一种基于机器视觉的智能生物采样工作站的制作方法
本发明涉及生物采样,具体为一种基于机器视觉的智能生物采样工作站。
背景技术:
1、菌落筛选在微生物学、生物工程、制药等领域中是一个常见且重要的实验步骤。进行菌落筛选的主要目的是为了从复杂的微生物混合物中,选择出具有特定特性或功能的细菌菌落,以便进行进一步研究、分析和应用。
2、当前的筛选方式大多数是采用手工筛选或者半自动操作方式,需要人工识别和采样细菌菌落。这会导致以下一些缺点:
3、(1)效率低下:手动操作可能会导致筛选和采样过程的低效率,限制了大规模细菌筛选的能力;
4、(2)人为误差:人工操作容易引入人为误差,影响结果的准确性和一致性;
5、(3)时间成本高:手动操作可能需要更多的时间,限制了实验的快速完成;
6、(4)可伸缩性差:手动或半自动化操作难以扩展到处理大量样本或高通量实验;
7、(5)操作体验不佳:手动操作可能需要训练有素的技术人员,且可能会导致操作者疲劳。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于机器视觉的智能生物采样工作站,在进行细菌筛选采样时,具备自动化识别和采样、高效筛选和采样、适于大量样本的采样、采样准确度高、采样操作体验好等优点,解决了现有细菌采样方式存在的效率低下、存在人为误差、时间成本高、可伸缩性差和操作体验不佳的问题。
3、(二)技术方案
4、为实现上述目的,本发明提供如下技术方案:
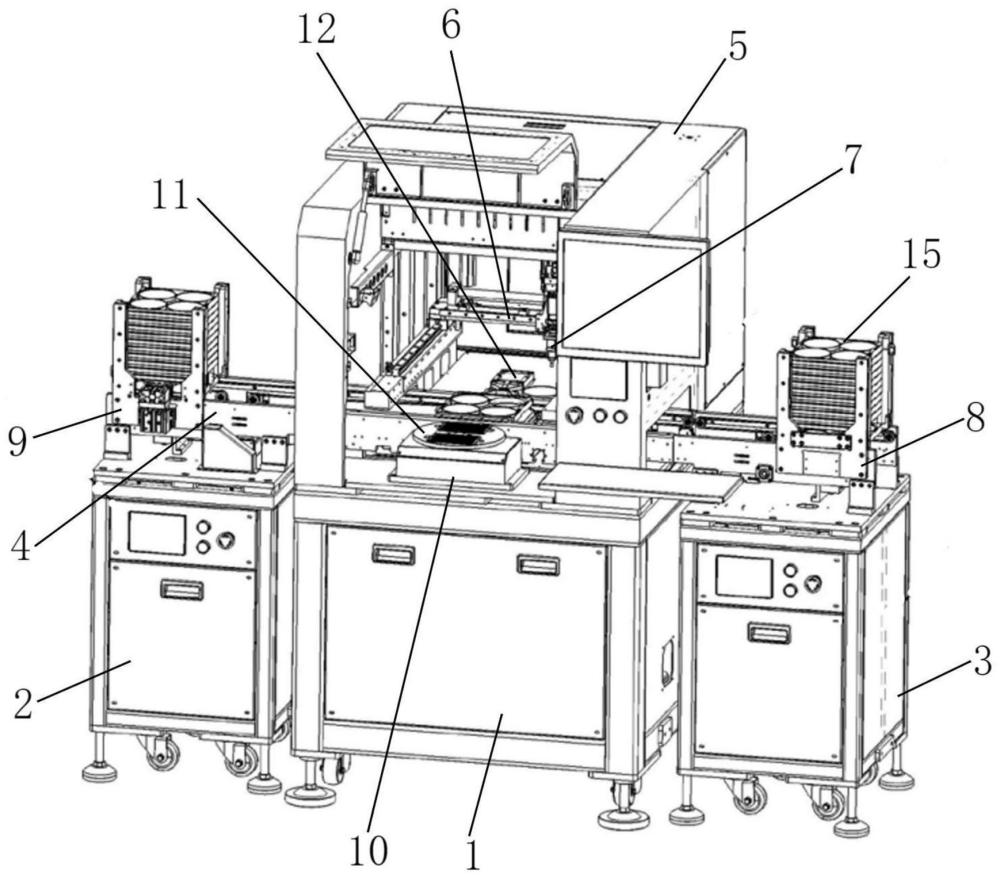
5、一种基于机器视觉的智能生物采样工作站,包括一号支撑柜、二号支撑柜、三号支撑柜和输送结构,二号支撑柜、一号支撑柜和三号支撑柜从左往右依次设置,输送结构左右横向设置于二号支撑柜、一号支撑柜和三号支撑柜上端,在输送结构的上安装有下料仓和收料仓,下料仓和收料仓分别设置于二号支撑柜的上方和三号支撑柜的上方;在一号支撑柜的上端安装有罩壳、钢珠料仓、飞拍结构和旋转驱动台,输送结构左右横向贯穿罩壳,在罩壳的内侧面上安装有三轴机械臂,三轴机械臂的输出端朝前设置,在三轴机械臂的输出端连接有采样结构,钢珠料仓、飞拍结构均位于罩壳内侧,飞拍结构设置于钢珠料仓的前方且位于输送结构的后方;旋转驱动台设置于输送结构的前方,旋转驱动台的输出端朝上设置,在旋转驱动台的输出端固定连接有旋转盘,旋转盘的上端开设有嵌槽。
6、优选的,输送结构包括前后平行设置的两个支板,支板固定于二号支撑柜、一号支撑柜和三号支撑柜上端,在前后两个支板的内侧面上均安装有同步轮同步带输送机,同步轮同步带输送机左右横向设置,同步轮同步带输送机的左右两端分别延伸至下料仓和收料仓内侧,在前后两个支板之间设置有背光板,背光板设置于一号支撑柜的上端且位于同步轮同步带输送机的下方。
7、优选的,采样结构包括固定三轴机械臂输出端的定位相机、补光灯和气动吸笔,定位相机的拍照端朝下设置,补光灯设置于定位相机的下方,气动吸笔位于补光灯的下方,气动吸笔的进气端朝下设置,在气动吸笔的进气端连接有吸嘴。
