制动/驱动力控制方法及制动/驱动力控制装置与流程
本发明涉及一种制动/驱动力控制方法及制动/驱动力控制装置。
背景技术:
1、在下述专利文献1中,记载了如下车辆:在加速器踏板的操作量比规定的操作量大时产生驱动力,在加速器踏板的操作量比规定的操作量小时产生减速驱动力,由此,仅通过加速器踏板的操作就能够加速、减速。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2000-205015号公报
5、发明要解决的课题
6、在上述那样的车辆中,除了车辆驱动力源的减速驱动力之外,为了能够产生与制动器踏板的操作对应的减速度,而具备根据制动器踏板的操作产生减速度的摩擦制动器。在这样的车辆中,当驾驶员将脚从加速器踏板离开后操作制动器踏板时,由于在操作制动器踏板之前车辆已经产生了减速度,因此有时会给驾驶员带来不适感。
技术实现思路
1、本发明的目的在于,在根据加速器踏板的操作量产生驱动力和减速驱动力的制动/驱动力控制装置中,减轻制动器踏板操作时驾驶员的不适感。
2、在本发明的一方式的制动/驱动力控制方法中,检测加速器踏板的行程量即加速器行程量,在加速器行程量大于规定的第一行程量时,计算使车辆驱动力源产生的驱动力,在加速器行程量小于第一行程量以下的第二行程量时,计算使车辆驱动力源产生的减速驱动力,控制车辆驱动力源以产生计算出的驱动力和减速驱动力,根据驾驶员对制动器踏板的踏入操作,使车轮产生制动力,根据计算出的减速驱动力,控制制动器踏板的行程量即制动器行程量。
3、发明效果
4、根据本发明,在根据加速器踏板的操作量产生驱动力和减速驱动力的制动/驱动力控制装置中,能够减轻制动器踏板操作时驾驶员的不适感。
5、本发明的目的和优点通过权利请求的范围所示的要素及其组合来体现和实现。应当理解,前述一般描述和以下详细描述都仅是示例和说明,而不是如权利请求的范围那样对本发明进行限制。
技术特征:
1.一种制动/驱动力控制方法,是控制车辆的制动/驱动力的控制器的制动/驱动力控制方法,其特征在于,
2.如权利要求1所述的制动/驱动力控制方法,其特征在于,
3.如权利要求1或2所述的制动/驱动力控制方法,其特征在于,
4.如权利要求1或2所述的制动/驱动力控制方法,其特征在于,
5.如权利要求3或4所述的制动/驱动力控制方法,其特征在于,
6.如权利要求1~5中任一项所述的制动/驱动力控制方法,其特征在于,
7.一种制动/驱动力控制装置,其特征在于,具备:
8.如权利要求7所述的制动/驱动力控制装置,其特征在于,
9.如权利要求8所述的制动/驱动力控制装置,其特征在于,
10.如权利要求7~9中任一项所述的制动/驱动力控制装置,其特征在于,
11.如权利要求7~9中任一项所述的制动/驱动力控制装置,其特征在于,
12.如权利要求10或11所述的制动/驱动力控制装置,其特征在于,
技术总结
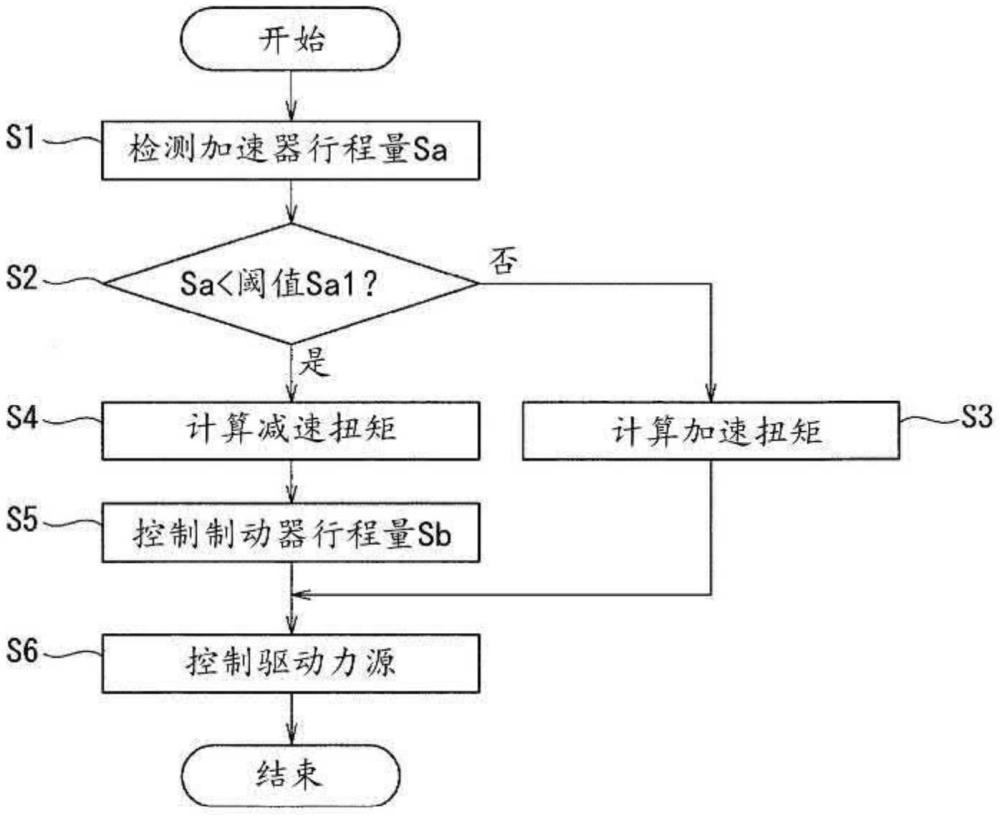
本发明的制动/驱动力控制方法中,检测加速器踏板的行程量即加速器行程量(S1),在加速器行程量大于规定的第一行程量时,计算使车辆驱动力源产生的驱动力(S3),在加速器行程量小于被设定为第一行程量以下的值的第二行程量时,计算使车辆驱动力源产生的减速驱动力(S4),控制车辆驱动力源以产生计算出的驱动力及减速驱动力(S6),根据驾驶员对制动器踏板的踏入操作而使车轮产生制动力,根据计算出的减速驱动力,控制制动器踏板的行程量即制动器行程量(S5)。
技术研发人员:须合谦
受保护的技术使用者:日产自动车株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!