速度规划方法及装置、控制设备、车辆、存储介质与流程
本发明涉及自动驾驶,尤其涉及一种速度规划方法、速度规划装置、以及控制设备、包括控制设备的车辆和存储介质。
背景技术:
1、人工智能是利用数字计算机或数字计算机控制的机器模拟、延伸和扩展人的智能,感知环境、获取知识并使用知识获得最佳结果的理论、方法、技术及应用系统。自动驾驶是人工智能领域的一种主流应用,自动驾驶技术依靠计算机视觉、雷达、监控装置和全球定位系统等协同合作,让机动车辆可以在不需要人类主动操作下,实现自动驾驶。
2、在自动驾驶技术领域,目前主要的关键技术包括自主定位、环境感知、行为决策、轨迹规划、运动控制等,速度规划作为轨迹规划的一个重要环节,其是指为自动驾驶车辆规划一条未来一段时间长度内的速度曲线,该速度曲线的好坏决定了对驾驶车辆的运动控制的安全性和驾驶动作的舒适性,如纵向驾驶动作的舒适性,甚至横向驾驶动作的舒适性等。目前常用的速度规划方法一般是首先将障碍物的预测轨迹与自车路径进行碰撞检测,在有碰撞时根据其预测轨迹投影生成对应的障碍物st图(障碍物与自车的距离时间图,如图1所示为左侧车辆根据其预测轨迹投影出来的st图,根据其预测轨迹左侧障碍物车辆在t1时刻后切入到自车前方s1米处),之后再基于障碍物的st图采用动态规划或者数值优化等方法,求得一条与障碍物的st图没有交集的s-t曲线,最后再通过对该曲线求一阶导/二阶导,得到对应的v-t曲线/a-t曲线。然而,这些常用的速度规划方法中用到的st图仅考虑单帧障碍物的st图(障碍物与自车的距离时间图),对障碍物的预测轨迹的质量要求比较高,而对障碍物的预测轨迹的质量也依赖感知识别精度及稳定性等。因此,在对障碍物的预测轨迹质量不高或感知识别模块产生误差时,利用障碍物的预测轨迹投影出来的障碍物st图进行实时速度规划,就很容易导致前后帧速度规划结果的突变,造成急刹等不良现象,影响自动驾驶的舒适性。
技术实现思路
1、本发明实施例提供一种速度规划方案,以解决现有技术中基于障碍物的精准实时预测轨迹投影出的st图进行速度规划导致的对感知识别精度和稳定性的高度依赖、容易产生前后帧速度规划结果的突变,造成急刹的问题。
2、第一方面,本发明实施例提供一种速度规划方法,所述方法包括
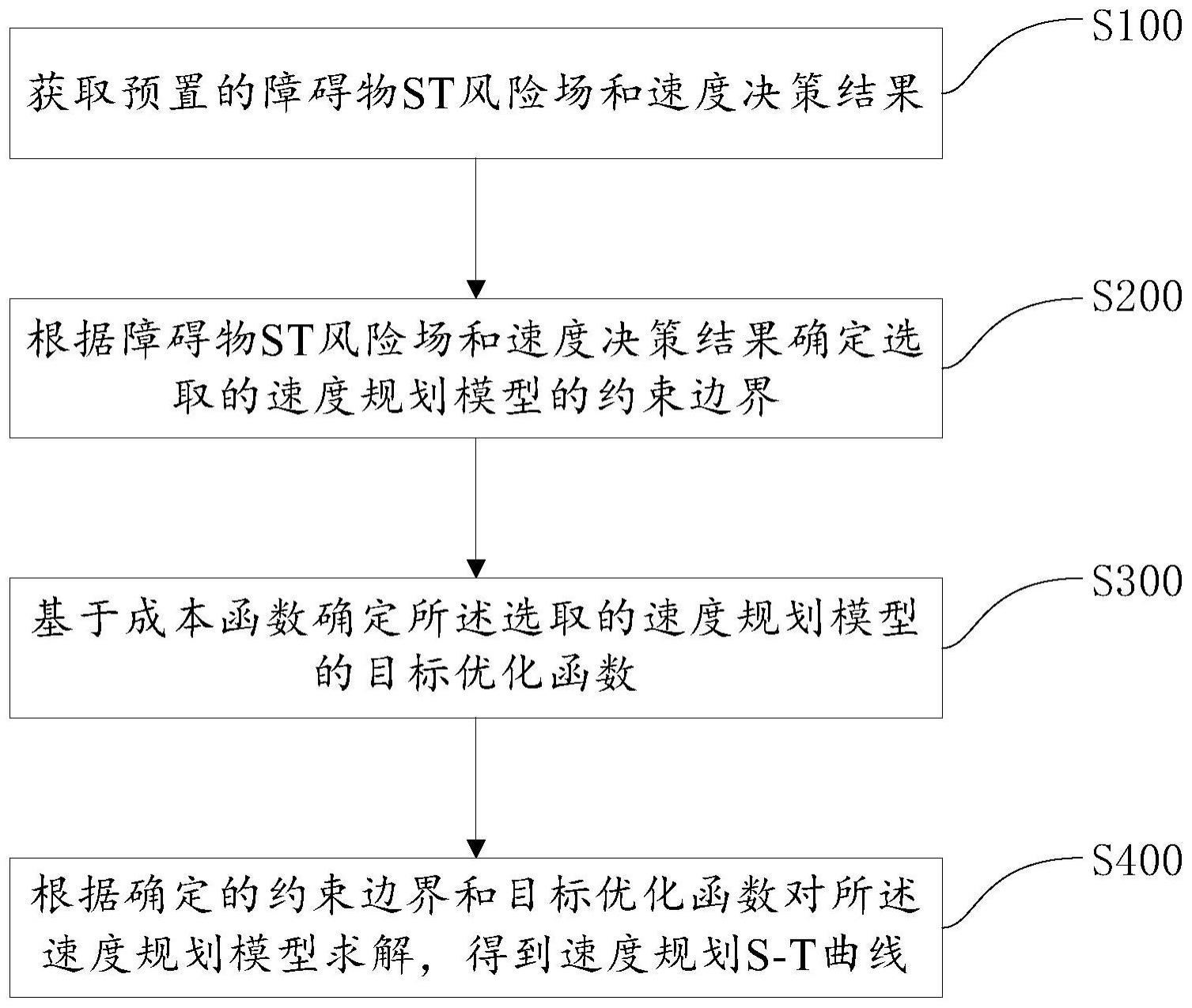
3、获取预置的障碍物st风险场和速度决策结果,其中所述障碍物st风险场为预先根据障碍物的多帧预测信息构建得到;
4、根据所述障碍物st风险场和所述速度决策结果确定选取的速度规划模型的约束边界;
5、基于成本函数确定所述速度规划模型的目标优化函数;
