一种细胞移取方法和细胞移取系统与流程
本公开属于生物,更具体地,涉及一种细胞移取方法和细胞移取系统。
背景技术:
1、随着计算机技术以及控制技术的发展,相关用户可借助计算机设备在机器人的协助下执行细胞移取任务,该用于协助执行细胞移取过程的机器人可称为细胞操作机器人,利用人机交互软件,即可在计算机设备上控制细胞操作机器人执行相应的细胞移取工作。
2、许多专利申请文件中已经对现有主流的细胞移取方法进行了披露,其中:
3、公开号cn113403431a的公开是响应于取液指令,控制机器人将吸取管向细胞取液点进行第一移动,吸取管进入显微镜视野画面后,根据显微镜视野画面呈现的吸取管与细胞取液点的接近程度控制机器人减缓第一移动的移动速度,该移动速度的减缓程度与接近程度呈正相关,显微镜视野画面显示吸取管到达细胞取液点时,将吸取管当前所在的位置设为取液预定位置,记录用户操作机器人使吸取管从取液预定位置向细胞取液点进行第二移动所产生的取液位移信息,响应于取液回退指令,根据取液位移信息控制机器人将吸取管从当前所在的位置回退至取液预定位置。
4、公开号cn113771030a的公开是获取用户指示细胞操作机器人执行的细胞操作任务,获取该用户在该细胞操作任务下的操作习惯信息,根据该操作习惯信息确定适用于该细胞操作任务的移动轨迹和角度,然后控制细胞操作机器人按照该移动轨迹将吸取管移动至目标位置以及控制该细胞操作机器人使吸取管到达目标位置时与预设平面形成前述角度。
5、公开号cn113524194a的公开提供了一种基于多模特征深度学习的机器人视觉抓取系统的目标抓取方法,提出采用双目视觉的方法确定目标物体的深度和二维坐标信息,然后采用d-h参数逆解得到机械手臂的旋转角度,从而自动化抓取到目标物体。
6、然而,上述专利申请中记载的细胞移取方法都存在一些不可忽略的缺陷:cn113403431a公开的方法需要手动调整机器人吸取管到达具体位置,操作过程复杂;cn113771030a公开的方法只能保证吸取管按照记录信息,移动到常用操作位置,该位置唯一且固定,不同操作用户有不同操作习惯,该方法不能应对不同操作用户的习惯,以及不同细胞的不同位置,实用性差;cn113524194a公开的方法并未考虑机械手臂有些地方不可到达,并且抓取过程会改变其他目标物体的位置,从而导致细胞移取操作准确率偏低。
7、公开内容
8、针对现有技术的以上缺陷或改进需求,本公开提供了一种细胞移取方法和系统,其目的在于,解决现有移取过程会改变其他目标细胞的位置,从而导致细胞移取操作准确率偏低的技术问题。
9、为实现上述目的,按照本公开的一个方面,提供了一种细胞移取方法,包括:
10、(1)获取起始grid中心点、移取装置的吸取控制信息、移取装置的释放控制信息;所述吸取信息由第一细胞容器和所述移取装置决定;所述释放控制信息由所述第二细胞容器和所述移取装置决定;
11、(2)获取所述第一细胞容器内的目标区域的所有grid图像,并利用获取的所有grid图像对第一细胞容器内的所有细胞进行检测、排序,以获得排序后的多个目的细胞的信息;
12、(3)获取步骤(2)排序后的所有目的细胞中的第一个目的细胞对应的grid图像,将该目的细胞的中心位置移动至所述起始grid中心点的位置,控制所述移取装置根据所述吸取信息进行细胞吸取,控制所述移取装置根据所述释放信息进行细胞释放;
