硫化硅橡胶中的b胶与多壁碳纳米管的质量比为500:(0.6-1.4)。
6.如权利要求2所述的三维微孔可控调节柔性复合材料的制备方法,其特征在于,所述步骤s3中,烘干温度为90℃,烘干时间为5-10h。
7.如权利要求2所述的三维微孔可控调节柔性复合材料的制备方法,其特征在于,所述步骤s4中,机械搅拌处理的转速为100-1000rpm,机械搅拌处理的时间为10-15min;
8.如权利要求2所述的三维微孔可控调节柔性复合材料的制备方法,其特征在于,所述步骤s4中,固化温度为25-60℃,固化时间为2-3h。
9.一种柔性应力传感器,其特征在于,包括敏感层,所述敏感层由权利要求1所述的三维微孔可控调节柔性复合材料制得。
10.一种如权利要求9所述的柔性应力传感器的制备方法,其特征在于,所述制备方法具体包括如下步骤:采用如权利要求2-8任一所述的制备方法制备三维微孔可控调节柔性复合材料,将三维微孔可控调节柔性复合材料加入到3d打印机中,通过3d打印技术在导电布(1)上打印三维模型,打印完成之后粘上导电布(1),得到柔性应力传感器。
技术总结
本发明提供了一种三维微孔可控调节柔性复合材料,由多壁碳纳米管、二甲基硅油、双组份室温硫化硅橡胶、含氢硅氧烷、107硅橡胶和铂金催化剂组成,且多壁碳纳米管的质量百分含量为1.2‑1.5%,剩余原料的质量比如下:二甲基硅油:双组分室温硫化硅橡胶:含氢硅氧烷:107硅橡胶:铂金催化剂=20:20:20:2:2:1,本发明还提供了上述三维微孔可控调节柔性复合材料的制备方法,本发明还提供了一种包括三维微孔可控调节柔性复合材料的柔性应力传感器及其制备方法,与现有技术相比,本发明提供的制备方法使用了一维导电填料的协同导电网络,使得传感器的导电填料在聚合物中均匀分散,提高了传感器的导电稳定性。
技术研发人员:尚杰,张琦,高志一,夏湘岭,胡思齐,汪松,李润伟
受保护的技术使用者:中国科学院宁波材料技术与工程研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!