用于柔性传感器的3D打印耐磨封装层及制备方法和应用
本发明涉及3d打印柔性传感器,具体涉及一种用于柔性传感器的3d打印耐磨封装层及制备方法和应用。
背景技术:
1、柔性电子技术在信息科学、材料科学、无线通讯技术及计算机科学等学科的推动下,向着可延展、集成化、多功能化以及智能化方向快速发展。柔性传感器的发展已经到达了一定的程度,各式各样的新型器件层出不穷,应用场景也各不相同。然而从材料的选择上,对柔性传感器表面设计,以及制备工艺上仍存在一些不足之处。在关注传感器宽应变范围及大的灵敏度外,传感器在实际使用环境中所遇到的挑战也需要进一步克服。例如在日常穿戴过程中由于摩擦所带来的磨损问题亟待解决。
技术实现思路
1、为了克服现有技术中的问题,本发明的目的在于提供一种用于柔性传感器的3d打印耐磨封装层及制备方法和应用,该方法制备的柔性封装层可以降低摩擦系数及磨损率,可以有效对传感器的传感层形成保护作用,同时延长传感器的使用寿命。
2、为了达到上述目的,本发明采取的技术方案为:
3、一种可用于柔性传感器的3d打印耐磨封装层制备方法,包括以下步骤:
4、将fe3o4@sio2二维纳米链条在酒精中超声分散,然后加入到sylgard184-a中,搅拌均匀后,干燥,得到母液;
5、将sylgard184-a、sylgard184-b、甲基乙酰氧基丙基甲基硅氧烷和二甲基硅氧烷的共聚物和光引发剂,搅拌均匀后经紫外光照,得到基液;
6、将母液和基液混合形成墨水;
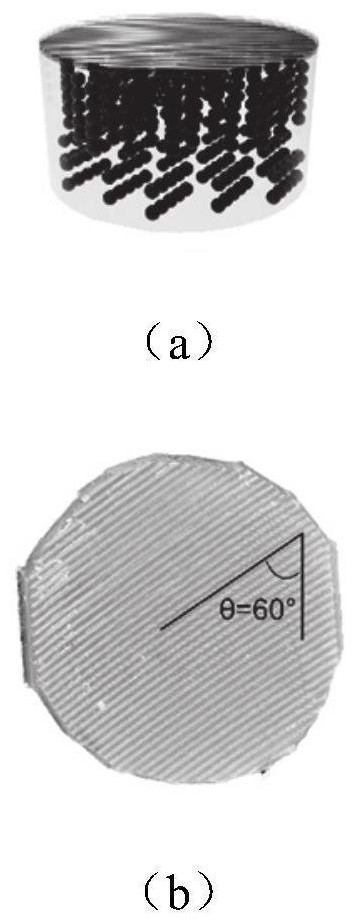
7、将墨水采用3d打印,得到耐磨封装层;耐磨封装层包括至少两层,最外层采用旋转磁场进行定向。
8、进一步的,光引发剂为2,4,6-三甲基苯甲酰基苯基膦酸乙酯。
9、进一步的,母液和基液的质量比为1.25-2.25g:0.01-0.2g。
10、进一步的,制备母液时,fe3o4@sio2二维纳米链条与sylgard184-a的质量比为2-3mg:2-3g。
11、进一步的,制备基液时,sylgard184-a、sylgard184-b、甲基乙酰氧基丙基甲基硅氧烷和二甲基硅氧烷的共聚物和光引发剂的质量比为2-3g:0.2-0.3g:0.5-0.7g:0.03-0.05g。
12、进一步的,紫外光照的条件为:采用365nm紫外光照5s。
13、进一步的,最外层采用旋转磁场进行定向,包括以下步骤:旋转磁场1-5min,使磁场方向固定并持续2-10min,紫外照射2-10s后固化。
14、进一步的,固化的条件为:温度为120-160℃,时间为5-8h。
15、根据所述方法制备的可用于柔性传感器的3d打印耐磨封装层,包括至少两层,最外层为垂直层,其他所有层为水平层。
16、根据所述方法制备的可用于柔性传感器的3d打印耐磨封装层在柔性电子设备和可穿戴柔性传感器中的应用。
17、与现有技术相比,本发明具有的有益效果:
18、本发明使用聚二甲基硅氧烷(pdms)作为主基质材料,甲基乙酰氧基丙基甲基硅氧烷和二甲基硅氧烷的共聚(m-pdms)、光引发剂作为流变改善剂,使其具备可打印性质。fe3o4@sio2二维纳米链条作为力学性能增强相,控制纳米链条的排列,使得基质材料的摩擦学性能及其他机械性能得到提高。所使用的材料均无毒害,生物相容性好,不会与皮肤产生免疫排斥反应,可以用于可穿戴设备封装层使用。打印的多层带角度封装层,摩擦学试验结果显示:由于角度表面的织构存在有效地降低了摩擦系数,同时纳米链条在不同层之间的排列形成了类似鲍鱼壳外层的结构,实现了低磨损率(相对于pdms,降低了95.36%)。本发明制备流程简单,成本低廉,制备过程安全,原料皆无毒无害生物相容性好。本发明制备的柔性封装层力学性能强,摩擦学性能优异,可以更好地实现对柔性传感器封装层的保护。
19、进一步的,fe3o4@sio2二维纳米链条与sylgard184-a的质量比为2-3mg:2-3g,磁场可以有效地驱动,使得链条可以在主基质中实现按需排列。