13、(4)拍摄步骤(2)中下一目的细胞所在grid,以获取一张grid图像,判断该下一个目的细胞是否位于该grid图像中,如果是则进入步骤(5),否则进入步骤(6);
14、(5)根据步骤(2)获取的grid图像和步骤(4)获取的grid图像,将下一个目的细胞移动至起始grid中心点的位置,控制所述移取装置根据所述吸取信息进行细胞吸取,控制所述移取装置根据所述释放信息进行细胞释放;
15、(6)针对步骤(2)排序后所有剩余的目的细胞而言,重复上述步骤(4)到步骤(6),直到所有目的细胞都处理完毕为止。
16、优选地,所述细胞移取方法应用于细胞移取设备,所述细胞移取设备包括:底座、成像装置、所述移取装置、运送装置和放置装置;所述成像装置、所述移取装置、所述运送装置和所述放置装置固定在所述底座上;所述运送装置可移动的设置在所述底座上,可用于带动所述第一细胞容器根据目的细胞中心点与起始grid中心点的位置关系移动;所述放置装置用于放置所述第二细胞容器。
17、优选的,所述成像装置为显微镜,所述运送装置为载物台,所述放置装置为放置台,所述第一细胞容器为细胞培养皿,所述第二细胞容器为多孔板。
18、优选的,所述移取装置为机器人,所述机器人包括固定设置在所述底座上的机器人基座、可活动地设置在所述机器人基座上的机械手臂、以及被所述机械手臂夹持并用于吸取细胞的吸取管。
19、优选的,所述机械手臂内设有多个转动轴和跟随所述转动轴运动的连杆。
20、优选的,放置装置固定设置在移取装置与运送装置之间,运送装置上设置有第一细胞容器,放置装置上设置有第二细胞容器。
21、优选的,步骤(1)包括:(1-1)获取所述成像装置的起始grid中心点、在机器人基座的世界坐标系中的位置信息,以及第二细胞容器的中心在机器人基座的世界坐标系中的位置信息;
22、(1-2)获取机械手臂的所有连杆的dh参数信息构成的dh参数信息列表;
23、(1-3)根据步骤(1-2)得到的dh参数信息列表,以及步骤(1-1)得到的所述成像装置的拍照起始grid中心点在机器人基座世界坐标系中的位置信息,并利用逆解计算获取机械手臂的每个连杆的转动角度a0;
24、(1-4)根据步骤(1-2)得到的dh参数信息列表,以及步骤(1-1)得到的第二细胞容器的中心在机器人基座的世界坐标系中的位置信息,并利用逆解计算得到机械手臂的每个连杆的转动角度a1;
25、其中,所述移取装置的吸取控制信息包括所述机械手臂的每个连杆的转动角度a0和所述吸取管吸取细胞的控制信息;所述移取装置的释放控制信息包括所述机械手臂的每个连杆的转动角度a1和所述吸取管释放细胞的控制信息。
26、优选的,所述吸取管上设置有吸取针;
27、步骤(3)中控制所述移取装置根据所述吸取信息进行细胞吸取这一过程具体为控制所述机械手臂中的每个连杆自动转换到步骤(1-3)确定的转动角度a0,并控制所述吸取针到达该目的细胞所在位置,执行细胞吸取操作;
28、步骤(3)中控制所述移取装置根据所述释放信息进行细胞释放这一过程具体为控制所述机械手臂中的每个连杆自动转换到步骤(1-4)确定的转动角度a1,并控制所述吸取针到达第二细胞容器所在位置,执行细胞放置操作。
29、优选的,所述吸取管上设置有吸取针;
30、步骤(5)中将下一个目的细胞移动至起始grid中心点的位置,控制所述移取装置根据所述吸取信息进行细胞吸取这一过程具体为,控制所述机械手臂中的每个连杆自动转换到步骤(1-3)确定的转动角度a0,并控制所述吸取针到达该目的细胞所在位置,执行细胞吸取操作;
