超声定位挑菌涂布系统及方法与流程
本发明涉及自动化实验室,尤其涉及一种超声定位挑菌涂布系统及方法。
背景技术:
1、在生物实验中,对菌类微生物培养后,要对培养皿中的菌株进行读取并进行挑菌操作。在菌类微生物进行培养前,要对培养皿进行涂布操作。
2、在自动化实验室推进过程中,对培养皿或多孔板进行挑菌和涂布过程中,由于培养皿中的培养基表面会产生高低不同,而此高低不同的尺寸直接影响了菌类的挑选与涂布操作。因为菌类的尺寸相对小,在低的表面会影响接种,在高的表面会刺破培养基。
3、在涂布的时候,高低不平的表面如果是统一尺寸的涂布方式,也会使培养基的表面产生破坏。
技术实现思路
1、本发明的目的是为了解决上述问题,提供一种超声定位挑菌涂布系统及方法,通过超声定位方式,测量培养基上每个挑菌涂布位置的高度,分别对不同高度的培养基进行挑菌涂布操作。
2、本发明采取的技术方案是:
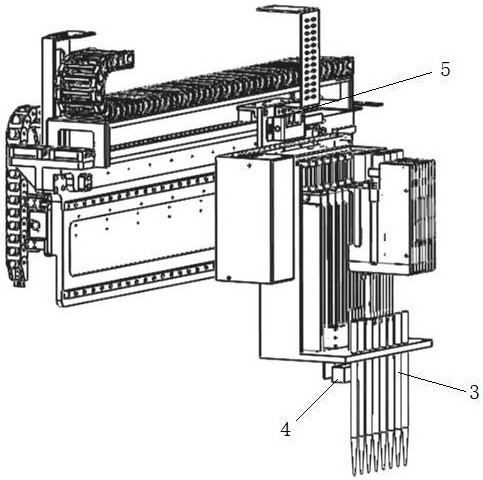
3、一种超声定位挑菌涂布系统,其特征是,包括设置于工作台上的培养容器、设置于工作台上方的机械臂、控制单元,所述机械臂上安装有操作枪,所述操作枪具有xyz三轴自由度,所述机械臂上还安装有超声定位装置,所述培养容器上设置位置阵列,控制单元控制超声定位装置对培养容器上的位置阵列中的各位置进行高度超声检测,所述控制单元根据位置阵列的各位置高度,驱动操作枪对培养容器中的位置阵列的各位置进行挑菌涂布操作。
4、进一步,所述超声定位装置设置在操作枪的一侧,所述超声定位装置通过对位置阵列中的一个位置进行多点测量法,实现高度测量。
5、进一步,所述操作枪包括排枪和枪头,所述排枪的数量与位置阵列中的位置数量相匹配,所述工作台上设置的枪头盘,所述枪头盘内布置挑菌枪头和涂布枪头。
6、进一步,所述培养容器为圆形培养皿,所述位置阵列为在圆形培养皿的多个同心圆上的点。
7、进一步,所述培养容器为多孔板,所述位置阵列为在多孔板的孔位中的多个位置上的点。
8、一种超声定位挑菌方法,其特征是,包括如下步骤:
9、第一步:控制单元驱动机械臂上的超声定位装置对生长有菌种的培养容器上的位置阵列中的各位置进行高度超声检测,并记录;
10、第二步:控制单元驱动机械臂上的超声定位装置对待植菌的培养容器上的位置阵列中的各位置进行高度超声检测,并记录;
11、第三步:驱动机械臂上的操作枪卡装挑菌枪头;
12、第四步:驱动挑菌枪头伸入生长有菌种的培养容器上对应的高度值,进行挑菌;
13、第五步:移动挑菌枪头伸入待植菌的培养容器上对应的高度值,进行植菌。
14、进一步,所述第一步、第三步中,超声检测的过程是,通过对检测点周边的多个位置点进行多次检测,取最低值作为该点的高度值。
15、一种超声定位涂布方法,其特征是,包括如下步骤:
16、第一步:控制单元驱动机械臂上的超声定位装置对待涂布的培养容器上的位置阵列中的各位置进行高度超声检测,并记录;
17、第二步:驱动机械臂上的操作枪卡装涂布枪头;
18、第三步:驱动涂布枪头伸入待涂布的培养容器上对应的高度值;
19、第四步:驱动涂布枪头在待涂布的培养容器上做回字型旋转涂布操作。
