活细胞原位维持系统中多波长荧光延时成像和氧气浓度控制装置及方法与流程
本发明涉及活细胞原位维持系统,尤其是涉及活细胞原位维持系统中多波长荧光延时成像和氧气浓度控制装置及方法。
背景技术:
1、活细胞是生命体基本结构单位和功能单位。细胞生物学通过整合分子生物学,深入到超微结构的水平,主要研究细胞的生长、代谢、蛋白表达量变化和遗传等生物学过程。当前,在细胞生物学、生命科学与相关医学研究领域中,细胞生物学实验是经常涉及到的重要环节,且对单个活细胞的实时观测与分析具有重要意义。为了长时间实时连续的监测细胞内相关蛋白表达变化,常需荧光成像系统对其实时原位追踪,有时需要对多种蛋白表达水平同时进行成像表征。
2、然而,当前的细胞原位培养装置在体积和结构上难以实现与多激发光波长荧光成像系统进行低成本的整合,且通常不能同时实现实时原位的氧气浓度控制。国外的活细胞工作站系统是将所有的荧光激发系统、成像系统以及载物台培养系统与显微镜系统整合到一个系统中,价格昂贵,售后维修成本高等,难以满足个性化模块化的领域用途和低成本高性价比的需求。
3、因此,发明一种可模块化组装以及个性化定制,且能够和常规显微镜匹配组合使用的、集成多波长荧光成像和氧气浓度实时控制为一体的活细胞原位维持系统及方法非常必要。
技术实现思路
1、本发明的目的是提供活细胞原位维持系统中多波长荧光延时成像和氧气浓度控制装置及方法,用于细胞体外培养并且能够实现细胞原位实时显微观测,且实现了集成化原位观测载物台细胞培养器内荧光激发光的自动精准转换,通过与荧光激发光遮光板的自动化定时开闭相配合,同时结合实时控制的氧气浓度的可编程控制,能够实现对活细胞内蛋白的原位实时荧光观测,并可分析得出氧气浓度的实时变化对活细胞内蛋白表达的定量影响规律。
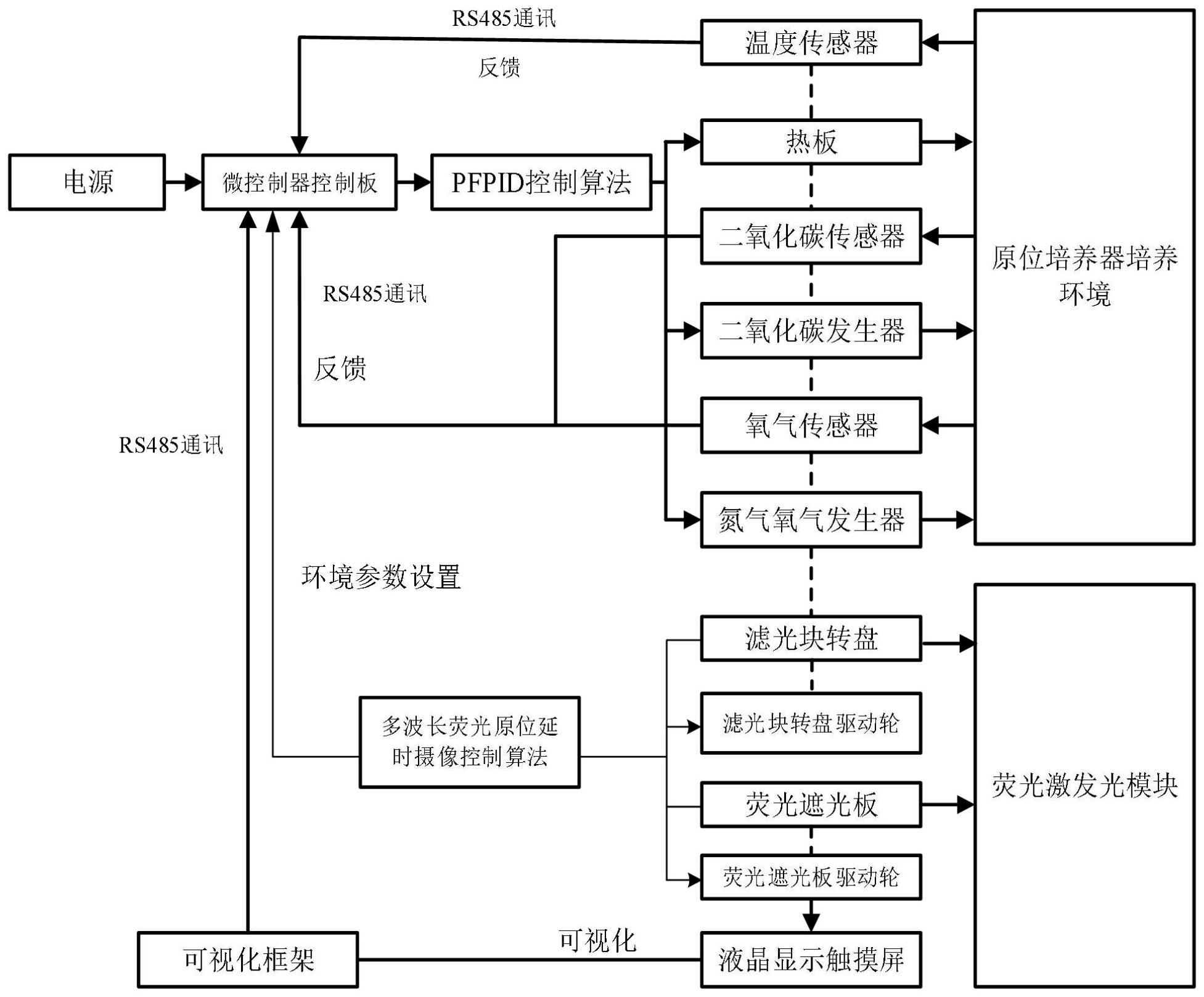
2、为实现上述目的,本发明提供了活细胞原位维持系统中多波长荧光延时成像和氧气浓度控制装置及方法,包括电源、微控制器控制板、多波长激发光转换系统、原位培养器培养环境控制系统。
3、所述多波长激发光转换系统包括滤光块转盘、滤光块转盘驱动轮、荧光遮光板、荧光遮光板驱动轮;所述滤光块转盘沿圆周方向均匀分布若干档位,若干所述档位均设有位置定位卡位,所述滤光块转盘外缘为轮齿结构,且与所述滤光块转盘驱动轮外缘轮齿啮合。
4、所述荧光遮光板转盘与所述显微镜的荧光遮光板拨动短杆固定连接,且所述荧光遮光板转盘的外缘与所述荧光遮光板拨动短杆一样沿着弧形圆周方向移动;所述荧光遮光板驱动轮的外缘轮齿与所述荧光遮光板转盘的外缘的轮齿啮合。