31、步骤(5)中控制所述移取装置根据所述释放信息进行细胞释放这一过程具体为,控制所述机械手臂中的每个连杆自动转换到步骤(1-4)确定的转动角度a1,并控制吸取针到达第二细胞容器所在位置,执行细胞放置操作。
32、优选的,所述细胞移取方法包括:
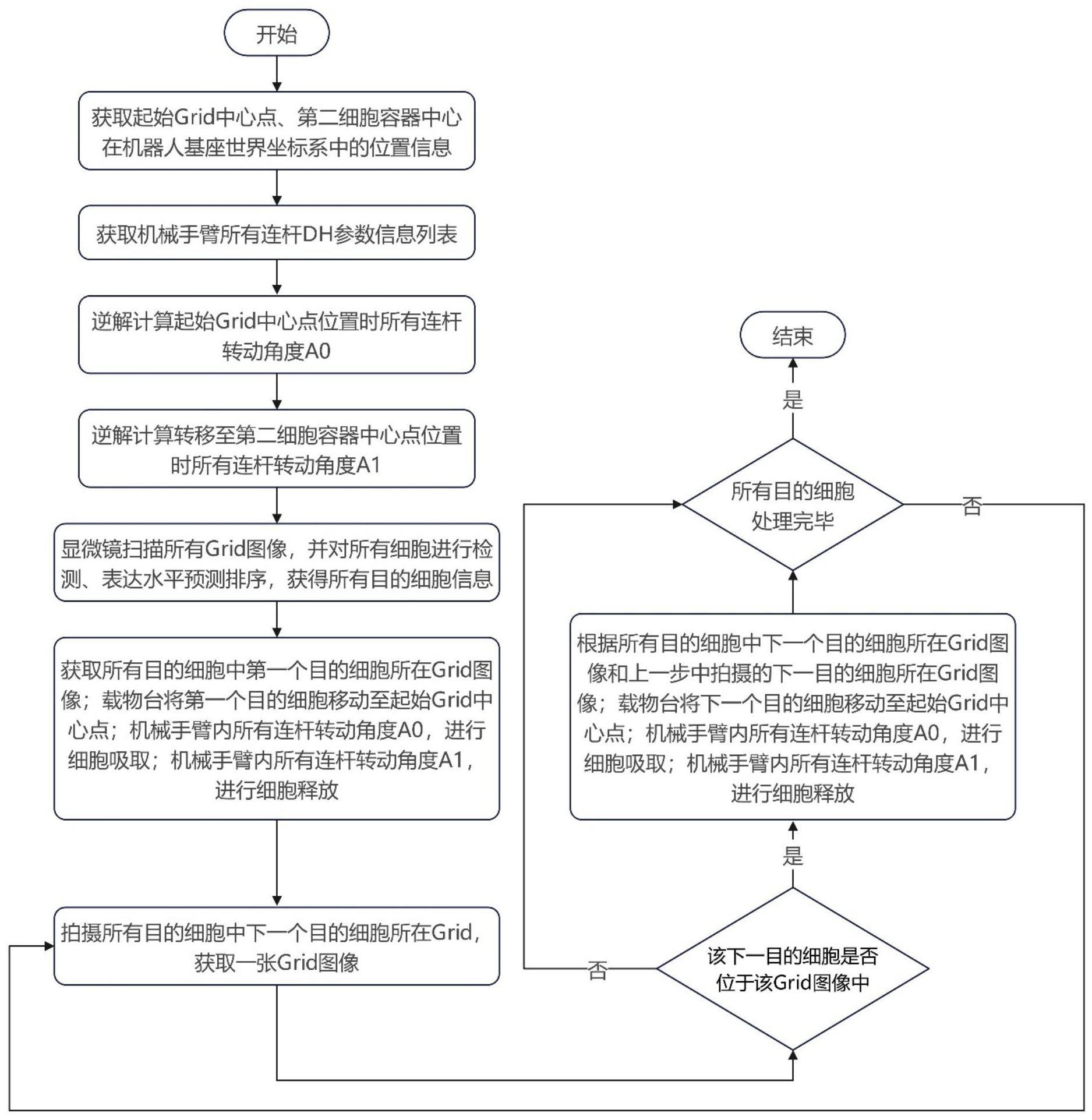
33、(1)获取显微镜的拍照起始grid中心点在机器人基座的世界坐标系中的位置信息,以及第二细胞容器的中心在机器人基座的世界坐标系中的位置信息;获取机械手臂的所有连杆的dh参数信息构成的dh参数信息列表;根据dh参数信息列表,以及起始grid中心点在机器人基座世界坐标系中的位置信息,并利用逆解计算获取机械手臂的每个连杆的转动角度a0;
34、根据dh参数信息列表,以及第二细胞容器的中心在机器人基座的世界坐标系中的位置信息,并利用逆解计算得到机械手臂的每个连杆的转动角度a1;
35、(2)控制显微镜自动扫描第一细胞容器内的目标区域,以获取所有grid图像,并利用获取的所有grid图像对第一细胞容器内的所有细胞进行检测和排序,以获得排序后的多个目的细胞;
36、(3)针对步骤(2)排序后的所有目的细胞中的第一个目的细胞而言,获取该目的细胞对应的grid图像,自动调节载物台的位置,使得该目的细胞的中心位置到达显微镜的拍照起始grid中心点的位置,控制机械手臂中的每个连杆自动转换到步骤(1)确定的转动角度a0,并控制吸取管的吸取针到达该目的细胞所在位置,执行细胞吸取操作;控制机械手臂中的每个连杆自动转换到步骤(1)确定的转动角度a1,并控制吸取管的吸取针到达第二细胞容器所在位置,执行细胞放置操作;
37、(4)根据步骤排序后的多个目的细胞,控制载物台将下一个目的细胞的中心移动至显微镜的起始grid中心点,控制显微镜对下一个目的细胞所在的grid位置重新拍照,以获取一张grid图像,并判断该下一个目的细胞是否位于该grid图像中,如果是则进入步骤(5),否则进入步骤(6);
38、(5)获取步骤(2)获取的下一个目的细胞在步骤(2)中对应的grid图像,根据该grid图像和步骤(4)获取的grid图像,确定该下一个目的细胞相对于显微镜的拍照起始grid中心点的位置,并控制自动调节载物台的位置,使得该下一个目的细胞的中心位置到达显微镜的拍照起始grid中心点的位置,控制机械手臂中的每个连杆自动转换到步骤(1)确定的转动角度a0,并控制吸取管的吸取针到达该目的细胞所在位置,执行细胞吸取操作;控制机械手臂中的每个连杆自动转换到步骤(1)确定的转动角度a1,并控制吸取管的吸取针到达第二细胞容器所在位置,执行细胞放置操作;
39、(6)针对步骤(2)排序后所有剩余的目的细胞而言,重复上述步骤(4)到(6),直到所有目的细胞都处理完毕为止。
40、优选的,步骤(2)中,所述排序为对所有细胞检测后,对所有细胞进行表达水平预测,根据所有细胞的表达水平预测结果进行排序。
41、优选地,细胞移取装置进一步包括底座,显微镜固定设置在底座的一侧,载物台活动设置在底座上,机器人固定设置在底座上相对于载物台的另一侧。
42、优选地,显微镜包括固定的光源和可移动的镜头;镜头设置于载物台的下方;光源设置于载物台的上方。
43、优选地,第一细胞容器为培养皿,用于收纳待挑选细胞;第二细胞容器为多孔板,用于收纳完成挑选的目的细胞。
