车辆防滑控制方法、车辆防滑控制系统及汽车与流程
本发明涉及车辆控制,尤其涉及一种车辆防滑控制方法、车辆防滑控制系统及汽车。
背景技术:
1、传统的车辆防滑控制方法是通过在车辆稳定控制器中计算目标驾驶员扭矩,再将目标驾驶员扭矩由车辆稳定控制器通过总线发送给电机驱动控制器实际执行,此方法产生的防滑驱动的响应延迟时间在120ms左右。由于响应延迟时间较长,打滑的驱动轮瞬间难以得到及时控制,在防滑驱动控制软件控制过程中,容易产生如下问题:如在低附路面行驶时,驱动轮打滑较大,若立刻踩制动电机,车辆存在抖动现象;在对开坡道或水平路面全油门起步时,轮速在2-5个循环周期后才得以控制,车辆加速度变化较大,车辆有耸动感;在15%以上高度的对开坡道路面行驶时,车辆左右轮速过大,无法在较短时间内控制左右轮速差,存在差减损坏的隐患。因此,如何降低防滑驱动的响应延迟时间,是现阶段车辆车辆防滑控制领域亟待解决的问题。
技术实现思路
1、本发明实施例提供一种车辆防滑控制方法、车辆防滑控制系统及汽车,以解决现有技术中。
2、本发明实施例提供一种车辆防滑控制方法,包括:
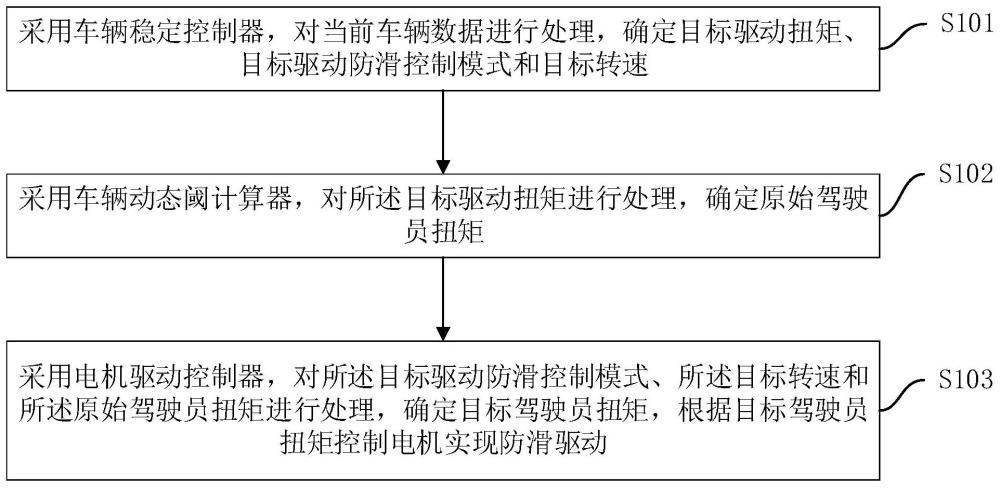
3、采用车辆稳定控制器,对当前车辆数据进行处理,确定目标驱动扭矩、目标车辆防滑控制模式和目标转速;
4、采用车辆动态阈计算器,对所述目标驱动扭矩进行处理,确定原始驾驶员扭矩;
5、采用电机驱动控制器,对所述目标车辆防滑控制模式、所述目标转速和所述原始驾驶员扭矩进行处理,确定目标驾驶员扭矩,根据目标驾驶员扭矩控制电机实现防滑驱动。
6、优选地,所述对当前车辆数据进行处理,确定目标驱动扭矩、目标车辆防滑控制模式和目标转速,包括:
7、获取当前车辆状态;
8、若所述当前车辆状态为打滑状态,则对当前车辆数据进行处理,确定目标驱动扭矩、目标车辆防滑控制模式和目标转速。
9、优选地,所述对所述目标驱动扭矩进行处理,确定原始驾驶员扭矩,包括:
10、获取当前车辆状态;
11、若所述当前车辆状态为打滑状态,则根据所述目标驱动扭矩,确定原始驾驶员扭矩;
12、若所述当前车辆状态不为打滑状态,则根据驾驶员扭矩请求中的外部驱动扭矩,确定原始驾驶员扭矩。
13、优选地,所述对所述目标车辆防滑控制模式、所述目标转速和所述原始驾驶员扭矩进行处理,确定目标驾驶员扭矩,包括:
14、根据所述目标车辆防滑控制模式、所述目标转速和当前转速,计算调整驾驶员扭矩;
15、根据所述调整驾驶员扭矩和所述原始驾驶员扭矩,确定目标驾驶员扭矩。
16、优选地,所述根据所述调整驾驶员扭矩和所述原始驾驶员扭矩,确定目标驾驶员扭矩,包括:
17、将所述调整驾驶员扭矩和所述原始驾驶员扭矩的较小值,确定为第一扭矩;
18、对所述第一扭矩进行滤波处理,确定所述目标驾驶员扭矩。
19、本发明实施例提供一种车辆防滑控制系统,包括车辆稳定控制器、车辆动态阈计算器和电机驱动控制器;
20、所述车辆稳定控制器,用于对当前车辆数据进行处理,确定目标驱动扭矩、目标车辆防滑控制模式和目标转速;
21、所述车辆动态阈计算器,用于对所述目标驱动扭矩进行处理,确定原始驾驶员扭矩;
22、所述电机驱动控制器,用于对所述目标车辆防滑控制模式、所述目标转速和所述原始驾驶员扭矩进行处理,确定目标驾驶员扭矩,根据目标驾驶员扭矩控制电机实现防滑驱动。
23、优选地,所述车辆稳定控制器,用于:
24、获取当前车辆状态;