5、所述微控制器控制板对所述多波长激发光转换系统、所述原位培养器培养环境控制系统发送指令并驱动其运动,所述多波长激发光转换系统设置多波长荧光原位延时摄像控制算法,所述原位培养器培养环境控制系统设置pfpid算法。
6、所述原位培养器培养环境控制系统包括温度控制系统、二氧化碳浓度控制系统和氧气浓度控制系统。
7、优选的,所述滤光块转盘外缘为设置周期性月牙状缺口的齿轮轮廓,所述月牙状缺口与所述滤光块转盘驱动轮外缘相啮合;所述滤光块转盘内部边缘设置第一弹性簧片和第二弹性簧片。
8、优选的,所述滤光块转盘驱动轮通过连杆与定位滚轮连接,所述连杆一端与所述滤光块转盘驱动轮的滚动中心轴承芯固定连接,所述连杆另一端与所述滤光块转盘的轴承芯固定连接;
9、所述定位滚轮沿所述滤光块转盘上的斜坡滚动,所述斜坡为“人”字型,其中部最高位置处设有凹槽,所述凹槽内部设置弹簧顶块,所述弹簧顶块与所述凹槽之间通过弹簧连接。
10、优选的,所述滤光块转盘圆周外围具有向心长槽与碗型缺口的周期性组合结构,且分别与所述滤光块转盘驱动轮的凸起柱和半环形凸起结构相配合进行相对机械滑动。
11、优选的,所述滤光块转盘和所述滤光块转盘驱动轮之间设置精密光电限位开关;所述精密光电限位开关包括定位激光发射端、定位激光接收端、定位激光穿过孔,所述定位激光穿过孔设置于所述滤光块转盘一侧内部。
12、优选的,所述氧气浓度控制系统分为低氧模式和高氧模式,低氧模式时,通过模糊比例-积分-微分系统控制输入氮气的量以控制氧气浓度;高氧模式时,通过模糊比例-积分-微分系统控制输入氧气的量以控制氧气浓度。
13、活细胞原位维持系统中多波长荧光延时成像方法,包括以下步骤:
14、(1)将活细胞置于活细胞原位维持装置中,设定温度和二氧化碳浓度,等待温度和二氧化碳浓度达到稳定;
15、(2)设定氧气的浓度,获得氧气浓度随时间变化的曲线;
16、(3)在液晶触摸屏设定荧光延时摄像的模式,选择n种激发光波长,设定原位拍照的间隔时间、序列拍照的总时长;
17、(4)滤光块转盘驱动轮驱动滤光块转盘转动到波长1对应的的位置;
18、(5)荧光遮光板驱动轮驱动荧光遮光板转盘转动到使得遮光板打开的位置;(6)向相机发出拍照出发信号,相机拍照,然后向微控制器发出拍照完成的信号;
19、(7)滤光块转盘转动到波长的位置,重复步骤(6),滤光块转盘1转动到波长3的位置,重复步骤(6),…直到滤光块转盘1转动到波长n的位置,重复步骤(6),然后关闭遮光板;
20、(8)等待间隔时间后,重复步骤(4)-(7);
21、(9)通过与遮光板的自动化定时开闭相配合,对氧气浓度进行程序化实时控制,对活细胞内蛋白的原位实时荧光观测,分析得出氧气浓度的实时变化对活细胞内蛋白表达的定量影响规律。
