垂直起降悬挂动翼倾转飞行电动汽车及起飞降落方法和升降转向方法与流程
本发明属于飞行器制造,具体涉及垂直起降折叠固定翼无人机。
背景技术:
1、现有技术的无人机或载人飞行器大都采用多轴垂直旋翼结构,由于在飞行过程中始终需要旋翼抵抗重力,然后通过倾斜旋翼来控制升降和转向,存在能量损耗大,飞行距离短的缺陷,专利号为zl2015107605993,发明人:刘奥宇、刘思佳,发明名称:飞行电动汽车的技术存在着起飞需要展开机翼,短距离滑行助跑起飞,不方便在公路上有其他车辆的情况下起飞,其他国家发明的飞行汽车也存在类式问题,对此缺陷一直没有很好的解决方案。
技术实现思路
1、本发明的目的是克服现有技术的不足,提供一种能量转换效率高,长航程的垂直起降悬挂动翼倾转飞行电动汽车及起飞降落方法和升降转向方法,包括:车身、悬挂折叠动翼、悬挂折叠动翼与车身之间通过铰链吊环铰接在车身的顶部,前后车轮设置在车身的底盘上、车轮转向系、动力电源设置在车身内、多只倾转推进器设置在车身的两侧和/或前后两端,一智能控制器设置在车身内,智能控制器控制电连接并控制车轮转向系、动力系、刹车机构、和多只倾转推进器,智能控制器具有自动驾驶模式、远程遥控驾驶模式、人工手动操控驾驶模式三种选择模式,智能控制器为设置有plc控制器或ai芯片控制器或神经芯片控制器;
2、垂直起降悬挂动翼倾转飞行电动汽车的起飞方法是:垂直起降悬挂折叠动翼飞行电动汽车通过倾转推进器推进垂直升起并悬停于空中,并在空中展开悬挂折叠动翼,伸缩倾转臂向前行方向倾转带动倾转推进器的旋转面从与水平面夹角从零逐渐加大直至与水平面成90°夹角,垂直起降悬挂折叠动翼飞行电动汽车的飞行速度逐渐加大直至机翼获得的空气动力升力等于垂直起降悬挂折叠动翼飞行电动汽车的重力;
3、垂直起降悬挂动翼倾转飞行电动汽车的降落方法是:在机翼提供升力的飞行状态下,伸缩倾转臂逐渐向上倾转带动倾转推进器的旋转面从与水平面夹角为90°逐渐减小直至与水平面夹角为零,垂直起降悬挂折叠动翼飞行电动汽车的飞行速度逐渐减小直至为零,倾转推进器提供的推进空气动力升力等于垂直起降悬挂折叠动翼飞行电动汽车的重力,并在空中收拢悬挂折叠动翼,倾转推进器逐渐降低转速,直至垂直起降悬挂折叠动翼飞行电动汽车垂直降落地面。
4、垂直起降悬挂动翼倾转飞行电动汽车的空中升降转向方法是:通过电驱动x-y二维驱动器推动悬挂动翼的驱动杆绕铰链吊环的升降转轴转动作前后升降控制、主梁与铰链吊环中间是通过套管转动连接,驱动杆与主梁中间是固定连接,驱动杆驱动主梁在铰链吊环的套管内左右转动控制垂直起降悬挂动翼倾转飞行电动汽车在空中左右转向。
5、进一步优化,车身的外部设置高分辨率相机和/或摄像机和/或激光雷达发射接收装置和/或设置毫米波雷达发射接收装置,一智能控制器设置在车身内,在车身内设置有驾驶座椅、乘客座椅。
