车辆转向行驶控制装置的制作方法
本发明涉及一种控制装置,尤其涉及一种车辆转向行驶控制装置。
背景技术:
1、近年来,提供对于也考虑了交通参与人中老年人或儿童等处于弱势立场的人的可持续输送系统的存取的努力正在活跃化。为了实现所述目的,通过与车辆的行为稳定性有关的开发而致力于更进一步改善交通的安全性或便利性的研究开发。
2、针对车辆转向或受到干扰时,需要对车体的姿势进行控制,使车辆可以稳定地行驶。目前的技术是基于车速与操舵速度来计算目标横摆动量(yaw moment),并将其横摆动量添加至车辆中,以进行改善横摆追随性的控制。
技术实现思路
1、可是,在目前的技术上,虽然可以提高横摆响应的追随性,但难以同时提高横摆阻尼性能。
2、在车辆的行驶稳定性中,如何同时解决车辆转向时横摆响应的追随性以及横摆阻尼性能的问题是本领域设计者的课题。
3、鉴于以上方面,本案为了解决所述课题而以达成在提高车辆转向时横摆响应的追随性的同时,也提高横摆阻尼性能为目的。而且,进而有助于发展可持续输送系统。
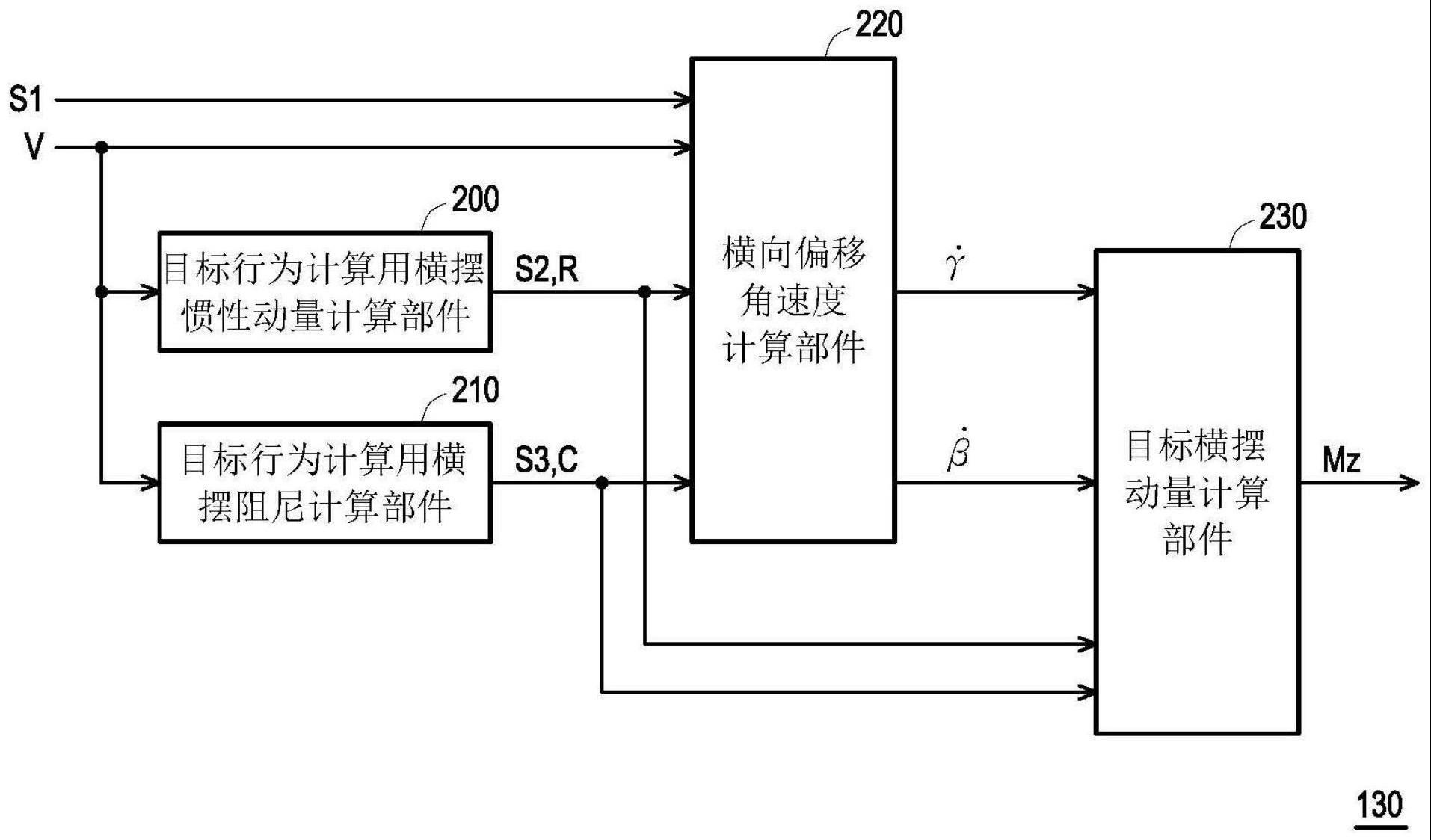
4、为了达成所述目的,本发明是一种车辆转向行驶控制装置。车辆转向行驶控制装置包括操作状态检测装置、车速检测装置以及目标横摆动量计算装置。操作状态检测装置检测驾驶员的车辆的操作状态量。车速检测装置检测车辆的车速。目标横摆动量计算装置基于操作状态量以及车速来计算车辆的目标横摆动量。目标横摆动量计算装置包括横摆惯性动量计算部件、横摆阻尼计算部件、横向偏移角速度计算部件以及目标横摆动量计算部件。横摆惯性动量计算部件基于在车辆转向时由车速检测装置检测到的车速来计算横摆惯性动量。横摆阻尼计算部件基于在车辆转向时由车速检测装置检测到的车速来计算横摆阻尼。横向偏移角速度计算部件基于横摆惯性动量以及横摆阻尼来计算横向偏移角速度。目标横摆动量计算部件基于横向偏移角速度来计算车辆的目标横摆动量。横摆惯性动量计算部件根据基于由车速检测装置检测到的车速的第一补正量来计算横摆惯性动量。横摆阻尼计算部件根据基于由车速检测装置检测到的车速的第二补正量来计算横摆阻尼。
5、根据所述结构,通过基于目标行为计算用横摆惯性动量与目标行为计算用横摆阻尼的横向偏移角速度来计算车辆转向时的目标横摆动量,由此提高了车辆转向时的响应性,同时提高了横摆追随性,即使在高车速下,也可计算具有良好横摆阻尼特性的目标横摆动量。特别是使用按照车速而适当设定的各个补正量来计算目标行为计算用横摆惯性动量以及目标行为计算用横摆阻尼,能够计算出按照车辆的行驶状况的适当的目标横摆动量。
6、在本发明的一实施例中,在车速小于第一阈值时第一补正量被设定成第一规定值,在车速为第一阈值以上时第一补正量被设定成小于第一规定值的第二规定值。
7、根据所述结构,通过使用基于车速计算的第一补正量来计算目标横摆动量,可计算出使横摆追随性提高的目标横摆动量。
