一种适用于水陆两栖的无人探测车的制作方法
本发明涉及无人探测车,更具体地说,本发明涉及一种适用于水陆两栖的无人探测车。
背景技术:
1、无人探测车是一种不载人,通过远程操控的探测车,无人探测车自主技术即通过在探测车上构建一个智能自主管理软件系统,自主地进行工程任务与科学任务的规划调度、命令执行、状态的监测与故障时的系统重构,完成无人参与情况下的探测器长时间自主安全运行,自主技术已经逐渐成为未来发展的一项关键技术,主要以科研为目的,目前常见的有水下无人探测器,深空无人探测器等。
2、现有的水陆两栖的无人探测车在在极端天气工作时,由于其探测摄像头设置在外部,极易受到雨水的影响,从而会使得拍摄的画面受到影响,进而影响探测精度,另外现有的水陆两栖的无人探测车在水面进行探测工作时,稳定性较差,容易发生晃动或者时倾倒的问题,影响探测效果。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种适用于水陆两栖的无人探测车,本发明所要解决的问题是:现有的水陆两栖的无人探测车在在极端天气工作时,由于其探测摄像头设置在外部,极易受到雨水的影响,从而会使得拍摄的画面受到影响,进而影响探测精度,另外现有的水陆两栖的无人探测车在水面进行探测工作时,稳定性较差,容易发生晃动或者时倾倒的问题,影响探测效果。
2、为实现上述目的,本发明提供如下技术方案:一种适用于水陆两栖的无人探测车,包括无人探测车体,所述无人探测车体上方设置有转动平台,且转动平台通过转动主轴与无人探测车体相连,所述转动平台上方固定连接有探测箱,所述探测箱外壁一侧设置有玻璃窗,所述玻璃窗内侧安装有高清摄像头,所述玻璃窗外壁一侧设置有清理机构,所述清理机构包括第一清理刷、第二清理刷、转动板和固定板,所述固定板位于转动平台内部上方,所述第一清理刷和第二清理刷底端与固定板之间均通过铰链连接,所述第一清理刷一侧固定连接有第一连接杆,所述第二清理刷一侧固定连接有第二连接杆,所述第一连接杆和第二连接杆之间通过第三连接杆相连,所述第一连接杆远离第三连接杆的一端铰链连接有第四连接杆,所述第四连接杆远离第一连接杆的一端铰链连接有第五连接杆,所述第一连接杆一侧中部铰链连接有第六连接杆,且第六连接杆与第五连接杆一端铰链连接,所述第五连接杆远离第六连接杆的一端与转动板之间通过铰链连接,所述转动板一端通过转轴连接有驱动电机;
3、所述无人探测车体外壁两端设置有稳定机构,所述稳定机构包括固定块、第一稳定架、第二稳定架和第三稳定架,所述第一稳定架和第二稳定架与固定块之间均通过铰链连接,所述第一稳定架和第二稳定架远离固定块的一端与第三稳定架之间均通过铰链连接,所述第二稳定架一侧设置有液压杆,且液压杆与无人探测车体外壁之间通过铰链连接,所述液压杆远离无人探测车体的一端与第三稳定架铰链连接,所述第三稳定架下方铰链连接有浮标。
