一种重卡换电设备及其传感定位方法与流程
本发明属于电动汽车换电领域,特别是涉及一种重卡换电设备及其传感定位方法。
背景技术:
1、重卡电动化是新能源汽车发展的重要组成部分,在节能减排领域具有巨大的潜力。政府相关部门已经看到换电模式在部分应用场景中的特殊优势。电动重卡在排放、驾驶体验、使用成本以及车辆管理等方面具有一定优势。排放方面,电动重卡依托电力驱动,可实现零排放,并且具有电机驱动带来的噪音降低、换挡便利、振动减小等优势;成本方面,电力消耗的成本远远低于柴油车;管理方面,重卡电动化将使得车辆数据更加容易采集及上传分析处理,优化交通领域的能源供给,在某些封闭场景里(如矿山、港口),基于电动化的无人化技术应用,极大的解决了安全事故隐忧。
2、采用换电模式可以有效的弥补部分充电模式的短板,在部分场景中可以有效的促进重卡电动化的发展。但目前对于机器人独立完成电动车电池更换方面的研究较少,且难以准确定位待换电池的位置。
技术实现思路
1、本发明的目的在于提供一种重卡换电设备及其传感定位方法,以解决现有技术中换电设备难以准确定位并自动更换电池的问题。
2、为实现上述目的,本发明的方案包括:
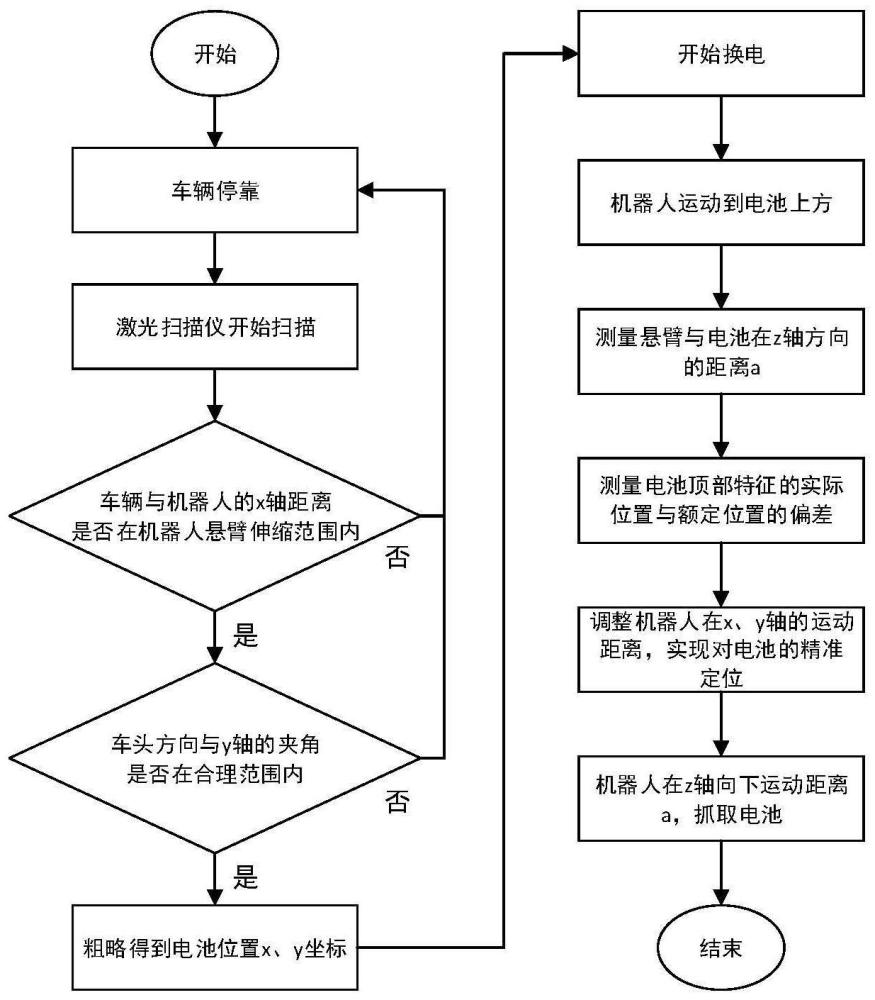
3、本发明的一种基于重卡换电设备的传感定位方法,包括如下步骤:
4、1)通过换电设施上设置的垂直于车身的横向传感器测量车辆相对换电设施的方位,判断车辆上的电池是否位于换电设施上的伸缩悬臂的夹取范围;所述伸缩悬臂用于取、放电池;
5、2)在电池位于所述伸缩悬臂的夹取范围时,伸缩悬臂移动到所述电池的上方;
6、3)通过所述伸缩悬臂上安装的垂向传感器,调整伸缩悬臂到用于夹取电池的额定位置,并测量伸缩悬臂与电池的高度差;
7、4)根据高度差下降伸缩悬臂夹取电池。
8、本发明的有益效果为:通过自动定位换电可以实现重卡换电的无人操作,促进了重卡换电自动化的发展。在5分钟之内完成换电,和传统车加油时间相当,在重卡设备采用换电模式可以有效弥补部分充电模式的短板,在部分场景中可以有效的促进重卡电动化的发展。
9、进一步地,所述车辆相对换电设施的方位包括车辆距换电设施的横向距离,和车辆轴线方向与换电设施的夹角;当车辆距换电设施的横向距离小于伸缩悬臂横向伸出的范围,且车辆轴线方向与换电设施的夹角在设定范围内,则电池位于换电设施上的伸缩悬臂夹取范围。
10、本发明的有益效果为:通过一种传感器,测量车辆与换电机器人的距离,使车辆在换电机器人的工作范围,方面换电机器人的自动化换电。
11、进一步地,至少通过车头和车尾分别与换电设施的横向距离计算车辆轴线方向与换电设施的夹角。
