一种应用于小车机器人的可重构轮履复合式车轮
1.本发明属于机器人领域,具体涉及一种应用于小车机器人的可重构轮履复合式车轮。
技术背景
2.随着科技的发展和时代的进步,越来越多的危险重复的工作交给了机器人来完成。随着机器人的日益发展,机器人已经在军事、防灾救援、星际探索等各个方面有了重要位置。移动机器人作为机器人学的重要分支,其移动机构研究也十分收到重视。传统移动机器人行走机构主要有轮式、履带式和腿式。其各有优缺点,其中轮式速度快、结构简单但越障能力较差。履带式越障能力出色但不灵活其履带容易磨损能量消耗大。腿式最为灵活但行走速度慢。所以为了解决这些缺陷,近些年出现了轮腿式、履腿式、轮履腿式等复合移动机构。这些结构一定程度的增大了移动机器人对地形的适应性。但较高的环境适应性是用更大的重量、更复杂的结构和更更大的能量消耗换取的。针对以上移动机器人高机动性、强通过性和低能耗难以兼容的问题提出一种基于可重构车轮技术的新型轮履复合式移动机构方案。在不改变原有车轮尺寸和重量的基础上,该新型可重构车轮能够在圆形(轮式)和类三角形(履带)之间自主转换。使普通机器人或越野车可以通过更换原本车轮的方法在不失去原本机动性的前提下获得更优秀的复杂路面通过性。
技术实现要素:
3.有鉴于此,本发明提供了一种应用于小车机器人的可重构轮履复合式车轮。
4.为解决上述技术问题,本发明采取了如下技术方案:
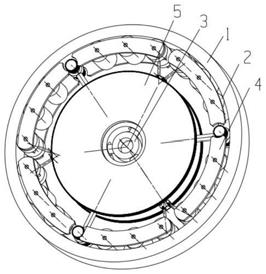
5.一种应用于小车机器人的可重构轮履复合式车轮,其特征在于,包括:履带1、承重轮2、液压变形装置3、履带保持架4和行星齿轮传动机构5;所述履带1固定在可重构车轮轮体外侧,所述履带1在所述液压变形机构3和所述行星齿轮机构5的共同作用下进行轮式和履带模式之间转换。
6.优选的,所述承重轮2包括:普通承重轮201和顶角承重轮202。
7.优选的,所述液压变形机构3由两个所述中心液压缸302与两组共六根所述液压顶杆301构成。
8.优选的,所述液压变形机构3包括:液压顶杆301、中心液压缸302、连接器安装座303、承重轮连接器304和行星轮305;所述一组液压杆301末端与所述连接器安装座303相连,所述连接器安装座303与所述承重轮连接器304通过销轴相连,所述承重轮连接器304与所述顶角承重轮202相连;所述另一组液压杆301通过销轴与所述履带保持架4相连。
9.优选的,所述履带保持架4有两组。
10.优选的,所述所述行星齿轮机构5包括:太阳轮501和行星轮502,所述太阳轮501通过转动轴和联轴器与车轴相连,所述行星轮502安装在两组所述履带保持架4中间与所述履带1啮合。
11.优选的,所述行星齿轮机构5包含一个所述太阳轮501和三个所述行星轮502。
12.优选的,所述每组两个所述履带保持架4上安装两个所述普通承重轮201和一个所述顶角承重轮202,相邻两组所述履带保持架4中间通过所述行星轮305外圈的轴承相连,且可以绕所述行星轮305进行旋转。
13.优选的,所述履带保持架4外侧为圆弧状,且每两组所述履带保持架4上安装有七个所述承重轮2,所述承重轮2按圆周分布。
14.本发明相对于现有技术取得了以下技术效果:
15.本发明通过可重构车轮将轮式和履带式车轮相结合,使其可以通过液压变形机构切换车轮形态,以满足在铺装路面的告诉移动和在复杂地形下的高通过性。
附图说明
16.图1为本发明一种应用于小车机器人的可重构轮履复合式车轮的轮式运动模式示意图。
17.图2为本发明一种应用于小车机器人的可重构轮履复合式车轮的履带运动模式示意图。
18.图3为本发明一种应用于小车机器人的可重构轮履复合式车轮的履带保持架示意图。
19.图4为本发明一种应用于小车机器人的可重构轮履复合式车轮的液压变形机构及行星齿轮机构示意图。
20.图中:1、履带;2、承重轮;3、液压变形装置;4、履带保持架;5、行星齿轮传动机构;201、普通承重轮;202、顶角承重轮;302、中心液压缸;301、液压顶杆;303、连接器安装座;304、承重轮连接器;305、行星轮;501、太阳轮;502行星轮。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.实施例1:
23.本发明提供了一种新型轮履复合可重构车轮,用于复杂地形环境下需要随时变换行走方式的移动底盘中,可根据需要实现轮履转换包括履带保持架,液压变形机构,行星齿轮机构
24.可重构车轮具有三种运动模式
25.轮式运动模式:应用场景为正常道路上或较平坦道路上。如图液压变形装置3收缩拉动履带保持架4回收,履带保持架4成圆形,此时车辆动力由车轴传递至可重构车轮,带动整体旋转从而驱动车辆前进。