20、进一步,所述第一步中,超声检测的过程是,通过对检测点周边的多个位置点进行检测,取平均值作为该点的高度值,涂布时取最接近高度值的点作为涂布点。
21、本发明的有益效果是:
22、(1)通过超声定位,精确测量培养基表面的高度;
23、(2)一次对培养基表面的多个操作点进行测高,分别将高度分配至每个操作枪,提高操作效率;
24、(3)对操作点进行多点测量的方式,提高测量精度。
技术特征:
1.一种超声定位挑菌涂布系统,其特征在于:包括设置于工作台上的培养容器、设置于工作台上方的机械臂、控制单元,所述机械臂上安装有操作枪,所述操作枪具有xyz三轴自由度,所述机械臂上还安装有超声定位装置,所述培养容器上设置位置阵列,控制单元控制超声定位装置对培养容器上的位置阵列中的各位置进行高度超声检测,所述控制单元根据位置阵列的各位置高度,驱动操作枪对培养容器中的位置阵列的各位置进行挑菌涂布操作。
2.根据权利要求1所述的超声定位挑菌涂布系统,其特征在于:所述超声定位装置设置在操作枪的一侧,所述超声定位装置通过对位置阵列中的一个位置进行多点测量法,实现高度测量。
3.根据权利要求1所述的超声定位挑菌涂布系统,其特征在于:所述操作枪包括排枪和枪头,所述排枪的数量与位置阵列中的位置数量相匹配,所述工作台上设置的枪头盘,所述枪头盘内布置挑菌枪头和涂布枪头。
4.根据权利要求1至3中任一项所述的超声定位挑菌涂布系统,其特征在于:所述培养容器为圆形培养皿,所述位置阵列为在圆形培养皿的多个同心圆上的点。
5.根据权利要求1至3中任一项所述的超声定位挑菌涂布系统,其特征在于:所述培养容器为多孔板,所述位置阵列为在多孔板的孔位中的多个位置上的点。
6.一种超声定位挑菌方法,应用如权利要求1至5中任一项所述的超声定位挑菌涂布系统,其特征在于:包括如下步骤:
7.根据权利要求6所述的超声定位挑菌方法,其特征在于:所述第一步、第三步中,超声检测的过程是,通过对检测点周边的多个位置点进行多次检测,取最低值作为该点的高度值。
8.一种超声定位涂布方法,应用如权利要求1至5中任一项所述的超声定位挑菌涂布系统,其特征在于:包括如下步骤:
9.根据权利要求8所述的超声定位涂布方法,其特征在于:所述第一步中,超声检测的过程是,通过对检测点周边的多个位置点进行检测,取平均值作为该点的高度值,涂布时取最接近高度值的点作为涂布点。
技术总结
本发明涉及自动化实验室技术领域,公开了一种超声定位挑菌涂布系统,包括设置于工作台上的培养容器、设置于工作台上方的机械臂、控制单元,所述机械臂上安装有操作枪,所述操作枪具有XYZ三轴自由度,所述机械臂上还安装有超声定位装置,所述培养容器上设置位置阵列,控制单元控制超声定位装置对培养容器上的位置阵列中的各位置进行高度超声检测,所述控制单元根据位置阵列的各位置高度,驱动操作枪对培养容器中的位置阵列的各位置进行挑菌涂布操作。本发明还公开了挑菌和涂布的方法。本发明通过超声定位方式,测量培养基上每个挑菌涂布位置的高度,分别对不同高度的培养基进行挑菌涂布操作。
技术研发人员:刘家朋
受保护的技术使用者:上海汇像信息技术有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!