8、优选的,收料仓包括收料气缸和前后设置的两组一号仓板,前后两组一号仓板分别固定于前后两个支板的外侧端面上,在前后两组一号仓板的外侧面上均固定连接有连接板,在前后两个连接板的内侧面上均固定连接有转动座,在前后两个转动座的内侧面上均通过轴活动连接有托块,在连接转动座和托块的轴上套设有扭簧,扭簧的一端与托块的下端卡接,扭簧的另一端与转动座远离连接板的一端卡接。
9、优选的,一号仓板设置有两个,两个一号仓板左右间隔设置,转动座和托块均位于左右两个一号仓板之间,托块位于支板的上方,且延伸至四个一号仓板围成的空腔内,托块的上端在静止状态下呈水平设置;收料气缸位于前后两个支板之间,收料气缸固定于三号支撑柜的上端。
10、优选的,下料仓包括前后设置的两组二号仓板,前后两组二号仓板分别固定于前后两个支板的外侧端面上,二号仓板设置为每组两个,两个二号仓板左右间隔设置,在左右两个二号仓板之间设置有升降气缸,前后两个升降气缸分别固定于前后两个支板的外侧端面上,前后两个升降气缸的输出端均朝上设置,在前后两个升降气缸的输出端上均固定安装有放盘气缸。
11、优选的,飞拍结构包括固定于一号支撑柜上端的安装板,在安装板的上端固定连接有飞拍摄像头和光源模块,飞拍摄像头设置于光源模块的后方且与光源模块配合。
12、优选的,还包括多个钢珠,钢珠设置于钢珠料仓内或吸附于吸嘴下端开口处,光源模块可照射位于吸嘴下端开口的钢珠,飞拍摄像头可以对位于吸嘴下端开口的钢珠进行拍照成像。
13、优选的,还包括多个料盘,料盘的上端均设置有四个培养皿,四个培养皿呈矩形分布;料盘和培养皿均无色透明;在每一个培养皿的下端均设置有第一二维码,第一二维码所包含的信息包括对应培养皿的菌落信息、菌落取样要求以及第一菌落位置放置要求。
14、优选的,还包括设置于背光板上端左侧的二维码扫码器,二维码扫码器可以扫描并读取第一二维码。
15、优选的,还包括多个96孔架,96孔架嵌设于旋转盘上端的嵌槽内;旋转盘的上端至少设置有两个嵌槽。
16、优选的,在96孔架的上端边缘设置有第二二维码,第二二维码所包含的信息包括对应96孔架的第二菌落位置放置要求。
17、优选的,定位相机可以扫描并读取第二二维码。
18、与现有技术相比,本发明提供了一种基于机器视觉的智能生物采样工作站,具备以下有益效果:
19、该智能生物采样工作站,在用于细菌的菌落取样时,操作员的工作内容主要是将装有培养皿的料盘放入至下料仓内、从收料仓内取出装有培养皿的料盘、将空的96孔架嵌装于嵌槽和从嵌槽内取出96孔架,而不直接参与细菌菌落的取样,细菌的菌落取样由整个工作站自动实现,且在取样过程中,可以实现对菌落的自动化识别和采样,可以实现高效筛选和采样,提升了采样准确度,提升了采样效率,可以适于大量样本的采样,采样操作体验好。
技术特征:
1.一种基于机器视觉的智能生物采样工作站,包括一号支撑柜(1)、二号支撑柜(2)、三号支撑柜(3)和输送结构(4),其特征在于:所述二号支撑柜(2)、一号支撑柜(1)和三号支撑柜(3)从左往右依次设置,所述输送结构(4)左右横向设置于二号支撑柜(2)、一号支撑柜(1)和三号支撑柜(3)上端,在所述输送结构(4)的上安装有下料仓(9)和收料仓(8),所述下料仓(9)和收料仓(8)分别设置于二号支撑柜(2)的上方和三号支撑柜(3)的上方;在所述一号支撑柜(1)的上端安装有罩壳(5)、钢珠