26.履带运动模式:应用场景为在崎岖或泥泞道路上行驶。如图.液压装置3将履带保持架4推出然后锁死,整体成类三角形,同时随着履带保持架4的旋转,两节保持架4中间的行星轮502会于内侧的太阳轮501啮合。此时车辆动力由车轴传递至太阳轮503,经与之啮合
的行星轮502传输从而将动力传递至履带1。
27.过度运动模式:该模式是行进中两个模式转换时的过渡模式。当轮式模式转换为履带模式时,液压杆301做工将履带保持架4一端顶起。此时车轮整体与车轴脱开链接,履带1根据惯性继续向前运动,而液压变形机构3由于自身重心原因会自动旋转至履带运动模式的位置。随后液压杆301继续做工直至行星轮502和太阳轮501啮合,此时变形完成。当履带模式转换为轮式模式时,液压杆301回收带动履带保持架4旋转从而使行星轮502和太阳轮501随之脱开。此时履带1根据惯性继续向前运动直至整体变形至圆形与车轴啮合。此时整体随着车轴旋转从而实现行进间变形。
28.以上所述,仅是本发明较佳实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施案例所作的任何细微修改、等同变化与装饰,均仍属于本发明技术方案的范围内。
技术特征:
1.一种应用于小车机器人的可重构轮履复合式车轮,其特征在于,包括:履带(1)、承重轮(2)、液压变形装置(3)、履带保持架(4)和行星齿轮传动机构(5);所述履带(1)固定在可重构车轮轮体外侧,所述履带(1)在所述液压变形机构(3)和所述行星齿轮机构(5)的共同作用下进行轮式和履带模式之间转换。2.根据权利要求1所述的一种应用于小车机器人的可重构轮履复合式车轮,其特征在于,所述承重轮(2)包括:普通承重轮(201)和顶角承重轮(202)。3.根据权利要求1
‑
2所述的一种应用于小车机器人的可重构轮履复合式车轮,其特征在于,所述液压变形机构(3)由两个所述中心液压缸(302)与两组共六根所述液压顶杆(301)构成。4.根据权利要求1所述的一种应用于小车机器人的可重构轮履复合式车轮,其特征在于,所述液压变形机构(3)包括:液压顶杆(301)、中心液压缸(302)、连接器安装座(303)、承重轮连接器(304)和行星轮(305);所述一组液压杆(301)末端与所述连接器安装座(303)相连,所述连接器安装座(303)与所述承重轮连接器(304)通过销轴相连,所述承重轮连接器(304)与所述顶角承重轮(202)相连;所述另一组液压杆(301)通过销轴与所述履带保持架(4)相连。5.根据权利要求1所述的一种应用于小车机器人的可重构轮履复合式车轮,其特征在于,所述履带保持架(4)有两组。6.根据权利要求1所述的一种应用于小车机器人的可重构轮履复合式车轮,其特征在于,所述行星齿轮机构(5)包括:太阳轮(501)和行星轮(502),所述太阳轮(501)通过转动轴和联轴器与车轴相连,所述行星轮(502)安装在两组所述履带保持架(4)中间与所述履带(1)啮合。7.根据权利要求6所述的一种应用于小车机器人的可重构轮履复合式车轮,其特征在于,所述行星齿轮机构(5)包含一个所述太阳轮(501)和三个所述行星轮(502)。8.根据权利要求1所述的一种应用于小车机器人的可重构轮履复合式车轮,其特征在于,每组两个所述履带保持架(4)上安装两个所述普通承重轮(201)和一个所述顶角承重轮(202),相邻两组所述履带保持架(4)中间通过所述行星轮(305)外圈的轴承相连,且可以绕所述行星轮(305)进行旋转。9.根据权利要求1所述的一种应用于小车机器人的可重构轮履复合式车轮,其特征在于,所述履带保持架(4)外侧为圆弧状,且每两组所述履带保持架(4)上安装有七个所述承重轮(2),所述承重轮(2)按圆周分布。
技术总结
本发明公开了一种应用于小车机器人的可重构轮履复合式车轮,包括:履带、承重轮、液压变形装置、履带保持架和行星齿轮传动机构;所述履带固定在可重构车轮轮体外侧,所述履带在所述液压变形机构和所述行星齿轮机构的共同作用下进行轮式和履带模式之间转换。本发明通过将轮式和履带式车轮相结合,使其可以通过液压变形机构切换车轮形态,以满足在铺装路面的告诉移动和在复杂地形下的高通过性。告诉移动和在复杂地形下的高通过性。告诉移动和在复杂地形下的高通过性。
技术研发人员:张鹏超 芦浩南 张政武 许斌 张智军
受保护的技术使用者:陕西理工大学
技术研发日:2021.07.21
技术公布日:2021/10/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1