12、本发明的有益效果为:通过一种传感器,测量车辆前后分别与换电机器人的距离,得到车辆与换电设施的夹角,使车辆在换电机器人的正常工作范围,方面换电机器人的自动化换电。
13、进一步地,通过垂向传感器拍摄电池顶部特征点判断伸缩悬臂当前位置与额定位置的偏差,通过所述偏差调整伸缩悬臂到用于夹取电池的额定位置。
14、本发明的有益效果为:当车辆位于换电机器人的工作范围时,需要具体定位电池所在位置,调整伸缩悬臂的位置,方便换电机器人夹取电池。
15、进一步地,所述横向传感器采用激光扫描仪,所述垂向传感器包括相机和测距雷达;所述电池顶部特征点为二维码或者小孔。
16、本发明的有益效果为:采用不同传感器,能够实现方案中对车辆及电池的定位要求,以实现对重卡换电车辆的准确定位,实现对重卡车辆的电池的自动化精准更换。
17、本发明的一种重卡换电设备,包括用于取、放电池的伸缩悬臂和垂直于待换电池车辆车身的用于测量车辆相对换电设施方位的横向传感器以及伸缩悬臂上安装的垂向传感器;通过所述车辆相对换电设施的方位判断车辆上的电池是否位于换电设施上的伸缩悬臂的夹取范围;伸缩悬臂移动到所述电池的上方后,通过所述垂向传感器调整伸缩悬臂到用于夹取电池的额定位置,并测量伸缩悬臂与电池的高度差。
18、进一步地,所述车辆相对换电设施的方位包括车辆距换电设施的横向距离,和车辆轴线方向与换电设施的夹角;当车辆距换电设施的横向距离小于伸缩悬臂横向伸出的范围,且车辆轴线方向与换电设施的夹角在设定范围内,则电池位于换电设施上的伸缩悬臂夹取范围。
19、进一步地,至少通过车头和车尾分别与换电设施的横向距离计算车辆轴线方向与换电设施的夹角。
20、进一步地,所述垂向传感器通过拍摄电池顶部特征点判断伸缩悬臂当前位置与额定位置的偏差,通过所述偏差调整伸缩悬臂到用于夹取电池的额定位置。
21、进一步地,所述横向传感器采用激光扫描仪,所述垂向传感器包括相机和测距雷达。
技术特征:
1.一种基于重卡换电设备的传感定位方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于重卡换电设备的传感定位方法,其特征在于,所述车辆相对换电设施的方位包括车辆距换电设施的横向距离,和车辆轴线方向与换电设施的夹角;当车辆距换电设施的横向距离小于伸缩悬臂横向伸出的范围,且车辆轴线方向与换电设施的夹角在设定范围内,则电池位于换电设施上的伸缩悬臂夹取范围。
3.根据权利要求2所述的基于重卡换电设备的传感定位方法,其特征在于,至少通过车头和车尾分别与换电设施的横向距离计算车辆轴线方向与换电设施的夹角。