44、按照本公开的另一方面,提供了一种细胞移取系统,其应用在细胞移取设备中,包括:
45、第一模块,用于获取起始grid中心点、移取装置的吸取控制信息、移取装置的释放控制信息;所述吸取信息由第一细胞容器和所述移取装置决定;所述释放控制信息由所述第二细胞容器和所述移取装置决定;
46、第二模块,用于获取所述第一细胞容器内的目标区域的所有grid图像,并利用获取的所有grid图像对第一细胞容器内的所有细胞进行检测、排序,以获得排序后的多个目的细胞;
47、第三模块,用于获取第二模块排序后的所有目的细胞中的第一个目的细胞对应的grid图像,将该目的细胞的中心位置移动至所述起始grid中心点的位置,控制所述移取装置根据所述吸取信息进行细胞吸取,控制所述移取装置根据所述释放信息进行细胞释放;
48、第四模块,用于拍摄第二模块中下一目的细胞所在grid,以获取一张grid图像,并判断该下一个目的细胞是否位于该grid图像中,如果是则进入第五模块,否则进入第六模块;
49、第五模块,用于根据第二模块获取的grid图像和第四模块获取的grid图像,将下一个目的细胞移动至起始grid中心点的位置,控制所述移取装置根据所述吸取信息进行细胞吸取,控制所述移取装置根据所述释放信息进行细胞释放;
50、第六模块,用于针对第二模块排序后所有剩余的目的细胞而言,重复上述第四模块到第六模块,直到所有目的细胞都处理完毕为止。
51、按照本公开的另一方面,提供了一种细胞移取系统,所述系统为电子设备和/或非暂态计算机可读存储介质;
52、所述电子设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上所述细胞移取方法的步骤;
53、所述非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述细胞移取方法的步骤。
54、总体而言,通过本公开所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
55、1、本公开由于采用了步骤(4),在不需要重新对所有获取所有目的细胞位置的情况下,其能够采集目的细胞实时图像,且重新确定目的细胞是否在原grid内以及目的细胞实时位置,因此能够解决现有细胞移取方法移取过程会改变其他目的细胞的位置,从而导致细胞移取操作准确率偏低的技术问题。
56、2、本公开通过设置载物台水平方向运动、显微镜与机器人水平方向不同,能够确保细胞吸取管可以到达显微镜拍照起始grid中心点位置,而且使得机器人内的机械手臂操作简单,因此能够解决现有细胞移取方法需要手动调整机器人吸取管到达具体位置,操作过程复杂的技术问题。
57、3、本公开的细胞吸取操作以及细胞放置操作是自动化的,载物台的移动是自动化的,从而能够实现细胞吸取全流程的自动化操作,不用任何人为干预,进而能够解决现有细胞移取方法不能应对不同操作用户的习惯和不同细胞的不同位置,导致实用性差的技术问题。
58、4、本公开在细胞移取工作过程中,只需要调节载物台就能实现细胞移取和放置操作,这相对于现有方法调节机械手臂更加容易;此外,只需要在获取了细胞相对于显微镜拍照起始grid中心点的位置信息,将载物台平面移动到这个位置即可实现目的细胞的吸取和放置,操作更加便捷。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!