控制运载工具的系统、方法及机器可读介质与流程
本公开涉及一种控制运载工具的系统和方法。
背景技术:
1、运载工具的安全性能正受到广泛关注。防碰撞系统已被开发,用于检测对于运载工具可见/可检测的危险目标。
2、然而,在运载运行侧方方向上的危险目标可能隐藏在其他运载工具后面,以使得该目标可能不能被该运载工具检测到,直到其突然出现在该运载工具前方。短的反应时间可能造成碰撞。
技术实现思路
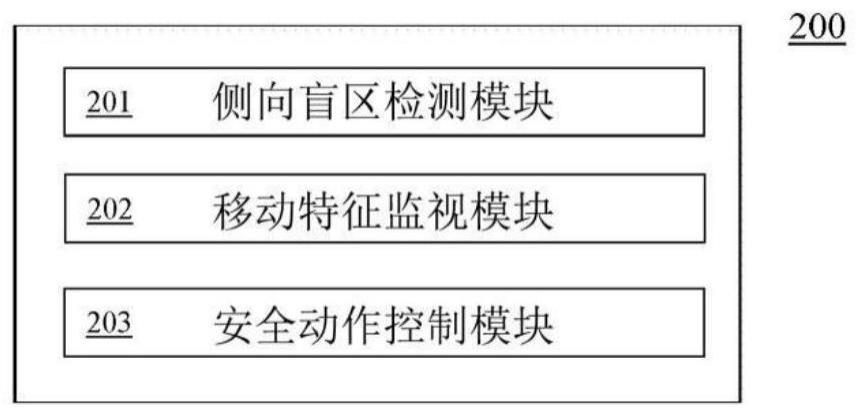
1、本公开的一方面在于一种控制运载工具执行安全动作的系统,该系统包括:侧向盲区检测模块,被配置为确定由于第二运载工具在第一运载工具的侧向方向上的遮蔽而形成了所述第一运载工具的侧向盲区;移动特征监视模块,被配置为响应于该侧向盲区被确定来监视该第二运载工具的移动特征;以及安全动作控制模块,被配置为基于该第二运载工具的被监视到的该移动特征来控制该第一运载工具执行安全动作。
2、本公开的另一方面在于一种控制运载工具执行安全动作的方法,该方法包括:检测由第二运载工具在第一运载工具的移动轨迹的侧向方向上造成的该第一运工具的侧向盲区;响应于检测到该第一运载工具的侧向盲区,监视该第二运载工具的移动特征;并且基于该第二运载工具的被监视到的移动特征来控制该第一运载工具执行安全动作。
3、本公开的再一方面在于一种存储有指令集的机器可读介质,当该指令集由处理器执行时,使该处理器:检测由第二运载工具在第一运载工具的侧面造成的该第一运载工具的侧向盲区;响应于检测到该第一运载工具的侧向盲区,监视该第二运载工具的移动特征;分析检测到的该第二运载工具的移动特征,以评估该侧向盲区内的危险事件;并且响应于该第二运载工具的移动特征中的特定移动特征来控制该第一运载工具执行安全动作。
技术特征:
1.一种能够在第一运载工具不与第二运载工具进行通信的情况下控制所述第一运载工具执行安全动作的系统,所述系统包括:
2.根据权利要求1所述的系统,所述系统被配置为:响应于检测到所述第二运载工具的移动特征与所述环境以第一等级匹配,所述安全动作控制模块使所述第一运载工具执行对应于所述侧向盲区不存在危险目标的第一等级的安全动作并且不使所述第一运载工具减速。
3.根据权利要求1至2中的任一项所述的系统,其中,检测包括可能使所述第二运载工具减速的所述因素的环境包括检测所述第二运载工具前方的障碍物。
4.根据权利要求1所述的系统,其中,所述安全动作包括以下项中的一项或多项:
5.根据权利要求1所述的系统,其中,所述系统进一步包括调节模块,所述调节模块被配置为调节被监视到的所述第二运载工具的移动特征与要被所述第一运载工具的安全动作控制模块执行的安全动作之间的映射。
6.一种能够在第一运载工具不与第二运载工具进行通信的情况下控制所述第一运载工具执行安全动作的方法,所述方法包括:
7.根据权利要求5所述的方法,其中,所述控制包括:(1)如果所述第二运载工具的移动特征与所述环境以第一等级匹配,则控制所述第二运载工具执行对应于所述侧向盲区不存在危险目标的第一等级的安全动作,该第一等级的安全动作包括不使所述第一运载工具减速。
8.根据权利要求6所述的方法,进一步包括:当所述第一运载工具在行人横穿马路经常发生的区域中时,使特定移动特征对应更高等级的安全动作。
9.根据权利要求6所述的方法,进一步包括:基于用户输入的当前设定或预定义的策略来调节要被所述第一运载工具执行的安全动作与所述第二运载工具的移动特征之间的映射。
10.一种存储有指令的机器可读介质,当所述指令由处理器执行时,使所述处理器执行根据权利要6至9中的任意一项所述的方法。
技术总结
一种控制运载工具执行安全动作的系统及其方法,所述系统包括:侧向盲区检测模块,被配置为确定由于第二运载工具在第一运载工具的侧向方向上的遮蔽而形成了所述第一运载工具的侧向盲区;移动特征监视模块,被配置为响应于所述侧向盲区被确定来监视所述第二运载工具的移动特征;以及安全动作控制模块,被配置为基于所述第二运载工具的被监视到的所述移动特征来控制所述第一运载工具执行安全动作。
技术研发人员:赵婷婷
受保护的技术使用者:赵婷婷
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!