4.根据权利要求1所述的基于重卡换电设备的传感定位方法,其特征在于,通过垂向传感器拍摄电池顶部特征点判断伸缩悬臂当前位置与额定位置的偏差,通过所述偏差调整伸缩悬臂到用于夹取电池的额定位置。
5.根据权利要求4所述的基于重卡换电设备的传感定位方法,其特征在于,所述横向传感器采用激光扫描仪,所述垂向传感器包括相机和测距雷达;所述电池顶部特征点为二维码或者小孔。
6.一种重卡换电设备,其特征在于,包括用于取、放电池的伸缩悬臂和垂直于待换电池车辆车身的用于测量车辆相对换电设施方位的横向传感器以及伸缩悬臂上安装的垂向传感器;通过所述车辆相对换电设施的方位判断车辆上的电池是否位于换电设施上的伸缩悬臂的夹取范围;伸缩悬臂移动到所述电池的上方后,通过所述垂向传感器调整伸缩悬臂到用于夹取电池的额定位置,并测量伸缩悬臂与电池的高度差。
7.根据权利要求6所述的重卡换电设备,其特征在于,所述车辆相对换电设施的方位包括车辆距换电设施的横向距离,和车辆轴线方向与换电设施的夹角;当车辆距换电设施的横向距离小于伸缩悬臂横向伸出的范围,且车辆轴线方向与换电设施的夹角在设定范围内,则电池位于换电设施上的伸缩悬臂夹取范围。
8.根据权利要求7所述的重卡换电设备,其特征在于,至少通过车头和车尾分别与换电设施的横向距离计算车辆轴线方向与换电设施的夹角。
9.根据权利要求6所述的重卡换电设备,其特征在于,所述垂向传感器通过拍摄电池顶部特征点判断伸缩悬臂当前位置与额定位置的偏差,通过所述偏差调整伸缩悬臂到用于夹取电池的额定位置。
10.根据权利要求9所述的重卡换电设备,其特征在于,所述横向传感器采用激光扫描仪,所述垂向传感器包括相机和测距雷达。
技术总结
本发明涉及一种重卡换电设备及其传感定位方法,其特征在于,包括如下步骤:1)通过换电设施上设置的垂直于车身的横向传感器测量车辆相对换电设施的方位,判断车辆上的电池是否位于换电设施上的伸缩悬臂的夹取范围;所述伸缩悬臂用于取、放电池;2)在电池位于所述伸缩悬臂的夹取范围时,伸缩悬臂移动到所述电池的上方;3)通过所述伸缩悬臂上安装的垂向传感器,调整伸缩悬臂到用于夹取电池的额定位置,并测量伸缩悬臂与电池的高度差;4)根据高度差下降伸缩悬臂夹取电池。通过自动定位换电可以实现重卡换电的无人操作,促进了重卡换电自动化的发展。
技术研发人员:高培源,张航,牛成玉,张亚浩,曾国辉,陈磊,王兆庆,杨金鑫,赵江信,李燕,王傲坤,王浩,王威,杨晓楠,易甜甜
受保护的技术使用者:许继电气股份有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!