8、在本发明的一实施例中,在车速小于第二阈值时第二补正量被设定成第三规定值,在车速为第二阈值以上时第二补正量被设定成大于第三规定值的第四规定值。
9、根据所述结构,通过使用基于车速计算的第二补正量来计算目标横摆动量,即使在高车速下也可计算出具有良好横摆阻尼特性的目标横摆动量
10、在本发明的一实施例中,横向偏移角速度计算部件通过以操作状态量、车速、横摆惯性动量以及横摆阻尼为要素的车体模型来计算横向偏移角速度。车体模型能够基于操作状态量以及车速来计算横摆角加速度。目标横摆动量计算部件基于横向偏移角速度以及横摆角加速度来计算目标横摆动量。
11、根据所述结构,通过使用车体模型计算横向偏移角速度以及横摆角加速度,且基于横向偏移角速度以及横摆角加速度计算目标横摆动量,提高了车辆转向时的响应性,同时提高了横摆追随性,即使在高车速下,也可计算具有良好横摆阻尼特性的目标横摆动量。
12、基于上述,本发明的车辆转向行驶控制装置提高了车辆转向时的响应性,同时提高了横摆追随性,即使在高车速下,也可计算具有良好横摆阻尼特性的目标横摆动量。在基于车体模型而改善横摆(yaw)运动的横摆率前馈控制中,通过添加横摆动量来提高横摆阻尼性能,横摆动量是利用用于提高横摆阻尼性能的横摆阻尼系数以及车体横向偏移角速度所计算出来的。
13、为让本发明的上述特征和优点能更明显易懂,下文特举实施方式,并配合附图作详细说明如下。
技术特征:
1.一种车辆转向行驶控制装置,其特征在于,包括:
2.根据权利要求1所述的车辆转向行驶控制装置,其特征在于,在所述车速小于第一阈值时所述第一补正量被设定成第一规定值,在所述车速为所述第一阈值以上时所述第一补正量被设定成小于所述第一规定值的第二规定值。
3.根据权利要求2所述的车辆转向行驶控制装置,其特征在于,在所述车速小于第二阈值时所述第二补正量被设定成第三规定值,在所述车速为所述第二阈值以上时所述第二补正量被设定成大于所述第三规定值的第四规定值。
4.根据权利要求1至3中任一项所述的车辆转向行驶控制装置,其特征在于,所述横向偏移角速度计算部件通过以所述操作状态量、所述车速、所述横摆惯性动量以及所述横摆阻尼为要素的车体模型来计算所述横向偏移角速度,
技术总结
本发明提供一种车辆转向行驶控制装置,包括操作状态检测装置、车速检测装置以及目标横摆动量计算装置。在目标横摆动量计算装置中,横摆惯性动量计算部件基于在车辆转向时的车速来计算横摆惯性动量。横摆阻尼计算部件基于在车辆转向时的车速来计算横摆阻尼。横向偏移角速度计算部件基于横摆惯性动量与横摆阻尼来计算横向偏移角速度。目标横摆动量计算部件基于横向偏移角速度来计算车辆的目标横摆动量。横摆惯性动量计算部件根据第一补正量来计算横摆惯性动量。横摆阻尼计算部件根据第二补正量来计算横摆阻尼。
技术研发人员:大久保直人,小山亮
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!