6、根据所述约束边界和目标优化函数对所述速度规划模型求解,得到速度规划s-t曲线。
7、第二方面,本发明实施例提供一种速度规划装置,所述装置包括
8、数据获取模块,用于获取预置的障碍物st风险场和速度决策结果,其中所述障碍物st风险场为预先根据障碍物的多帧预测信息构建得到;
9、约束条件确定模块,用于根据所述障碍物st风险场和所述速度决策结果确定选取的速度规划模型的约束边界;
10、优化目标确定模块,用于基于成本函数确定所述速度规划模型的目标优化函数;和
11、曲线生成模块,用于根据所述约束边界和目标优化函数对所述速度规划模型求解,得到速度规划s-t曲线输出。
12、第三方面,本发明实施例提供了另一种速度规划装置,其包括:
13、存储器,用于存储可执行指令;以及
14、处理器,用于执行存储器中存储的可执行指令,所述可执行指令在由所述处理器执行时实现上述方法的步骤。
15、第四方面,本发明实施例提供了一种控制设备,其包括:
16、规划器,用于根据权利要求上述的方法进行速度规划;和
17、控制器,用于根据所述规划器确定的速度规划s-t曲线对车辆进行速度控制。
18、第五方面,本发明提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述方法的步骤。
19、第六方面,本发明提供了一种车辆,其包括上述第四方面所述的控制设备。
20、第七方面,本发明提供了一种所述计算机程序产品包括存储在非易失性计算机可读存储介质上的计算机程序,所述计算机程序包括程序指令,当所述程序指令被计算机执行时,使所述计算机执行上述的速度规划方法。
21、本发明实施例的有益效果在于:本发明实施例提供的方法利用基于障碍物多帧预测信息预先构建形成的障碍物st风险场进行速度规划,特别是在进行约束边界确定时,是基于该障碍物st风险场和前置模块输出的速度决策结果来确定约束边界,使得确定的约束条件中同时考虑了障碍物的多帧预测信息,对障碍物位置的不确定性进行了模糊化,因而基于该约束条件规划出的速度s-t曲线能够保证前后帧变化的一致性,避免了因实时预测轨迹精准度不高产生的前后帧速度规划结果突变的不良和输入抖动对速度规划结果的影响,并且有效降低了预测结果波动对车辆行驶速度的影响,提高了系统的容错能力和自动驾驶的舒适性。
技术特征:
1.一种速度规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述成本函数至少包括使得所述速度规划模型定义的速度规划s-t曲线尽可能远离障碍物的第一成本函数。