6、进一步优化,以及高分辨率相机和/或摄像机和/或激光雷达发射接收装置和/或设置毫米波雷达发射接收装置受控于智能控制器。
7、进一步优化,伸缩倾转臂为可伸缩结构,倾转推进器的桨叶为可折叠结构。
8、进一步优化,车身上设置有避障激光雷达和/或超声波雷达发射和反射接收装置;智能控制器内设置空中交通导航软件和5g/6g信息交换系统。
9、进一步优化,设置在车身的后部设置的水平推进器为电动螺旋桨。
10、进一步优化,设置在车身的后部设置的水平推进器为涡扇发动机或为螺旋桨燃油发动机。
11、有益效果
12、本发明的垂直起降悬挂动翼倾转飞行电动汽车及起降方法和升降转向控制方法,克服了现有飞机需要专用机场才能够辅助飞机起飞降落的技术缺陷,也克服了现有飞行汽车需要在地面展开机翼起飞,着陆后才能悬挂折叠动翼,不能够在车辆密集的公路是原地起飞的弊病,通过垂直起降的电动螺旋桨把飞行电动汽车原地垂直提升到空中后再展开机翼,进入到有翼飞行模式,有翼飞行模式中机翼获得的升力平衡垂直起降悬挂动翼倾转飞行电动汽车的重力,其能源消耗远远小于仅由倾转推进器持续提供竖直方向推升力平衡垂直起降悬挂折叠动翼飞行电动汽车的重力所消耗的能源;同样着陆前飞行电动汽车进入悬停模式,在空中收拢机翼,垂直着陆于公路是或任何路面,空中飞行升降转向控制方法利用倾转推进器控制升降转向灵活的技术特征,可以减小飞行电动汽车控制转向半径和升降距离,提高飞行电动汽车空中操控响应的敏捷性,减少副翼及其机械操控部件,降低飞行电动汽车重量,极大的方便了飞行电动汽车的便利使用,具有较好的应用前景。
技术特征:
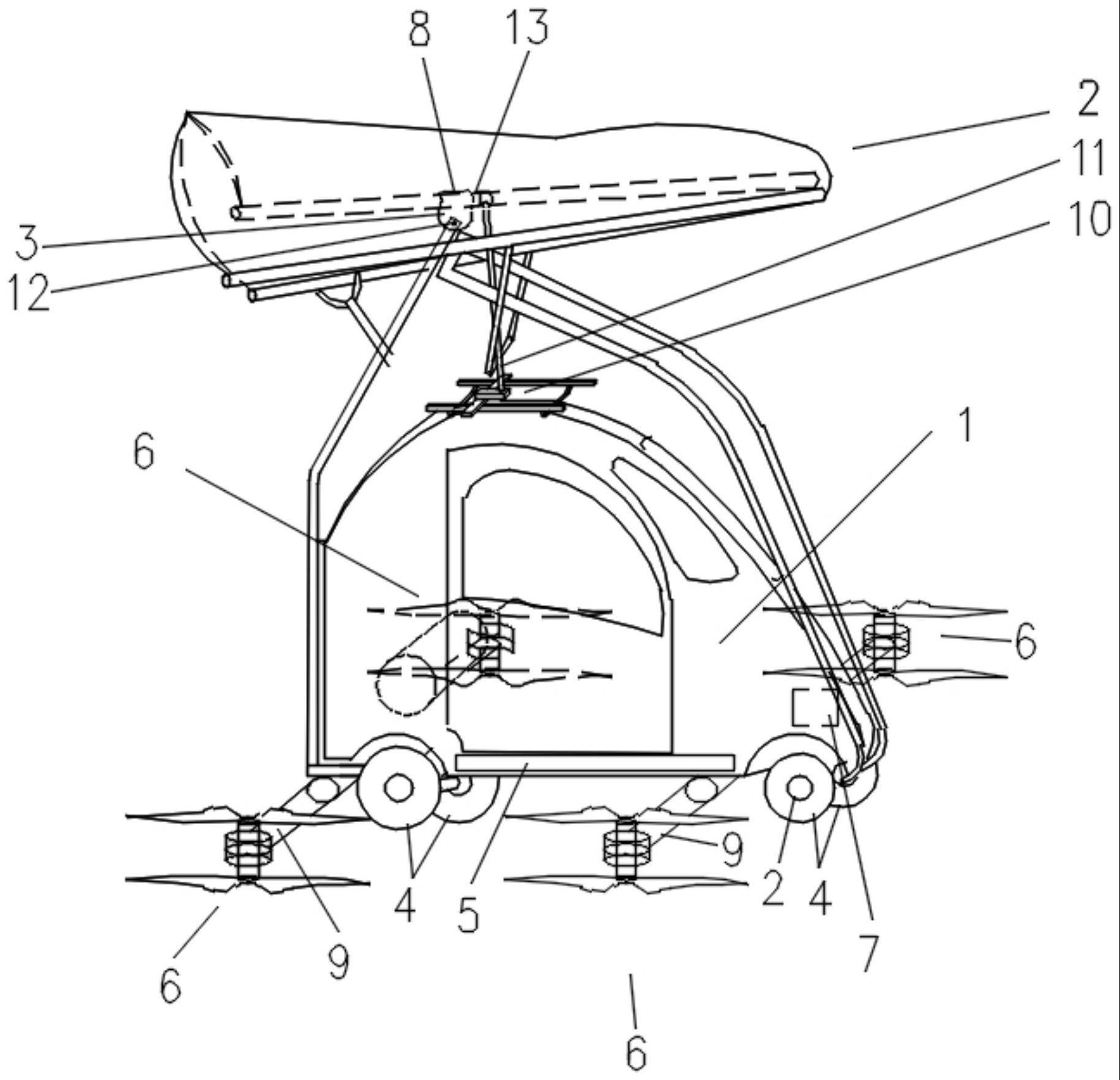
1.垂直起降悬挂动翼倾转飞行电动汽车及起飞降落方法和升降转向方法,其特征在于,包括:车身(1)、悬挂折叠动翼(2)、该悬挂折叠动翼(2)与该车身(1)之间通过悬挂吊环(3)铰接在该车身(1)的顶部,车轮(4)设置在车身(1)的底盘上、车轮转向系、动力电源(5)设置在车身(1)内、多只倾转推进器(6)设置在该车身(1)的两侧和/或前后两端,一智能控制器(7)设置在该车身(1)内,该智能控制器(7)控制电连接并控制车轮转向系、动力系、刹车机构、和多只倾转推进器(6),该智能控制器(7)具有自动驾驶模式、远程遥控驾驶模式、人工手动操控驾驶模式三种选择模式,该智能控制器(7)为设置有plc控制器或a i芯片控制器或神经芯片控制器。
2.根据权利要求1所述的垂直起降悬挂动翼倾转飞行电动汽车及起飞降落方法和升降转向方法,其特征在于:该车身(1)的外部设置高分辨率相机和/或摄像机和/或激光雷达发射接收装置和/或设置毫米波雷达发射接收装置,一智能控制器(7)设置在车身(1)内,在该车身(1)内设置有驾驶座椅、乘客座椅。
3.根据权利要求1或2所述的垂直起降悬挂动翼倾转飞行电动汽车及起飞降落方法和升降转向方法,其特征在于:以及高分辨率相机和/或摄像机和/或激光雷达发射接收装置和/或设置毫米波雷达发射接收装置受控于该智能控制器(7)。