20、进一步的,因聚二甲基硅氧烷(pdms)本身不具备剪切变稀的特性,因此需要加入流变改善剂甲基乙酰氧基丙基甲基硅氧烷和二甲基硅氧烷的共聚(m-pdms),且制备基液时,sylgard184-a、sylgard184-b、甲基乙酰氧基丙基甲基硅氧烷和二甲基硅氧烷的共聚物和光引发剂的质量比为2-3g:0.2-0.3g:0.5-0.7g:0.03-0.05g。
21、进一步的,在打印过程中需要利用365nm波长光源对打印样品进行初步固化,使其具备良好的三维形状。
22、本发明制备的耐磨封装层可以与其他柔性导电层集成打印,简单高效。将封装层与传感层集成后制备为可穿戴设备,可以有效地提高柔性传感器的使用寿命。相对于目前在柔性电子设备领域常用的聚二甲基硅氧烷(pdms)封装层,本发明的封装层摩擦系数降低了27.70%,磨损率降低了95.36%。因此,该制备方法所得的柔性层在实际生活中具有良好的运用场景,如健身活动时的摩擦与剐蹭,都可以通过本方法的柔性层来更好地保护运动中的柔性电子设备的传感层,同时也可以实现大范围低成本制备,进一步将其推广。
技术特征:
1.一种可用于柔性传感器的3d打印耐磨封装层制备方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的可用于柔性传感器的3d打印耐磨封装层制备方法,其特征在于,光引发剂为2,4,6-三甲基苯甲酰基苯基膦酸乙酯。
3.根据权利要求1所述的可用于柔性传感器的3d打印耐磨封装层制备方法,其特征在于,母液和基液的质量比为1.25-2.25g:0.01-0.2g。
4.根据权利要求1所述的可用于柔性传感器的3d打印耐磨封装层制备方法,其特征在于,制备母液时,fe3o4@sio2二维纳米链条与sylgard184-a的质量比为2-3mg:2-3g。
5.根据权利要求1所述的可用于柔性传感器的3d打印耐磨封装层制备方法,其特征在于,制备基液时,sylgard184-a、sylgard184-b、甲基乙酰氧基丙基甲基硅氧烷和二甲基硅氧烷的共聚物和光引发剂的质量比为2-3g:0.2-0.3g:0.5-0.7g:0.03-0.05g。
6.根据权利要求1所述的可用于柔性传感器的3d打印耐磨封装层制备方法,其特征在于,紫外光照的条件为:采用365nm紫外光照5s。
7.根据权利要求1所述的可用于柔性传感器的3d打印耐磨封装层制备方法,其特征在于,最外层采用旋转磁场进行定向,包括以下步骤:旋转磁场1-5min,使磁场方向固定并持续2-10min,紫外照射2-10s后固化。
8.根据权利要求1所述的可用于柔性传感器的3d打印耐磨封装层制备方法,其特征在于,固化的条件为:温度为120-160℃,时间为5-8h。
9.根据权利要求1-8任一项所述方法制备的可用于柔性传感器的3d打印耐磨封装层,其特征在于,包括至少两层,最外层为垂直层,其他所有层为水平层。
10.根据权利要求1-8任一项所述方法制备的可用于柔性传感器的3d打印耐磨封装层在柔性电子设备和可穿戴柔性传感器中的应用。
技术总结
本发明公开一种用于柔性传感器的3D打印耐磨封装层及制备方法和应用,制备包括以下步骤:将Fe3O4@SiO2二维纳米链条在酒精中超声分散,然后加入到Sylgard184‑A中,得到母液;将Sylgard184‑A、Sylgard184‑B、甲基乙酰氧基丙基甲基硅氧烷和二甲基硅氧烷的共聚物和光引发剂,经紫外光照,得到基液;将母液和基液混合形成墨水;将墨水采用3D打印,得到耐磨封装层;耐磨封装层包括至少两层,最外层采用旋转磁场进行定向。该封装层具有极低的摩擦系数和磨损率,可用于在柔性电子设备中和可穿戴柔性传感器中。
技术研发人员:秦立果,马泽宇,卢山,吴宇浩,黄小东
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!