3.根据权利要求2所述的方法,其特征在于,所述障碍物st风险场构建为标记有各栅格点的障碍物占据概率的st概率栅格地图,所述第一成本函数是基于所述障碍物st风险场中的各栅格点的坐标和障碍物占据概率构建形成的。
4.根据权利要求2所述的方法,其特征在于,所述成本函数还包括使得所述速度规划模型定义的速度规划s-t曲线尽可能平滑的第二成本函数。
5.根据权利要求1至4任一项所述的方法,其特征在于,所述速度决策结果是基于所述障碍物st风险场生成的由多个离散st点组成的速度决策s-t曲线;
6.根据权利要求5所述的方法,其特征在于,所述根据所述障碍物st风险场中的s轴坐标值、各栅格点的障碍物占据概率和速度决策s-t曲线中的离散st点确定所述速度规划模型的约束边界,具体包括:
7.根据权利要求6所述的方法,其特征在于,所述约束边界包括第一约束边界和第二约束边界,所述根据每个时刻t对应的st点的s轴坐标值sref、障碍物st风险场中的s轴坐标值、各栅格点的障碍物占据概率和概率阈值pmax确定所述速度规划模型的约束边界,具体包括:
8.一种速度规划装置,其特征在于,所述装置包括:
9.一种速度规划装置,其特征在于,包括:
10.一种控制设备,其特征在于,包括:
11.一种车辆,其特征在于,包括如权利要求10所述的控制设备。
12.一种存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-7中任意一项所述方法的步骤。
13.一种计算机程序产品,所述计算机程序产品包括存储在非易失性计算机可读存储介质上的计算机程序,所述计算机程序包括程序指令,当所述程序指令被计算机执行时,使所述计算机执行权利要求1-7中任意一项所述的方法。
技术总结
本发明公开一种速度规划方法及装置,方法包括获取预置的障碍物ST风险场和速度决策结果,其中所述障碍物ST风险场为预先根据障碍物的多帧预测信息构建得到;根据所述障碍物ST风险场和速度决策结果确定选取的速度规划模型的约束边界;基于成本函数确定选取的速度规划模型的目标优化函数;根据确定的约束边界和目标优化函数对所述速度规划模型求解,得到速度规划S‑T曲线。本发明的方案能够保证前后帧变化的一致性,避免了因实时预测轨迹精准度不高产生的前后帧速度规划结果突变的不良和输入抖动对速度规划结果的影响,并且有效降低了预测结果波动对车辆行驶速度的影响,提高了系统的容错能力和自动驾驶的舒适性。
技术研发人员:潘青贵,徐成,张放,王肖,霍舒豪,李晓飞,张德兆
受保护的技术使用者:北京智行者科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!