一种大型自适应地面水稻直播机组的减振方法
1.本发明主要涉及大型水稻直播机组减振相关技术领域,具体是一种大型自适应地面水稻直播机组的减振方法。
背景技术:
2.目前拖拉机液压悬挂采用机液控制或电液控制,机液控制液压悬挂包括:液压泵、分配器、油缸、液压油箱等,通过操纵杆件实现对农机具的耕深控制;电液控制液压悬挂包括:控制器、操作面板、电控悬挂阀、安装于提升臂侧面的角度传感器等,控制器通过检测传感器的信号,输出控制电控悬挂阀的提升比例阀或下降比例阀,从而实现对农机具的耕深控制。
3.在大型水稻自适应地面直播机组,通常通过三点悬挂挂接大型农机具,整个拖拉机中心后移,在行驶运输的过程中,当拖拉机作业机组行驶在颠簸路面时,俯仰运动,由于挂接的农机具通过三点悬挂刚性地与拖拉机连接为一体,容易受到农机具本身重量的影响,产生绕后轮的前后较强的俯仰冲击,使拖拉机作业机组产生很大的冲击振动,影响拖拉机的安全行驶,对驾驶员的操作舒适性产生很大的影响。降低大型农机具对拖拉机机组的振动冲击,提高其运输安全性能,具有重要意义。通常的方法是在拖拉机机头部位增加配重,使整个作业机组重心前移,增加全轮的附着力。但是采用增加配重的方法,配重的重量毕竟有限,同时不易安装。
技术实现要素:
4.为解决目前技术的不足,本发明在拖拉机电液悬挂系统的基础上,从实际应用出发,提供一种大型自适应地面水稻直播机组的减振方法 ,当拖拉机在行驶过程中,有俯仰冲击时,能够增加阻尼,从而降低农机具对拖拉机的冲击速度,起到主动减振的作用。
5.本发明的技术方案如下:一种大型自适应地面水稻直播机组的减振方法,所述减振方法基于拖拉机电液悬挂系统,包括如下步骤:s1、在拖拉机上设置用于实时测量拖拉机俯仰角速度的倾角传感器,定义拖拉机抬头、沉头时对应的俯仰角速度方向,并设置角速度的死区;s2、在拖拉机电液悬挂系统对应农机具上止点位置以下设置一段减振区域,并取该减振区域的中点位置为平衡点位置;s3、系统减振功能开启时,当检测到拖拉机俯仰角速度在死区内,电液悬挂系统控制农机具处于平衡点位置,当检测到拖拉机俯仰角速度在死区外,则控制电控悬挂阀的比例阀提升或下降实现减振。
6.进一步的,在步骤s2中, 设置减振区域时,上止点位置a对应农具提升最高位置,减振区域s=5%*农机具总的提升范围,农机具总的提升范围=农机具提升最高位置
‑
农机具下降的最低位置,减振下止点位置b=a
‑
s,平衡点位置c=a
‑
s/2。
7.进一步的,在步骤s1中,定义拖拉机抬头时,俯仰角速度为负,沉头时,俯仰角速度为正;在步骤s3中,当检测到俯仰角速度为正且在死区外时,则开启提升比例阀使农机具提升;当检测到俯仰角速度为负且在死区外时,则开启下降比例阀使农机具下降。
8.进一步的,在步骤s3中,提升或下降比例阀时设置相应的减振开度,其中提升比例阀减振开度=提升比例阀最小电流+50毫安,下降比例阀减振开度=下降比例阀最小电流+50毫安。
9.本发明的有益效果:本发明所提供的一种适用于大马力作业机组在行驶运输状态下的减振方法,能够依托现有电液悬挂系统,降低大型农机具在颠簸的过程中,由于惯性力的影响对拖拉机的俯仰振动冲击,提高行驶舒适性,同时改善前轮的附着力,提高行驶安全性。
附图说明
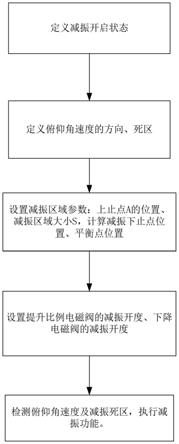
10.附图1为本发明减振方法流程图;附图2为本发明电液提升系统安装示意图;附图3为本发明电液悬挂阀结构示意图;附图4为本发明减振程序流程图。
11.附图中所示标号:1、第一传感器;2、第二传感器;3、控制器;4、电控悬挂阀。
具体实施方式
12.结合附图和具体实施例,对本发明作进一步说明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所限定的范围。
13.本发明是在基于拖拉机电液悬挂的基础之上,提供的一种主动减振方法。参考图2,拖拉机电液悬挂控制器3安装于驾驶室内,第一传感器1为一内置陀螺的倾角传感器,其长边与拖拉机纵向一致,与拖拉机固定安装,可测量拖拉机机体的俯仰角速度及俯仰角度。第二传感器2为提升臂角度传感器,可测量提升臂的倾斜角度。参见图3电控悬挂阀4安装于拖拉机机体上,其p口进油口与拖拉机提升泵的出油口相连,t口与拖拉机液压油箱回油口连接,a口与拖拉机提升油缸的油口连接,拖拉机的有关油路都是成熟的技术,此处不再赘述。
