一种车辆主动避障系统的制作方法
1.本发明涉及智能汽车领域,特别涉及一种车辆主动避障系统。
背景技术:
2.近年来,世界范围内的汽车保有量不断攀升,这使得能源短缺、环境污染和交通堵塞等问题进一步恶化,智能电动车辆凭借其在节能与环保、提高道路通行效率方面的显著优势已成为未来汽车发展的重要趋势。
3.在车辆电动化、智能化的背景下,越来越多的电子电气部件被运行到车辆上,目前一些高端车辆上已装配有一百多个电子控制单元和数百个与之相连的传感器和执行器,并有数千种信号通过车载网络进行传输。随着电子电气组件数量的增加和组件之间的互联程度的提高,智能电动车辆的电子电气架构变得越来越复杂。基于域的电子电气系架构,可将智能电动车辆中的多种组件和功能运行在一起,有利于简化功能设计和解决不断增加的软件和硬件工作量问题,已被学术界和产业界视为车辆电子电气架构的革命性更新。
4.传统汽车在面对地面障碍物或空中的障碍物时,无法做出紧急避障反应,对车辆底盘或车顶会造成一定的损伤。
5.所以,针对现有技术存在的不足,有必要设计一种车辆主动避障系统,基于域的电气架构,将电动车辆中的多种组件和功能运行在一起,以解决上述问题。
技术实现要素:
6.为克服上述现有技术中的不足,本发明目的在于提供一种车辆主动避障系统。
7.为实现上述目的及其他相关目的,本发明提供的技术方案是:一种车辆主动避障系统,包括底盘域控制器,以及和所述底盘域控制器连接的悬架电控执行装置和至少一个传感器,所述底盘域控制器用于根据接收的所述传感器采集的信号,结合车辆的底盘及车身零件特性固有参数进行运算并生成执行控制指令,控制所述悬架电控执行装置执行避障动作。
8.优选的技术方案为:所述传感器包括有源相控阵雷达、毫米波雷达、加速度传感器和高度传感器中的一种或多种。
9.优选的技术方案为:所述悬架电控执行装置包括至少四个连续性可调阻尼的减振器,所述减震器和所述底盘域控制器连接。
10.优选的技术方案为:所述底盘及车身各零件特性固有参数包括车辆的建模参数和底盘各零件的建模参数。
11.由于上述技术方案运用,本发明具有的有益效果为:本发明通过底盘域控制器接收传感器采集的信号,结合车辆的底盘及车身零件特性固有参数,进行运算并生成执行控制指令,控制悬架电控执行装置执行避障动作,可主动避免路面障碍和空中障碍,避免底盘或车顶受损。
附图说明
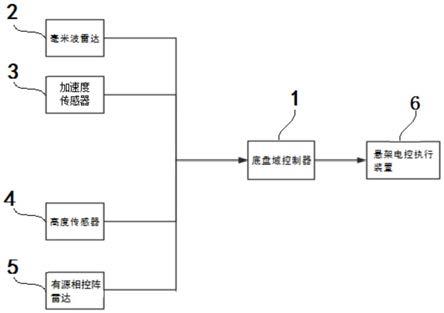
12.图1为本发明示意图。
13.以上附图中,1、底盘域控制器;2、毫米波雷达;3、加速度传感器;4、高度传感器;5、有源相控阵雷达;6、悬架电控执行装置。
具体实施方式
14.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
15.请参阅图1。须知,在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
16.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
17.实施例:如图1所示,为本发明提出的一种车辆主动避障系统,包括底盘域控制器1、若干传感器和悬架电控执行装置6。
18.底盘域控制器1分别和悬架电控执行装置6以及至少一个传感器连接;其中,底盘域控制器1用于根据接收的传感器采集的信号,结合车辆的底盘及车身零件特性固有参数(包括车辆的建模参数和底盘各零件的建模参数),进行运算并生成执行控制指令,控制悬架电控执行装置6执行避障动作。
19.进一步的,传感器包括有源相控阵雷达5、毫米波雷达2、加速度传感器3和高度传感器4中的一种或多种。
20.其中,有源相控阵雷达5用于感知道路上动态障碍物的方向、位置和高度;毫米波雷达2,用于感知道路上动态障碍物的方向和位置;加速度传感器3,用于采集实际车体垂向加速度;高度传感器4,用于测量所述动态障碍物或所述静态障碍物的离地高度。
21.进一步的,悬架电控执行装置6包括电机、液压泵和举升油缸,底盘域控制器1接收传感器采集的信号,结合车辆的底盘及车身零件特性固有参数,进行运算并生成执行控制指令,通过电机驱动液压泵工作,切换油路来调节四个轮子举升油缸的升降(通过缸内的压力差达到阻尼的调节)。
22.所以,本发明具有以下优点:
本发明通过底盘域控制器接收传感器采集的信号,结合车辆的底盘及车身零件特性固有参数,进行运算并生成执行控制指令,控制悬架电控执行装置执行避障动作,可主动避免路面障碍和空中障碍,避免底盘或车顶受损。
23.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神和技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
技术特征:
1.一种车辆主动避障系统,其特征在于:包括底盘域控制器,以及和所述底盘域控制器连接的悬架电控执行装置和至少一个传感器,所述底盘域控制器用于根据接收的所述传感器采集的信号,结合车辆的底盘及车身零件特性固有参数进行运算并生成执行控制指令,控制所述悬架电控执行装置执行避障动作。2.根据权利要求1所述的一种车辆主动避障系统,其特征在于:所述传感器包括有源相控阵雷达、毫米波雷达、加速度传感器和高度传感器中的一种或多种。3.根据权利要求1所述的一种车辆主动避障系统,其特征在于:所述悬架电控执行装置包括至少四个连续性可调阻尼的减振器,所述减震器和所述底盘域控制器连接。4.根据权利要求1所述的一种车辆主动避障系统,其特征在于:所述底盘及车身各零件特性固有参数包括车辆的建模参数和底盘各零件的建模参数。
技术总结
本发明提供一种车辆主动避障系统,包括底盘域控制器,以及和所述底盘域控制器连接的悬架电控执行装置和至少一个传感器,所述底盘域控制器用于根据接收的所述传感器采集的信号,结合车辆的底盘及车身零件特性固有参数进行运算并生成执行控制指令,控制所述悬架电控执行装置执行避障动作。本发明通过底盘域控制器接收传感器采集的信号,结合车辆的底盘及车身零件特性固有参数,进行运算并生成执行控制指令,控制悬架电控执行装置执行避障动作,可主动避免路面障碍和空中障碍,避免底盘或车顶受损。损。损。
技术研发人员:姜镇军 王锦琨 付勇
受保护的技术使用者:苏州盖茨电子科技有限公司
技术研发日:2021.09.01
技术公布日:2021/10/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1