自动泊车方法、装置、电子设备、存储介质及车辆与流程
本发明涉及车辆控制,更具体地,涉及一种自动泊车方法、装置、电子设备、存储介质及车辆。
背景技术:
1、在自动泊车过程中,需要调整车辆的方向,让车辆与车位平行,使车辆能够直行至车位内。在现有的自动泊车方法中,通常需要让车辆多次移动才能让车辆与车位平行,车辆移动次数较多,泊车效率低。
技术实现思路
1、本发明的一个目的是提供一种用于自动泊车的新技术方案。
2、根据本发明的第一方面,提供了一种自动泊车方法,所述方法包括:
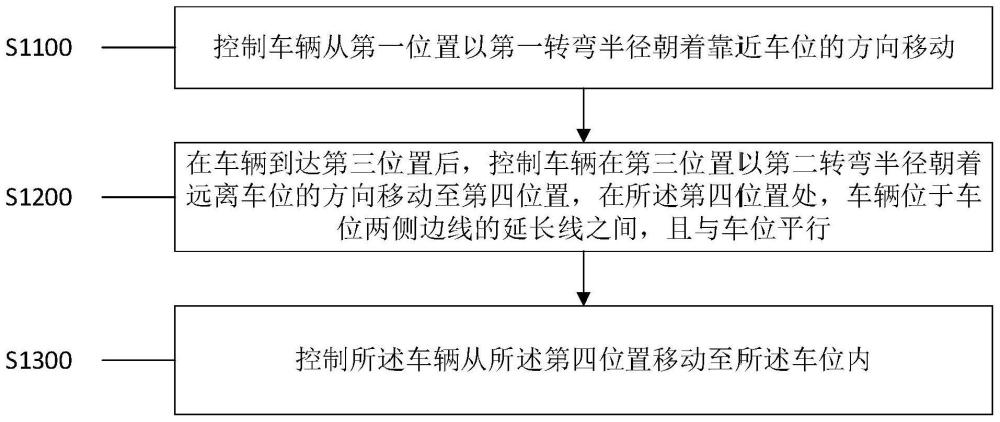
3、控制车辆从第一位置以第一转弯半径朝着靠近车位的方向移动;
4、在车辆到达第三位置后,控制车辆在第三位置以第二转弯半径朝着远离车位的方向移动至第四位置,在所述第四位置处,车辆位于车位两侧边线的延长线之间,且与车位平行;
5、控制所述车辆从所述第四位置移动至所述车位内。
6、可选地,所述控制车辆从第一位置以第一转弯半径朝着靠近车位的方向移动包括:
7、根据第二位置的信息,控制车辆从第一位置以第一转弯半径朝着靠近车位的方向,向所述第二位置移动;
8、所述第三位置是在以所述第一转弯半径朝着靠近车位的方向移动的过程中,超过所述第二位置后到达的位置;
9、所述第二位置满足以下条件:所述车辆从所述第二位置以所述第一转弯半径朝着远离车位的方向移动能够到达第五位置,在所述第五位置处,车辆位于车位两侧边线的延长线之间,且与车位平行。
10、可选地,所述第五位置与所述车位的目标侧边间的距离,等于所述第四位置与所述目标侧边间的距离,所述目标侧边为所述车位的一个侧边。
11、可选地,所述第二转弯半径和所述第四位置是根据约束条件确定的;
12、所述约束条件是根据所述第二转弯半径、所述第三位置的坐标、所述第四位置的坐标、所述车辆在所述第三位置的航向角和所述车辆在所述第四位置的航向角构建的,其中,所述第三位置的坐标、所述第四位置的横坐标、所述车辆在所述第三位置的航向角和所述车辆在所述第四位置的航向角是已知的。
13、可选地,所述约束条件包括:
14、所述第二转弯半径为第一数值与第二数值的比值,所述第一数值为所述第四位置的横坐标与所述第三位置的横坐标的差,所述第二数值为数值一与车辆在所述第三位置处的航向角的正弦值的差;
15、所述第四位置的纵坐标为所述第三位置的纵坐标与第三数值的和,所述第三数值为所述第二转弯半径与所述航向角的余弦值的乘积。
16、可选地,其特征在于,所述第四位置与车位的中心线之间的距离小于阈值。
17、可选地,在所述第四位置处,所述车辆的尾部朝向所述车位的入口。
18、根据本发明的第二方面,提供了一种自动泊车装置,包括:
19、第一控制模块,用于控制车辆从第一位置以第一转弯半径朝着靠近车位的方向移动;
20、第二控制模块,用于在车辆到达第三位置后,控制车辆在第三位置以第二转弯半径朝着远离车位的方向移动至第四位置,在所述第四位置处,车辆位于车位两侧边线的延长线之间,且与车位平行;
21、第三控制模块,用于控制所述车辆从所述第四位置移动至所述车位内。
22、根据本发明的第三方面,提供了一种电子设备,包括处理器和存储器,所述存储器存储可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如本发明第一方面所述的自动泊车方法的步骤。
