防撞越障脚轮的制作方法
本发明涉及一种机器人或设备脚轮,特别涉及一种从动轮脚轮。
背景技术:
1、现有脚轮基本都是单轮或者并排双轮的形式,在机器人行业中广泛使用,以及工厂中基本都能看到它的身影。单轮或双轮脚轮对场地要求苛刻,使现有的脚轮无法满足越障需求。如送餐机器人上楼或下楼,需要经过电梯,既要越过障碍,又要防止撞到电梯门或电梯壁而较为平稳的过去。现有市面的脚轮在越过障碍时容易造成整体抖动,不能实现顺滑越障功能。
技术实现思路
1、本发明的目的是提供防止碰撞、越过障碍、平稳的防撞越障脚轮。
2、本发明防撞越障脚轮,包括脚轮和支架,脚轮设置至少3组,中间组脚轮与两边组脚轮存在垂直地面方向的高度差和平行于地面方向的偏心距。
3、最优地,脚轮设置3组。
4、优选地,中间组脚轮的高度高于边组脚轮,从脚轮前进方向看,脚轮整体呈现倒立的“凹”字形。
5、优选地,中间组脚轮位置比两边组脚轮靠前,也就是二者之间在水平方向上存在一个偏心距。
6、优选地,中间组脚轮与两边组脚轮高度差占轮胎直径的比例小于2/5。
7、优选地,中间组脚轮与两边组脚轮高度差不小于3mm。
8、优选地,中间组脚轮与边组脚轮的高度差和水平方向的偏心距大小可调节。根据不同场景和客户需要,可以调节高度差和水平方向的偏心距。
9、优选地,支架通过轴承与脚轮相连。
10、优选地,支架包括侧板,侧板上设置两个或两个以上的轴承孔,脚轮通过轴承设置在轴承孔内。轴承孔设置在不同的高度和水平方向不同的前后位置上,使得脚轮设置在不同的轴承孔内,会得到不同的高度差和水平方向的偏心距。
11、优选地,脚轮轮胎采用pu材料。
12、本发明适用于机器人脚轮驱动轮,通过高低差实现设备以及机器人的越障碍功能,有效降低振动,可平稳通过小于轮胎直径2/5高度的台阶,经过测试,效果较好。
技术特征:
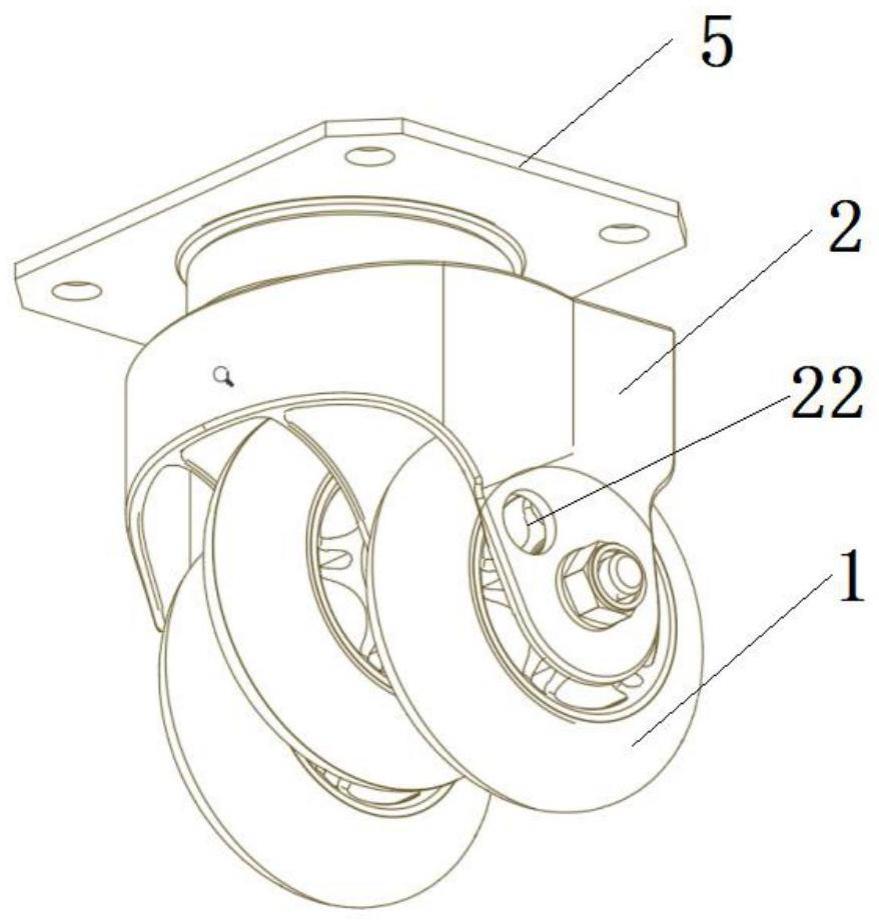
1.一种防撞越障脚轮,包括脚轮(1)和支架(2),其特征在于:所述脚轮(1)设置至少3组,所述脚轮(1)包括中间组脚轮(12)和两边组脚轮(11),所述中间组脚轮(12)和所述两边组脚轮(11)存在垂直地面方向(b)的高度差和平行于地面方向(a)的偏心距。
2.根据权利要求1所述的防撞越障脚轮,其特征在于:所述脚轮(1)设置3组。
3.根据权利要求1或2所述的防撞越障脚轮,其特征在于:所述中间组脚轮(12)的高度高于所述边组脚轮(11)。
4.根据权利要求3所述的任一项防撞越障脚轮,其特征在于:所述中间组脚轮(12)位置比两所述边组脚轮(11)靠前。
5.根据权利要求4所述的任一项防撞越障脚轮,其特征在于:所述中间组脚轮(12)与两所述边组脚轮(11)高度差占轮胎直径的比例小于2/5。
6.根据权利要求5所述的防撞越障脚轮,其特征在于:所述中间组脚轮(12)与两所述边组脚轮(11)高度差不低于3mm。
7.根据权利要求6所述的防撞越障脚轮,其特征在于:所述中间组脚轮(12)与所述边组脚轮(11)的高度差和水平方向的偏心距大小可调节。
8.根据权利要求7所述的防撞越障脚轮,其特征在于:所述支架(2)通过轴承(3)与所述脚轮(1)相连。
9.根据权利要求8所述的防撞越障脚轮,其特征在于:所述支架(2)包括侧板(21),所述侧板(21)上设置两个或两个以上的轴承孔(22),所述脚轮(1)通过轴承(3)设置在所述轴承孔(22)内。
10.根据权利要求9所述的防撞越障脚轮,其特征在于:所述脚轮轮胎采用pu材料。
技术总结
本发明涉及一种防撞越障脚轮,包括脚轮(1)和支架(2),其特征在于:所述脚轮(1)设置至少3组,所述脚轮(1)包括中间组脚轮(12)和两边组脚轮(11),所述中间组脚轮(12)和所述两边组脚轮(11)存在垂直地面方向(B)的高度差和平行于地面方向(A)的偏心距。本发明防止碰撞、能越过障碍且通过平稳。
技术研发人员:许家文
受保护的技术使用者:上海屹上脚轮有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!