车辆定位异常检查方法及行车电脑与流程
本发明是关于一种车辆定位异常检查方法及行车电脑。
背景技术:
1、通常,汽车进场维修或保养都是发生在汽车的里程数增加5000公里、汽车的仪表板亮起警示灯,或是发生车祸等的情况下。目前市面上有很多车厂已经开始贩售电动车,而自动驾驶车也正在研发当中。然而,不论是一般的汽油车、电动车或自动驾驶车,都是在遇到上述条件时才进行保养。换言之,驾驶通常都仅能在汽车进厂保养甚或是发生车祸时才能发现车辆有异常状况,汽车的安全性仍然不足。
技术实现思路
1、鉴于上述,本发明的一或多个实施例提供一种以解决上述问题的车辆定位异常检查方法及行车电脑。
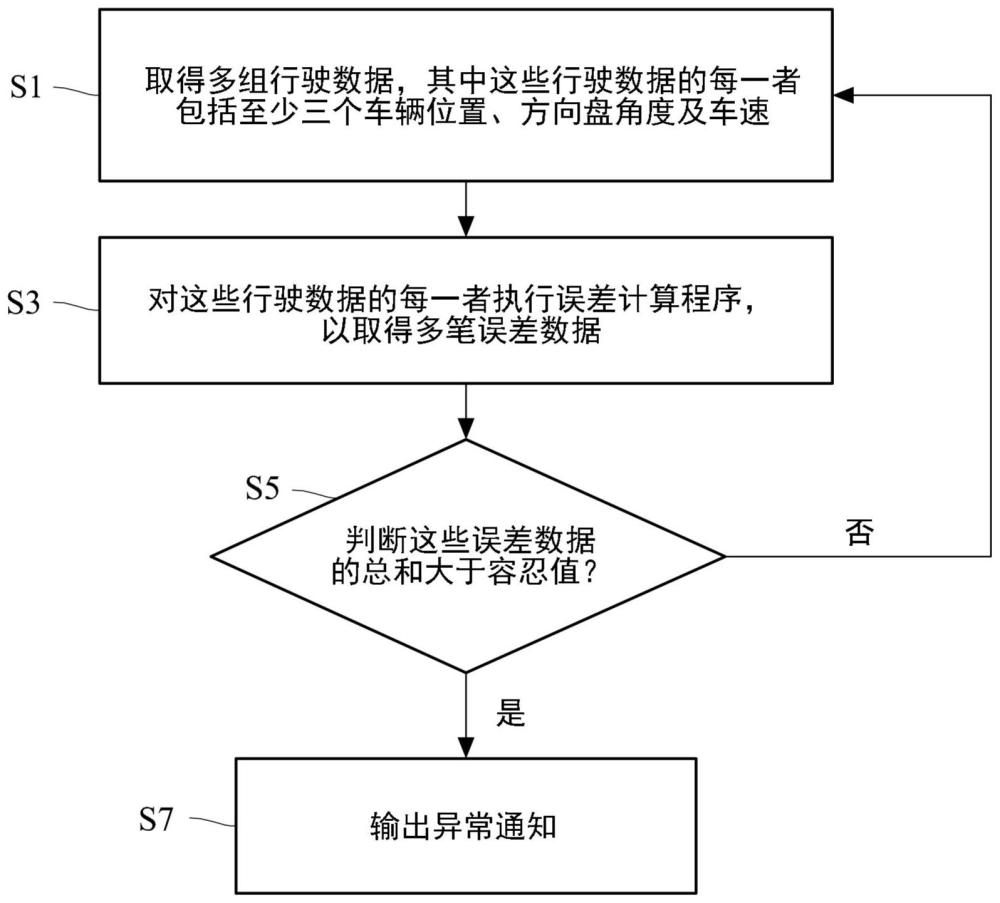
2、依据本发明一实施例的一种车辆定位异常检查方法,执行于处理装置,该方法包括:取得多组行驶数据,其中这些行驶数据的每一者包括至少三个车辆位置、方向盘角度及车速;对这些行驶数据的每一者执行误差计算程序,以取得多笔误差数据。在对所有行驶数据执行误差计算程序后,该方法还包括:响应于这些误差数据的总和大于容忍值,输出异常通知。
3、依据本发明一实施例的一种行车电脑,包括:控制器区域网络以及处理装置。控制器区域网络用于自车辆取得多组行驶数据,其中这些行驶数据的每一者包括至少三个车辆位置、方向盘角度及车速。处理装置连接于控制器区域网络,处理装置用于从控制器区域网络取得这些行驶数据,及对这些车辆行驶数据的每一者执行误差计算程序,以取得多笔误差数据。在对所有行驶数据执行误差计算程序后,处理装置响应于这些误差数据的总和大于容忍值,输出异常通知。
4、综上所述,依据本发明一或多个实施例所示的车辆定位异常检查方法及行车电脑,可实现车辆的即时自我检测的功能,并于判断车辆的四轮定位有异常时输出异常通知,以让驾驶及车厂能在车辆未进厂保养时即可判知四轮定位有异常。因此,能够为自动驾驶车的领域带来提升安全性的益处。
5、以上的关于本公开内容的说明及以下的实施方式的说明是用以示范与解释本发明的精神与原理,并且提供本发明的权利要求更进一步的解释。
技术特征:
1.一种车辆定位异常检查方法,执行于一处理装置,该方法包括:
2.如权利要求1所述的车辆定位异常检查方法,其中该误差计算程序包括:
3.如权利要求2所述的车辆定位异常检查方法,其中判断该预测位置与该车辆的该目标位置之间的该差异包括:
4.如权利要求2所述的车辆定位异常检查方法,其中该至少三个车辆位置包括一第一车辆位置、一第二车辆位置及该目标位置,该第一车辆位置对应于一第一时间戳,该第二车辆位置、该车速及该方向盘角度置对应于一第二时间戳,该预测位置及该目标位置对应于一第三时间戳;以及
5.如权利要求2所述的车辆定位异常检查方法,其中该至少三个车辆位置包括一第一车辆位置、接续于该第一车辆位置的一第二车辆位置及该目标位置,该移动方向是从该第一车辆位置到该第二车辆位置的方向,依据该移动方向、该车速与该方向盘角度取得该预测位置包括:
6.如权利要求2所述的车辆定位异常检查方法,其中该至少三个车辆位置包括一第一车辆位置、接续于该第一车辆的一第二车辆位置及该目标位置,该移动方向是从该第一车辆位置到该第二车辆位置的方向,依据该移动方向、该车速与该方向盘角度取得该预测位置包括:
7.如权利要求6所述的车辆定位异常检查方法,其中依据该方向盘角度与该前向方位角判断相对于该移动方向的该偏移方向包括:
8.如权利要求2所述的车辆定位异常检查方法,其中在对该车辆的所述行驶数据的每一者执行该误差计算程序之前,该方法更包括:
9.如权利要求2所述的车辆定位异常检查方法,其中在对该车辆的所述行驶数据的每一者执行该误差计算程序之前,该方法更包括:
10.如权利要求2所述的车辆定位异常检查方法,其中依据该至少三个车辆位置取得该移动方向包括:
11.一种行车电脑,包括:
12.如权利要求11所述的行车电脑,其中该误差计算程序包括:
13.如权利要求12所述的行车电脑,其中该处理装置执行判断该预测位置与该车辆的该目标位置之间的该差异包括:
14.如权利要求12所述的行车电脑,其中该至少三个车辆位置包括一第一车辆位置、一第二车辆位置及该目标位置,该第一车辆位置对应于一第一时间戳,该第二车辆位置、该车速及该方向盘角度置对应于一第二时间戳,该预测位置及该目标位置对应于一第三时间戳;以及
15.如权利要求12所述的行车电脑,其中该至少三个车辆位置包括一第一车辆位置、接续于该第一车辆的一第二车辆位置及该目标位置,该移动方向是从该第一车辆位置到该第二车辆位置的向量,该处理装置执行依据该移动方向、该车速与该方向盘角度取得该预测位置包括:
16.如权利要求12所述的行车电脑,其中该至少三个车辆位置包括一第一车辆位置、接续于该第一车辆的一第二车辆位置及该目标位置,该处理装置执行依据该移动方向、该车速与该方向盘角度取得该预测位置包括:
17.如权利要求16所述的行车电脑,其中该处理装置执行依据该方向盘角度与该前向方位角判断相对于该移动方向的该偏移方向包括:该处理装置以该方向盘角度与该前向方位角之和作为该偏移方向。
18.如权利要求12所述的行车电脑,更包括一定位组件连接于该处理装置,该定位组件用于取得一起点位置,其中在对该车辆的所述行驶数据的每一者执行该误差计算程序之前,该处理装置更执行:
19.如权利要求12所述的行车电脑,其中在对该车辆的所述行驶数据的每一者执行该误差计算程序之前,该处理装置更执行:
20.如权利要求12所述的行车电脑,其中该处理装置执行依据该至少三个车辆位置取得该移动方向包括:
技术总结
一种车辆定位异常检查方法,执行于处理装置,该方法包括:取得多组行驶数据,其中这些行驶数据的每一者包括至少三个车辆位置、方向盘角度及车速,对这些行驶数据的每一者执行误差计算程序,以取得多笔误差数据,及响应于这些误差数据的总和大于容忍值输出异常通知。本发明的一实施例更提供一种行车电脑。
技术研发人员:丁东昇
受保护的技术使用者:纬创资通股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!