14.参考图4,电液悬挂系统设置一开关量t,该开关量t=1定义为减振状态,该开关量t=0,则非减振开启状态。
15.如图1所示,定义好减振开启状态后,定义第一传感器1输出角速度ω方向,拖拉机作业机组抬头的角速度为负,沉头的角速度为正。设置角速度的死区δ,当
‑
δ<ω<δ时,农机具处于平衡点位置,该死区δ为一定值。
16.之后设置减振区域,拉机电液悬挂系统在农机具上止点位置a以下,设置一段小范围的减振区域s,上止点a位置对应农具提升最高位置,减振区域s=5%*农机具总的提升范围,农机具总的提升范围=农具提升最高位置
‑
农具下降的最低位置。减振区域下止点位置b=a
‑
s,则减振平衡位置c=a
‑
s/2。
17.设置比例阀减振开度,提升比例阀减振开度=提升比例阀最小电流+50毫安;下降比例阀减振开度=下降比例阀最小电流+50毫安。比例阀最小电流:因为比例阀死区的存在,使比例阀开启的最小电流。
18.系统实施检测减振开关t、角速度ω,按照附图4实施减振功能。
19.电液悬挂系统控制器3检测到俯仰角速度为正时,如果俯仰角速度在减振死区内,系统控制农机具恢复到平衡点位置c,如果大于减振死区,则主动微量开启提升比例电磁阀,提升农机具;俯仰角速度为负时,如果俯仰角速度在减振死区内,系统控制农机具恢复到平衡点位置c,如果大于减振死区,则微量开启下降比例电磁阀,下降农机具,通过提升电磁阀和下降电磁阀的微量开启,相当于液压阻尼孔,当有俯仰冲击时,增加了阻尼,降低了农机具对拖拉机的冲击速度,起到主动减振的作用。
技术特征:
1.一种大型自适应地面水稻直播机组的减振方法,所述减振方法基于拖拉机电液悬挂系统,其特征在于,包括如下步骤:s1、在拖拉机上设置用于实时测量拖拉机俯仰角速度的倾角传感器,定义拖拉机抬头、沉头时对应的俯仰角速度方向,并设置角速度的死区;s2、在拖拉机电液悬挂系统对应农机具上止点位置以下设置一段减振区域,并取该减振区域的中点位置为平衡点位置;s3、系统减振功能开启时,当检测到拖拉机俯仰角速度在死区内,电液悬挂系统控制农机具处于平衡点位置,当检测到拖拉机俯仰角速度在死区外,则控制电控悬挂阀的比例阀提升或下降实现减振。2.如权利要求1所述的一种大型自适应地面水稻直播机组的减振方法,其特征在于:在步骤s2中, 设置减振区域时,上止点位置a对应农具提升最高位置,减振区域s=5%*农机具总的提升范围,农机具总的提升范围=农机具提升最高位置
‑
农机具下降的最低位置,减振下止点位置b=a
‑
s,平衡点位置c=a
‑
s/2。3.如权利要求1所述的一种大型自适应地面水稻直播机组的减振方法,其特征在于:在步骤s1中,定义拖拉机抬头时,俯仰角速度为负,沉头时,俯仰角速度为正;在步骤s3中,当检测到俯仰角速度为正且在死区外时,则开启提升比例阀使农机具提升;当检测到俯仰角速度为负且在死区外时,则开启下降比例阀使农机具下降。4.如权利要求3所述的一种大型自适应地面水稻直播机组的减振方法,其特征在于:在步骤s3中,提升或下降比例阀时设置相应的减振开度,其中提升比例阀减振开度=提升比例阀最小电流+50毫安,下降比例阀减振开度=下降比例阀最小电流+50毫安。
技术总结
本发明提供一种大型自适应地面水稻直播机组的减振方法,包括如下步骤:在拖拉机上设置用于测量拖拉机俯仰角速度的倾角传感器,定义拖拉机抬头、沉头时对应的俯仰角速度方向,并设置角速度的死区;对应农机具上止点位置以下设置一段减振区域,并取该减振区域的中点位置为平衡点位置;S3、系统减振功能开启时,当检测到拖拉机俯仰角速度在死区内,电液悬挂系统控制农机具处于平衡点位置,当检测到拖拉机俯仰角速度在死区外,则控制电控悬挂阀的比例阀提升或下降实现减振。本发明能够依托现有电液悬挂系统,降低大型农机具在颠簸的过程中,由于惯性力的影响对拖拉机的俯仰振动冲击,提高行驶舒适性,同时改善前轮的附着力,提高行驶安全性。安全性。安全性。
技术研发人员:杨进超 吴承隆 张诗雨 綦晓腾 闫纪舟 黎超宏 尹修杰
受保护的技术使用者:山东交通学院
技术研发日:2021.04.27
技术公布日:2021/9/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1