4、优选的,所述探测箱内部设置有控制系统箱和蓄电池箱,所述控制系统箱内部设置有处理器、无线传输模块和gps定位模块。
5、优选的,所述无人探测车体外壁四周安装有避让传感器和激光测距传感器,所述避让传感器和激光测距传感器与控制系统箱电性连接。
6、优选的,所述无人探测车体外壁上方安装有太阳能板,且太阳能板与蓄电池箱之间电性连接。
7、优选的,所述无人探测车体下方两侧安装有移动万向轮,所述无人探测车体外壁下方安装有喷水推进器。
8、优选的,所述转动主轴底端安装有旋转电机,且旋转电机位于无人探测车体内部上方。
9、本发明的技术效果和优点:
10、1、本发明通过设置清理机构,通过利用驱动电机工作可以带动转动板转动,转动板转动可以带动第五连接杆进行摆动,第五连接杆摆动可以带动第四连接杆和第六连接杆进行摆动,由于第一连接杆和第一清理刷与固定板之间均通过铰链连接,从而可以通过拉动第一连接杆带动第一清理刷进行左右往复摆动,第一连接杆和第二连接杆之间通过第三连接杆相连,从而可以通过第一连接杆和第三连接杆带动第二连接杆摆动,第二清理刷和第二连接杆之间通过转轴固定连接,从而可以打动第二清理刷同步左右往复摆动,通过利用第一清理刷和第二清理刷同时在玻璃窗外壁摆动,从而可以将玻璃窗外壁上的雨水、灰层以及雪花及时清理掉,保证高清摄像头的探测精度,从而可以使得无人探测车在极端天气以及特殊地理环境情况下保证正常探测作业,提升无人探测车的使用寿命。
11、2、本发明通过设置稳定机构,通过驱动液压杆伸长,驱动液压杆伸长可以带动第一稳定架和第二稳定架向下倾斜,通过利用第一稳定架和第二稳定架向下倾斜可以带动另一端的第三稳定架向下移动,通过利用第三稳定架向下移动,可以带动第三稳定架底端的浮标与水面接触,从而可以增大无人探测车体与水面的接触面积,提升无人探测车体在探测时的稳定性,不易发生倾倒的问题,增强用于水陆两栖的无人探测车的抗风性能。
技术特征:
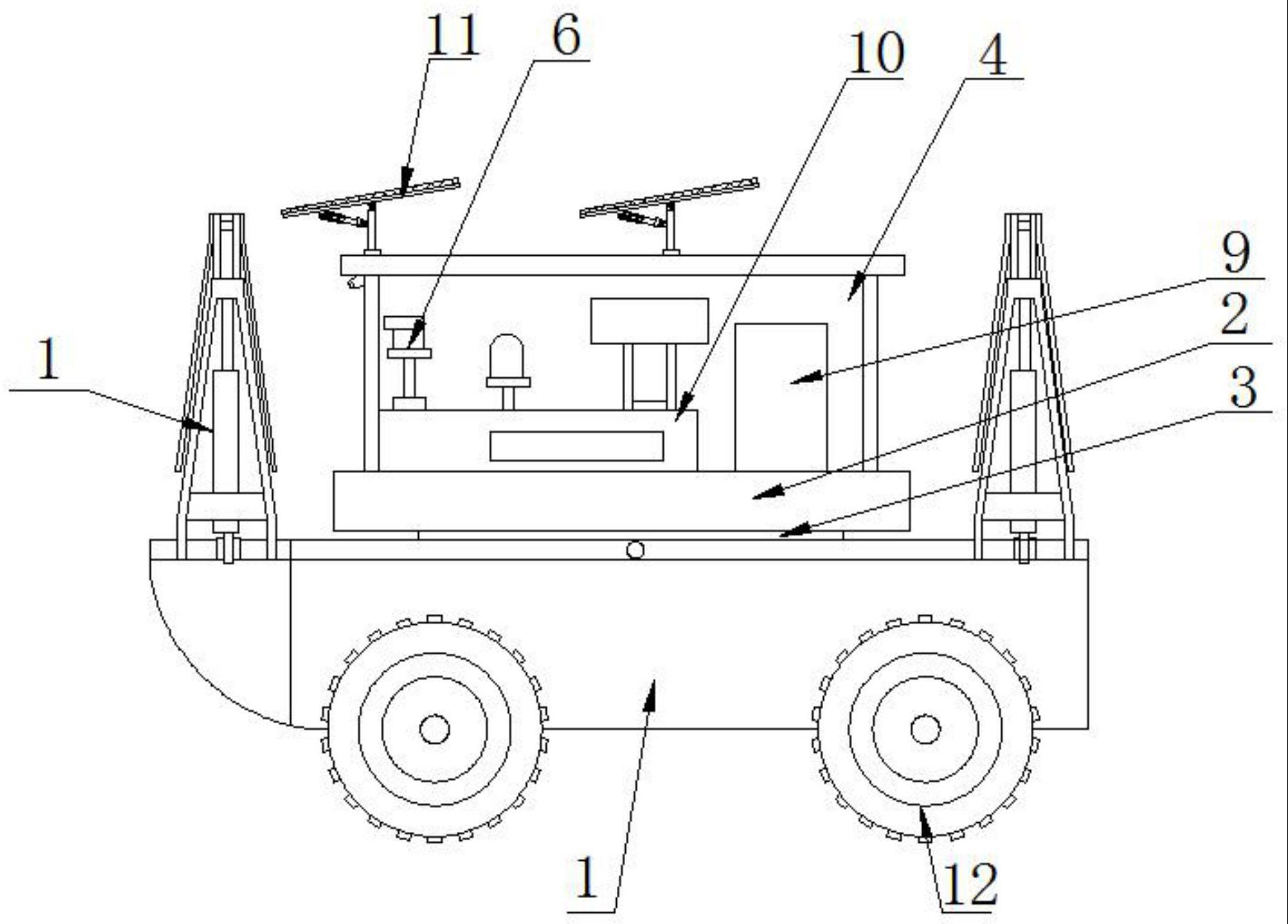
1.一种适用于水陆两栖的无人探测车,包括无人探测车体(1),其特征在于:所述无人探测车体(1)上方设置有转动平台(2),且转动平台(2)通过转动主轴(3)与无人探测车体(1)相连,所述转动平台(2)上方固定连接有探测箱(4),所述探测箱(4)外壁一侧设置有玻璃窗(5),所述玻璃窗(5)内侧安装有高清摄像头(6),所述玻璃窗(5)外壁一侧设置有清理机构(7),所述清理机构(7)包括第一清理刷(701)、第二清理刷(702)、转动板(703)和固定板(704),所述固定板(704)位于转动平台(2)内部上方,所述第一清理刷(701)和第二清理刷(702)底端与固定板(704)之间均通过铰链连接,所述第一清理刷(701)一侧固定连接有第一连