4.根据权利要求1所述的垂直起降悬挂动翼倾转飞行电动汽车及起飞降落方法和升降转向方法,其特征在于:该倾转臂(9)为可伸缩结构,该倾转推进器(6)的桨叶为可结构。
5.根据权利要求1所述的垂直起降悬挂动翼倾转飞行电动汽车及起飞降落方法和升降转向方法,其特征在于软件。
6.根据权利要求1所述的垂直起降悬挂动翼倾转飞行电动汽车及起飞降落方法和升降转向方法,其特征在于:机身上设置有避障激光雷达和/或超声波雷达发射和反射接收装置;该智能控制器(7)内设置空中交通导航软件和5g/6g信息交换系统。
7.根据权利要求1所述的垂直起降悬挂动翼倾转飞行电动汽车及起飞降落方法和升降转向方法,其特征在于:设置在车身(1)的后部设置的水平推进器为电动螺旋桨。
8.根据权利要求1所述的垂直起降悬挂动翼倾转飞行电动汽车及起飞降落方法和升降转向方法,其特征在于:设置在车身(1)的后部设置的水平推进器为涡扇发动机或为螺旋桨燃油发动机。
9.垂直起降悬挂动翼倾转飞行电动汽车的倾转起飞方法是:垂直起降悬挂动翼飞行电动汽车通过该倾转推进器(6)推进垂直升起并悬停于空中,并在空中展开悬挂折叠动翼(2),该倾转臂(9)向前行方向倾转带动倾转推进器(6)的旋转面从与水平面夹角从零逐渐加大直至与水平面成90°夹角,该垂直起降悬挂动翼飞行电动汽车的飞行速度逐渐加大直至机翼获得的空气动力升力等于垂直起降悬挂动翼飞行电动汽车的重力;
10.垂直起降悬挂动翼倾转飞行电动汽车的空中升降转向方法是:通过电驱动x-y二维驱动器(10)推动驱动杆(11)绕悬挂吊环(3)的升降转轴(12)转动作前后升降控制、主梁(13)与悬挂吊环中间是通过套管(14)转动连接,驱动杆(11)与主梁(13)中间是固定连接,电驱动x-y二维驱动器(10)推动驱动杆(11),驱动杆(11)驱动主梁(13)在悬挂吊环(3)的套管内左右转动控制垂直起降悬挂动翼飞行电动汽车在空中左右转向。
技术总结
垂直起降悬挂动翼飞行电动汽车及起飞降落方法和升降转向方法,包括:车身、悬挂折叠动翼、悬挂折叠动翼与车身之间通过悬挂铰链铰接在车身的顶部,前后车轮设置在车身的底盘上、车轮转向系、动力电源设置在车身内、多只倾转推进器设置在车身的两侧和/或前后两端,一智能控制器设置在车身内,智能控制器控制电连接并控制车轮转向系、动力系、刹车机构、和多只倾转推进器,智能控制器具有自动驾驶模式、远程遥控驾驶模式、人工手动操控驾驶模式三种选择模式,智能控制器为设置有PLC控制器或AI芯片控制器或神经芯片控制器,倾转臂倾转带动倾转推进器垂直升降和水平推进飞行。
技术研发人员:刘奥宇
受保护的技术使用者:武汉发明家创新科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!