一种基于深度相机的抗干扰方法和装置与流程
本发明涉及移动机器人,尤其涉及一种基于深度相机的抗干扰方法和装置。
背景技术:
1、在移动机器人领域中,机器需要实现避障、对接、导航等功能。且随着工业4.0的推广,无人工厂已然成为主流。选用感知传感器去实现这些功能变成必然,目前市场主流方案中,结构光与tof的感知方案占主导地位。其中,结构光的测距局限于baseline,3米的测距范围已是极限,且精准度随着距离的增加衰减明显。若提高精准度则需增大baseline,这会使结构光的相机体积变得很大,在车体安装方向会有很大限制。而tof的感知方案测距范围10米以内不成问题,精准度的衰减不会像结构光那么明显。同时具有较好的时效性、高频率、三维成像的优势。在无人工厂中必然出现百台以上的车运作,tof相机多以940纳米作为工作波长,多台在一起工作,相机会出现多机干扰(multi-machine interface)影响避障、对接、导航的功能效果,会使得机器人对指令的误判,造成安全隐患。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本发明提供一种基于深度相机的抗干扰方法和装置,其解决了两台及以上的机器人一起工作时,相机之间存在干扰,使得机器人对指令产生误判,造成安全隐患的技术问题。
3、(二)技术方案
4、为了达到上述目的,本发明采用的主要技术方案包括:
5、第一方面,本发明实施例提供一种基于深度相机的抗干扰方法,包括:
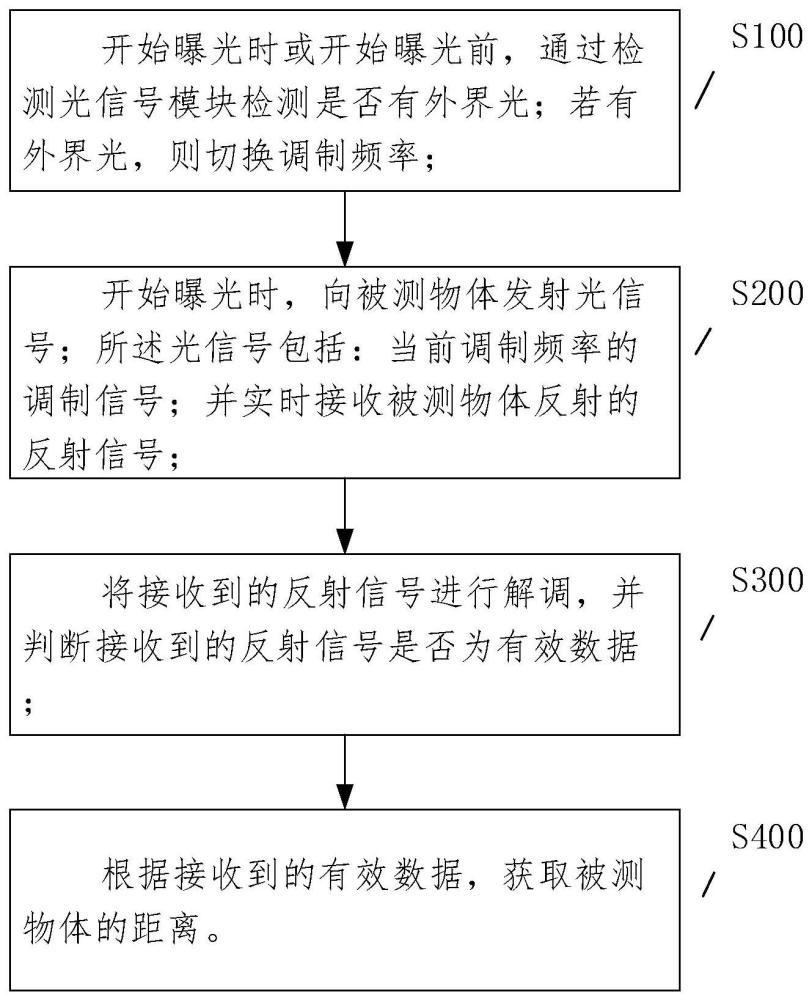
6、s100、开始曝光时或开始曝光前,实时检测是否有外界光;
7、若有外界光,则切换发射的光信号的调制频率;
8、s200、开始曝光时,向被测物体发射光信号;所述光信号包括:当前调制频率的调制信号;并实时接收被测物体反射的反射信号;
9、s300、将接收到的反射信号进行解调,生成解调信号,并判断接收到的反射信号是否为有效数据;
10、s400、当接收到的反射信号是有效数据时,根据接收到的有效数据,获取被测物体的距离。
11、可选地,所述反射信号与解调信号具有相同的调制频率;
12、所述解调信号r(t)通过公式一得到,所述公式一为:
13、
14、ω=2πf;
15、其中,a为调制幅度,ω为角速度,为信号相位,f为调制频率;t为接收到反射信号与发射调制信号的间隔时间;
16、所述调制信号c(t)通过公式二得到,所述公式二为:
17、c(t)=cos(ωt);
18、其中,ω为角速度,t为接收到反射信号与发射调制信号的间隔时间。
19、可选地,所述s300包括:
20、s300-1、将接收到的反射信号进行解调,生成解调信号;
21、s300-2、将所述解调信号与调制信号进行互相关处理,生成结果信号;
22、s300-3、根据所述结果信号判断其是否为有效数据。
23、可选地,所述结果信号通过公式三得到,所述公式三为:
24、
25、其中,τ为调制信号与解调信号互相关的延时相位,t为信号周期,a为调制幅度,ω为角速度,为信号相位,t为接收到反射信号与发射调制信号的间隔时间;
26、当调制信号与解调信号的调制频率不同时,s(t)为0,则该调制信号为干涉信号,进行舍弃。
27、可选地,在深度相机开始曝光前包括:所述相机曝光时刻前tus时间的时刻。
28、可选地,所述深度处理模块切换调制频率包括:
29、切换后的调制频率与切换前的调制频率之差小于5mhz。
30、可选地,所述深度相机使用4快门原理进行深度测量,此时,快门角度分别为0°、90°、180°、270°,分别得到深度相机四次曝光的强度值。