料仓(12)、飞拍结构(13)和旋转驱动台(10),所述输送结构(4)左右横向贯穿所述罩壳(5),在所述罩壳(5)的内侧面上安装有三轴机械臂(6),所述三轴机械臂(6)的输出端朝前设置,在所述三轴机械臂(6)的输出端连接有采样结构(7),所述钢珠料仓(12)、飞拍结构(13)均位于罩壳(5)内侧,所述飞拍结构(13)设置于钢珠料仓(12)的前方且位于输送结构(4)的后方;所述旋转驱动台(10)设置于输送结构(4)的前方,所述旋转驱动台(10)的输出端朝上设置,在所述旋转驱动台(10)的输出端固定连接有旋转盘(11),所述旋转盘(11)的上端开设有嵌槽。
2.根据权利要求1所述的一种基于机器视觉的智能生物采样工作站,其特征在于:所述输送结构(4)包括前后平行设置的两个支板(41),所述支板(41)固定于二号支撑柜(2)、一号支撑柜(1)和三号支撑柜(3)上端,在前后两个支板(41)的内侧面上均安装有同步轮同步带输送机(42),所述同步轮同步带输送机(42)左右横向设置,所述同步轮同步带输送机(42)的左右两端分别延伸至下料仓(9)和收料仓(8)内侧,在前后两个支板(41)之间设置有背光板(43),所述背光板(43)设置于一号支撑柜(1)的上端且位于同步轮同步带输送机(42)的下方。
3.根据权利要求2所述的一种基于机器视觉的智能生物采样工作站,其特征在于:所述采样结构(7)包括固定三轴机械臂(6)输出端的定位相机(71)、补光灯(72)和气动吸笔(73),所述定位相机(71)的拍照端朝下设置,所述补光灯(72)设置于定位相机(71)的下方,所述气动吸笔(73)位于补光灯(72)的下方,所述气动吸笔(73)的进气端朝下设置,在所述气动吸笔(73)的进气端连接有吸嘴(74)。
4.根据权利要求3所述的一种基于机器视觉的智能生物采样工作站,其特征在于:所述收料仓(8)包括收料气缸(82)和前后设置的两组一号仓板(81),前后两组所述一号仓板(81)分别固定于前后两个支板(41)的外侧端面上,在前后两组所述一号仓板(81)的外侧面上均固定连接有连接板(83),在前后两个所述连接板(83)的内侧面上均固定连接有转动座(84),在前后两个转动座(84)的内侧面上均通过轴活动连接有托块(85),在连接转动座(84)和托块(85)的轴上套设有扭簧,所述扭簧的一端与托块(85)的下端卡接,所述扭簧的另一端与转动座(84)远离连接板(83)的一端卡接。
5.根据权利要求4所述的一种基于机器视觉的智能生物采样工作站,其特征在于:所述一号仓板(81)设置有两个,两个所述一号仓板(81)左右间隔设置,所述转动座(84)和托块(85)均位于左右两个一号仓板(81)之间,所述托块(85)位于支板(41)的上方,且延伸至四个一号仓板(81)围成的空腔内,所述托块(85)的上端在静止状态下呈水平设置;所述收料气缸(82)位于前后两个支板(41)之间,所述收料气缸(82)固定于三号支撑柜(3)的上端。