22、活细胞原位维持系统中氧气浓度控制的方法包括:
23、氧气浓度控制采用基于前馈的模糊pid控制,基于前馈的模糊pid控制本质上是pfc(predictivefunctionalcontrol,预测函数控制)和pid的一个融合,即pfpid;前馈部分由预测模型模块和误差校正模块组成,预测模型模块采用一阶模型来预测过程的未来输出值,误差校正模块用于修正模型的预测误差。
24、具体过程如下:具体过程如下:将模糊pid控制的输出值传递给pfc的预测模型,离散化得到差值方程,定义当前步数为k,定义预测的未来步数增量为p,进而输出一个预测值ymav=(k+p),然后对输出值进行修正并计算模型误差,最后得到校正后的预测值yp=(k+p);
25、在pfpid的基础上,输出量y(k)与实际过程中的模型不匹配或者遇到干扰时,将y(k)的值传递给预测模型,预测模型为:
26、
27、其中,k是稳态增益;t是时间常数;τ是滞后时间;
28、利用零阶保持器将该一阶模型离散化后得到差值方程模型为:
29、ym(k+1)=amym(k)+km(1-am)u(k-l)
30、其中,ts是采样时间;l是τm/ts;
31、在pfc中,pfpid控制系统的结构表示为一些基函数的组合:
32、u(k+i)=u(k),i=1,2
33、在pfc的基础上,根据模型当前的信息和未来的控制行动得到输出预测结果;因此,令l=0,可以预测未来的p步输出,其递推公式如下所示:
34、
35、其中,是自由响应;u(k)是阶跃响应;是被迫响应。
36、因此,本发明采用上述结构的活细胞原位维持系统中多波长荧光延时成像和氧气浓度控制装置及方法,具有如下技术效果:
37、(1)本发明对滤光块转盘和荧光遮光板转盘分别设置驱动轮,并通过微控制器控制板和多波长荧光原位延时摄像控制算法对滤光块转盘驱动轮、荧光遮光板驱动轮进行控制,实现对多波长激发光转换系统的控制;
38、(2)本发明在控制多波长激发光转换系统,得到n种激发光波长下的活细胞内蛋白的原位实时荧光观测的同时,可以得到氧气浓度的实时变化曲线,从而分析出氧气浓度的实时变化对活细胞内蛋白表达的定量影响规律;
39、(3)微控制器控制板通过pfpid算法实现对氧气浓度的实时控制,具有平衡速度快、抗干扰能力强、响应速度快等特点;
40、(4)本发明将多波长荧光激发成像和氧气浓度实时控制集成在活细胞原位维持系统中,具有模块切换灵活、成本低以及便于功能衍生的特点。
41、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!