用于运载工具状态估计的系统、方法以及介质与流程
本公开涉及用于运载工具状态估计的系统、方法以及介质。
背景技术:
1、自动驾驶运载工具需要能够确定或估计当前运载工具状态,诸如加速度和速度等,使得自动驾驶运载工具可以适当地控制自身。然而,由于包括成本、复杂性、重量等的各种原因,这种运载工具可能仅包括有限数量的传感器。因此,准确地确定或估计这种自动驾驶运载工具的当前运载工具状态可能是具有挑战性的。
技术实现思路
1、根据本公开的一方面,提供一种用于运载工具状态估计的系统,包括:至少一个处理器;以及存储器,其上存储有指令,所述指令在由所述至少一个处理器执行时使所述至少一个处理器:接收由一个或多于一个传感器生成的传感器数据,所述传感器数据至少指示与运载工具相关联的横向加速度值和与所述运载工具相关联的转向角;基于由所述传感器数据指示的所述转向角和所述横向加速度值,计算与所述运载工具相关联的侧偏刚度值;基于所述侧偏刚度值来预测与所述运载工具相关联的横向速度值;以及至少通过将所述横向速度值输入到递归滤波器中来提供指示所述运载工具的当前状态的运载工具状态变量集合。
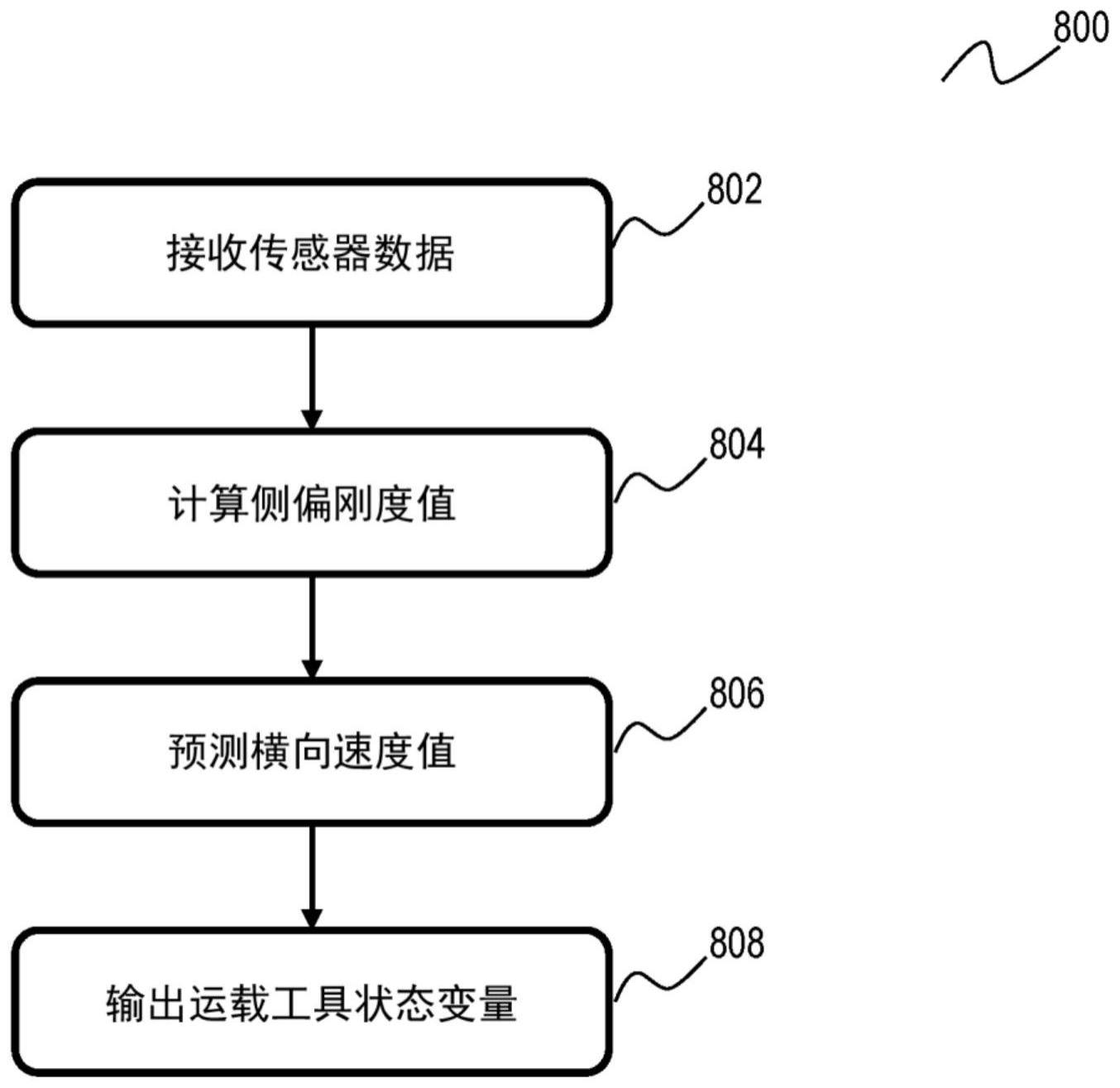
2、根据本公开的另一方面,提供一种用于运载工具状态估计的方法,包括:接收由一个或多于一个传感器生成的传感器数据,所述传感器数据至少指示与运载工具相关联的横向加速度值和与所述运载工具相关联的转向角;基于由所述传感器数据指示的所述转向角和所述横向加速度值,计算与所述运载工具相关联的侧偏刚度值;基于所述侧偏刚度值来预测与所述运载工具相关联的横向速度值;以及至少通过将所述横向速度值输入到递归滤波器中来输出指示所述运载工具的当前状态的运载工具状态变量集合。
3、根据本公开的另一方面,提供至少一个非暂时性存储介质,其存储有指令,所述指令在由包括处理器的计算系统执行时使所述计算系统:接收由一个或多于一个传感器生成的传感器数据,所述传感器数据至少指示与运载工具相关联的横向加速度值和与所述运载工具相关联的转向角;基于由所述传感器数据指示的所述转向角和所述横向加速度值,计算与所述运载工具相关联的侧偏刚度值;基于所述侧偏刚度值来预测与所述运载工具相关联的横向速度值;以及至少通过将所述横向速度值输入到递归滤波器中来输出指示所述运载工具的当前状态的运载工具状态变量集合。
技术特征:
1.一种用于运载工具状态估计的系统,包括:
2.根据权利要求1所述的系统,其中,所述至少一个处理器还被配置为使得使用指示所述运载工具的当前状态的所述运载工具状态变量集合来控制所述运载工具的移动。
3.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为使得使用指示所述运载工具的当前状态的所述运载工具状态变量集合在放弃对人类驾驶员辅助的依赖情况下自主地控制所述运载工具的移动。
4.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为基于所述传感器数据来预测与所述运载工具相关联的前向速度值,并且将所述前向速度值输入到所述递归滤波器中。
5.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为基于所述传感器数据来预测与所述运载工具相关联的横向力值和法向力值,并且至少部分地基于所述横向力值和所述法向力值来计算所述侧偏刚度值。