6.根据权利要求5所述的一种基于机器视觉的智能生物采样工作站,其特征在于:所述下料仓(9)包括前后设置的两组二号仓板(91),前后两组二号仓板(91)分别固定于前后两个支板(41)的外侧端面上,所述二号仓板(91)设置为每组两个,两个所述二号仓板(91)左右间隔设置,在左右两个二号仓板(91)之间设置有升降气缸(92),前后两个升降气缸(92)分别固定于前后两个支板(41)的外侧端面上,前后两个升降气缸(92)的输出端均朝上设置,在前后两个升降气缸(92)的输出端上均固定安装有放盘气缸(93)。
7.根据权利要求6所述的一种基于机器视觉的智能生物采样工作站,其特征在于:所述飞拍结构(13)包括固定于一号支撑柜(1)上端的安装板(131),在所述安装板(131)的上端固定连接有飞拍摄像头(132)和光源模块(133),所述飞拍摄像头(132)设置于光源模块(133)的后方且与光源模块(133)配合。
8.根据权利要求7所述的一种基于机器视觉的智能生物采样工作站,其特征在于:还包括多个钢珠,所述钢珠设置于钢珠料仓(12)内或吸附于吸嘴(74)下端开口处,所述光源模块(133)可照射位于吸嘴(74)下端开口的钢珠,所述飞拍摄像头(132)可以对位于吸嘴(74)下端开口的钢珠进行拍照成像。
9.根据权利要求8所述的一种基于机器视觉的智能生物采样工作站,其特征在于:还包括多个料盘(15),所述料盘(15)的上端均设置有四个培养皿,四个所述培养皿呈矩形分布;所述料盘(15)和培养皿均无色透明;在每一个培养皿的下端均设置有第一二维码,所述第一二维码所包含的信息包括对应培养皿的菌落信息、菌落取样要求以及第一菌落位置放置要求。
10.根据权利要求9所述的一种基于机器视觉的智能生物采样工作站,其特征在于:还包括设置于背光板(43)上端左侧的二维码扫码器(14),所述二维码扫码器(14)可以扫描并读取第一二维码。
11.根据权利要求10所述的一种基于机器视觉的智能生物采样工作站,其特征在于:还包括多个96孔架,所述96孔架嵌设于旋转盘(11)上端的嵌槽内;所述旋转盘(11)的上端至少设置有两个嵌槽。
12.根据权利要求11所述的一种基于机器视觉的智能生物采样工作站,其特征在于:在所述96孔架的上端边缘设置有第二二维码,所述第二二维码所包含的信息包括对应96孔架的第二菌落位置放置要求。
13.根据权利要求12所述的一种基于机器视觉的智能生物采样工作站,其特征在于:所述定位相机(71)可以扫描并读取第二二维码。
技术总结
本发明涉及生物采样技术领域,且公开了一种基于机器视觉的智能生物采样工作站。该生物采样工作站,包括一号支撑柜和输送结构,在输送结构的上安装有下料仓和收料仓,在一号支撑柜的上端安装有罩壳、钢珠料仓、飞拍结构和旋转驱动台,输送结构左右横向贯穿罩壳,在罩壳的内侧面上安装有三轴机械臂,在三轴机械臂的输出端连接有采样结构,飞拍结构设置于钢珠料仓的前方且位于输送结构的后方;旋转驱动台设置于输送结构的前方,旋转驱动台的输出端固定连接有旋转盘,旋转盘的上端开设有嵌槽;在取样过程中,可以实现对菌落的自动化识别和采样,可以实现高效筛选和采样,提升了采样准确度,提升了采样效率,可以适于大量样本的采样,采样操作体验好。
技术研发人员:王晓兵,张彦欣,张彦雷
受保护的技术使用者:青岛工发智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!