25、若所述当前车辆状态为打滑状态,则对当前车辆数据进行处理,确定目标驱动扭矩、目标车辆防滑控制模式和目标转速。
26、优选地,所述车辆动态阈计算器,用于:
27、获取当前车辆状态;
28、若所述当前车辆状态为打滑状态,则根据所述目标驱动扭矩,确定原始驾驶员扭矩;
29、若所述当前车辆状态不为打滑状态,则根据驾驶员扭矩请求中的外部驱动扭矩,确定原始驾驶员扭矩。
30、优选地,所述电机驱动控制器,用于:
31、根据所述目标车辆防滑控制模式、所述目标转速和当前转速,计算调整驾驶员扭矩;
32、根据所述调整驾驶员扭矩和所述原始驾驶员扭矩,确定目标驾驶员扭矩。
33、优选地,所述电机驱动控制器,用于:
34、将所述调整驾驶员扭矩和所述原始驾驶员扭矩的较小值,确定为第一扭矩;
35、对所述第一扭矩进行滤波处理,确定所述目标驾驶员扭矩。
36、本发明实施例提供一种汽车,包括上述车辆防滑控制系统。
37、上述车辆防滑控制方法、车辆防滑控制系统及汽车,采用车辆稳定控制器、车辆动态阈计算器和电机驱动控制器来共同实现车辆防滑控制,改变了传统的由车辆稳定控制器生成目标驾驶员扭矩,并由总线将目标驾驶员扭矩发送到电机驱动控制器进行执行的模式,利用电机驱动控制器生成目标驾驶员扭矩,并由目标驾驶员扭矩控制电机实现防滑驱动的方式,极大缩短了扭矩的响应时间,使得整车性能得到很大的提高,提升车辆行驶过程的平稳性。
技术特征:
1.一种车辆防滑控制方法,其特征在于,包括:
2.如权利要求1所述的车辆防滑控制方法,其特征在于,所述对当前车辆数据进行处理,确定目标驱动扭矩、目标车辆防滑控制模式和目标转速,包括:
3.如权利要求1所述的车辆防滑控制方法,其特征在于,所述对所述目标驱动扭矩进行处理,确定原始驾驶员扭矩,包括:
4.如权利要求1所述的车辆防滑控制方法,其特征在于,所述对所述目标车辆防滑控制模式、所述目标转速和所述原始驾驶员扭矩进行处理,确定目标驾驶员扭矩,包括:
5.如权利要求4所述的车辆防滑控制方法,其特征在于,所述根据所述调整驾驶员扭矩和所述原始驾驶员扭矩,确定目标驾驶员扭矩,包括:
6.一种车辆防滑控制系统,其特征在于,包括车辆稳定控制器、车辆动态阈计算器和电机驱动控制器;
7.如权利要求6所述的车辆防滑控制系统,其特征在于,所述车辆稳定控制器,用于:
8.如权利要求6所述的车辆防滑控制系统,其特征在于,所述车辆动态阈计算器,用于:
9.如权利要求6所述的车辆防滑控制系统,其特征在于,所述电机驱动控制器,用于:
10.如权利要求9所述的车辆防滑控制系统,其特征在于,所述电机驱动控制器,用于:
11.一种汽车,其特征在于,包括权利要求6-10任一项所述的车辆防滑控制系统。
技术总结
本发明公开了一种车辆防滑控制方法、车辆防滑控制系统及汽车。该方法包括:采用车辆稳定控制器,对当前车辆数据进行处理,确定目标驱动扭矩、目标车辆防滑控制模式和目标转速;采用车辆动态阈计算器,对所述目标驱动扭矩进行处理,确定原始驾驶员扭矩;采用电机驱动控制器,对所述目标车辆防滑控制模式、所述目标转速和所述原始驾驶员扭矩进行处理,确定目标驾驶员扭矩,根据目标驾驶员扭矩控制电机实现防滑驱动。该方法通过在电机驱动控制器中计算目标驾驶员扭矩,极大缩短扭矩响应时间,使得车辆打滑时能在最短的时间内进行精确控制,提高整车性能。
技术研发人员:顾敦位,刘甚宏,牛喜渊,姬祥,范恒博
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!