接杆(705),所述第二清理刷(702)一侧固定连接有第二连接杆(706),所述第一连接杆(705)和第二连接杆(706)之间通过第三连接杆(707)相连,所述第一连接杆(705)远离第三连接杆(707)的一端铰链连接有第四连接杆(708),所述第四连接杆(708)远离第一连接杆(705)的一端铰链连接有第五连接杆(709),所述第一连接杆(705)一侧中部铰链连接有第六连接杆(710),且第六连接杆(710)与第五连接杆(709)一端铰链连接,所述第五连接杆(709)远离第六连接杆(710)的一端与转动板(703)之间通过铰链连接,所述转动板(703)一端通过转轴连接有驱动电机(711);
2.根据权利要求1所述的一种适用于水陆两栖的无人探测车,其特征在于:所述探测箱(4)内部设置有控制系统箱(9)和蓄电池箱(10),所述控制系统箱(9)内部设置有处理器、无线传输模块和gps定位模块。
3.根据权利要求1所述的一种适用于水陆两栖的无人探测车,其特征在于:所述无人探测车体(1)外壁四周安装有避让传感器和激光测距传感器,所述避让传感器和激光测距传感器与控制系统箱(9)电性连接。
4.根据权利要求1所述的一种适用于水陆两栖的无人探测车,其特征在于:所述无人探测车体(1)外壁上方安装有太阳能板(11),且太阳能板(11)与蓄电池箱(10)之间电性连接。
5.根据权利要求1所述的一种适用于水陆两栖的无人探测车,其特征在于:所述无人探测车体(1)下方两侧安装有移动万向轮(12),所述无人探测车体(1)外壁下方安装有喷水推进器(13)。
6.根据权利要求1所述的一种适用于水陆两栖的无人探测车,其特征在于:所述转动主轴(3)底端安装有旋转电机,且旋转电机位于无人探测车体(1)内部上方。
7.根据权利要求1所述的一种适用于水陆两栖的无人探测车,其特征在于:所述第一连接杆(705)和第二连接杆(706)与第三连接杆(707)之间均铰链连接。
技术总结
本发明公开了一种适用于水陆两栖的无人探测车,具体涉及无人探测车领域,包括无人探测车体,所述无人探测车体上方设置有转动平台,且转动平台通过转动主轴与无人探测车体相连,所述转动平台上方固定连接有探测箱,所述探测箱外壁一侧设置有玻璃窗,所述玻璃窗内侧安装有高清摄像头,所述玻璃窗外壁一侧设置有清理机构,所述清理机构包括第一清理刷、第二清理刷、转动板和固定板,所述固定板位于转动平台内部上方。本发明通过设置清理机构和稳定机构,可以保证在无人探测车在极端天气下的探测工作,同时可以提升无人探测车体在探测时的稳定性,不易发生倾倒的问题,增强用于水陆两栖的无人探测车的抗风性能。
技术研发人员:王辛
受保护的技术使用者:北京绿城自然科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!