6.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为确定要对所述传感器数据进行偏差去除处理,并且在使用所述传感器数据来计算所述侧偏刚度值之前对所述传感器数据进行所述偏差去除处理。
7.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为基于所述运载工具状态变量集合来更新所述侧偏刚度值。
8.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为基于更新的侧偏刚度值来更新所述横向速度值。
9.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为基于更新的横向速度值来更新所述运载工具状态变量集合。
10.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为定期地更新所述侧偏刚度值,并且还基于更新的侧偏刚度值来更新所述横向速度值。
11.根据前述权利要求中任一项所述的系统,其中,所述侧偏刚度值包括前侧偏刚度值和后侧偏刚度值。
12.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为将所述运载工具状态变量集合输出到以下各系统其中至少之一:
13.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为使用运动学自行车模型来预测与所述运载工具相关联的所述横向速度值。
14.根据前述权利要求中任一项所述的系统,其中,所述至少一个处理器还被配置为基于由各自不同于全球定位系统传感器即gps传感器的一个或多于一个传感器所生成的传感器数据来预测所述横向速度值。
15.根据前述权利要求中任一项所述的系统,还包括至少一个传感器,所述至少一个传感器被配置为生成所述传感器数据。
16.一种用于运载工具状态估计的方法,包括:
17.根据权利要求16所述的方法,还包括:
18.根据前述权利要求中任一项所述的方法,还包括:
19.至少一个非暂时性存储介质,其存储有指令,所述指令在由包括处理器的计算系统执行时使所述计算系统:
20.根据权利要求19所述的至少一个非暂时性存储介质,其中,所述指令在由所述计算系统执行时还使所述计算系统:
技术总结
本公开涉及用于运载工具状态估计的系统、方法以及介质。提供了用于基于传感器数据的运载工具状态估计的方法,其可以包括:接收由一个或多于一个传感器生成的传感器数据,计算与运载工具相关联的侧偏刚度值,基于侧偏刚度值来预测与运载工具相关联的横向速度值,以及至少通过将横向速度值输入到递归滤波器中来输出指示运载工具的当前状态的运载工具状态变量集合。所描述的一些方法还包括基于运载工具状态变量集合来更新侧偏刚度值,基于更新的侧偏刚度值来更新横向速度值,以及基于更新的横向速度值来更新运载工具状态变量集合。还提供了系统和计算机程序产品。
技术研发人员:A·H·E-沙伊尔,董一萌,孙鲁冬
受保护的技术使用者:动态AD有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!