31、第二方面,本发明实施例提供一种基于深度相机的抗干扰装置,包括:
32、检测单元,用于在深度相机开始曝光时或在开始曝光前,检测是否有外界光;若有外界光,则发送检测信号至所述干扰处理模块;
33、干扰处理单元,用于接收所述检测信号,并判断是否切换调制频率,并发送信号至所述深度处理单元;若要切换调制频率,切换前的调制频率与切换后的调制频率之差小于5mhz;
34、发射单元,用于向被测物体发射激光光源;所述激光光源包括当前调制频率的调制信号;
35、接收单元,用于接收被测物体上激光光斑的反射信号;
36、深度处理单元,用于根据接收到的干扰处理单元发送的信号判断是否切换调制信号的调制频率;当所述接收单元接收到被测物体上的反射信号后,获取并解调反射信号,筛选有效数据,并根据有效数据输出图像。
37、可选地,所述检测单元包括pd器件或apd器件或sipm器件;
38、所述接收单元包括ccd或cmos芯片;
39、所述干扰处理单元包括可编程芯片;所述可编程芯片包括:cpld或fpga。
40、可选地,所述调制信号包括多个脉冲间隔相同、调制幅度变化的光脉冲;光脉冲的波长包括红外光。
41、(三)有益效果
42、本发明的有益效果是:本发明的一种基于深度相机的抗干扰方法和装置,通过判断是否存在外界光,判断是否切换调制频率的方式躲避干扰,可以有效抑制干扰光信号对反射光信号的干扰,提升深度相机检测结果的准确率,有效扩展移动机器人对台协作的技术领域。
技术特征:
1.一种基于深度相机的抗干扰方法,其特征在于,包括:
2.根据权利要求1所述的基于深度相机的抗干扰方法,其特征在于,
3.根据权利要求2所述的基于深度相机的抗干扰方法,其特征在于,所述s300包括:
4.根据权利要求3所述的基于深度相机的抗干扰方法,其特征在于,
5.根据权利要求1所述的基于深度相机的抗干扰方法,其特征在于,在深度相机开始曝光前包括:所述相机曝光时刻前tus时间的时刻。
6.根据权利要求1所述的基于深度相机的抗干扰方法,其特征在于,所述深度处理模块切换调制频率包括:
7.根据权利要求1所述的基于深度相机的抗干扰方法,其特征在于,所述深度相机使用4快门原理进行深度测量,此时,快门角度分别为0°、90°、180°、270°,分别得到深度相机四次曝光的强度值。
8.一种基于深度相机的抗干扰装置,其特征在于,包括:
9.根据权利要求8所述的基于深度相机的抗干扰装置,其特征在于,
10.根据权利要求8所述的基于分频的抗干扰装置,其特征在于,所述调制信号包括多个脉冲间隔相同、调制幅度变化的光脉冲;光脉冲的波长包括红外光。
技术总结
本发明涉及移动机器人技术领域,尤其涉及一种基于深度相机的抗干扰方法和装置,其中,S100、开始曝光时或开始曝光前,检测是否有外界光;若有外界光,则切换调制频率;所述外界光包括:其它深度相机光信号;S200、开始曝光时,向被测物体发射光信号;所述光信号包括:当前调制频率的调制信号;并实时接收被测物体反射的反射信号;S300、将接收到的反射信号进行解调,并判断接收到的反射信号是否为有效数据。S400、当接收到的反射信号是有效数据时,根据接收到的有效数据,获取被测物体的距离。其有益效果是,有效抑制干扰光信号对反射光信号的干扰,提升深度相机检测结果的准确率。
技术研发人员:马佩服,国学理,王继锴,徐永奎
受保护的技术使用者:杭州蓝芯科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!