23、根据本发明的第四方面,提供了一种车辆,包括本发明第二方面所述的自动泊车装置。
24、根据本发明的第五方面,提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如本发明第一方面所述的自动泊车方法的步骤。
25、根据本发明的一个实施例,本发明通过让车辆从第一位置以第一转弯半径朝着靠近车位的方向移动至第三位置,控制车辆从第三位置以第二转弯半径朝着远离车位的方向移动至第四位置,在车辆的移动过程中调整车辆的方向,让车辆在第四位置时与车位平行,使得车辆能够直行至车位内,车辆移动次数少,提高泊车效率。同时在车辆移动过程中,通过改变车辆的转弯半径,能够设计出更多满足泊车要求的路径,使本发明的自动泊车方法能够应用于更多的场景。
26、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
技术特征:
1.一种自动泊车方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述控制车辆从第一位置以第一转弯半径朝着靠近车位的方向移动包括:
3.根据权利要求2所述的方法,其特征在于,所述第五位置与所述车位的目标侧边间的距离,等于所述第四位置与所述目标侧边间的距离,所述目标侧边为所述车位的一个侧边。
4.根据权利要求1至3中任意一项所述的方法,其特征在于,所述第二转弯半径和所述第四位置是根据约束条件确定的;
5.根据权利要求4所述的方法,其特征在于,所述约束条件包括:
6.根据权利要求1至5中任意一项所述的方法,其特征在于,所述第四位置与车位的中心线之间的距离小于阈值。
7.根据权利要求1至6中任意一项所述的方法,其特征在于,在所述第四位置处,所述车辆的尾部朝向所述车位的入口。
8.一种自动泊车装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如权利要求1-7任一项所述的自动泊车方法的步骤。
10.一种车辆,其特征在于,包括权利要求8所述的自动泊车装置。
11.一种可读存储介质,其特征在于,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如权利要求1-7任一项所述的自动泊车方法的步骤。
技术总结
本发明公开了一种自动泊车方法、装置、电子设备、存储介质及车辆。所述方法包括:控制车辆从第一位置以第一转弯半径朝着靠近车位的方向移动;在车辆到达第三位置后,控制车辆在第三位置以第二转弯半径朝着远离车位的方向移动至第四位置,在所述第四位置处,车辆位于车位两侧边线的延长线之间,且与车位平行;控制所述车辆从所述第四位置移动至所述车位内。本发明通过让车辆从第一位置以第一转弯半径朝着靠近车位的方向移动至第三位置,控制车辆从第三位置以第二转弯半径朝着远离车位的方向移动至第四位置,在车辆的移动过程中调整车辆的方向,让车辆在第四位置时与车位平行,使得车辆能够直行至车位内,车辆移动次数少,提高泊车效率。
技术研发人员:熊斌,钟益林,彭邦煌,白军明,杨少远
受保护的技术使用者:比亚迪股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!