一种无人驾驶汽车防撞方法及其装置
本发明涉及汽车领域,具体为一种无人驾驶汽车防撞方法及其装置。
背景技术:
1、21世纪的社会是信息化社会,人工智能和自动控制渗透到日常生活的方方面面,无人驾驶汽车使用超声波测距仪、激光雷达、传感器等进行正常驾驶,从而避免撞击到前方的障碍区。
2、无人驾驶汽车是通过车载传感系统感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,自动规划行车路线、控制车辆的转向和速度并控制车辆到达预定目的地的智能汽车。
3、现有的无人驾驶汽车需要用户手动打开和关闭车门,存在一些安全隐患,比如有时会因为用户操作不当而导致车门没有被完全关上,或用户在下车时没有注意后方来车就打开车门,不仅如此,现有的无人驾驶汽车防撞能力较差,一旦车体发生碰撞或摩擦,车体受损维修起来比较麻烦,还会对车主造成经济上的损失,降低了实用性。
4、为解决上述问题,经过检索,公告号为cn110154700a的专利公开一种基于5g通信技术的具有防撞功能的无人驾驶汽车,文中提出“包括车体、四个车轮和四扇车门,所述车轮与车体的下方连接,四扇车门两两分布在车体的两侧,所述车门的一端与车体铰接,所述车体内设有控制器,所述车门的另一端设有锁紧机构,所述车体外设有防撞机构,所述控制器内设有天线和plc;”目前存在的无人驾驶车辆的防撞系统在感应到路口有事故发生后,都给出了未进入路口车辆的躲避策略,但对已在路口内部的车辆的躲避策略的研究未有,针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明为了弥补市场空白,提供了一种无人驾驶汽车防撞方法及其装置。
2、本发明的目的在于提供一种无人驾驶汽车防撞方法及其装置,以解决上述背景技术中提出的问题。
3、为实现上述目的,本发明提供如下技术方案:
4、一种无人驾驶汽车防撞方法,其防撞方法包括如下步骤:
5、步骤a.车辆出发前检测车辆的可靠性;对车辆的电子元器件进行定时的维护和检查,避免车辆在行驶的过程中,由于电气元件的问题导致避障系统无法工作的情况发生;
6、步骤b.检查物理防撞装置是否可继续使用,检查前防撞结构、侧防撞结构和后防撞结构的损坏程度,避免车辆带病作业;
7、步骤c.灌装:通过车载传感器系统对道路交通环境进行实时检测;
8、步骤d.车载传感器系统将检测出的障碍物的相关信息传递至无人驾驶车辆的中控,通过避障控制执行系统控制车辆的方向盘控制转向单元对车辆进行转向操作、或者通过刹车单元,对车辆进行减速工作;
9、步骤e.依靠方向盘控制转向单元、刹车单元和控制算法对路口车辆进行避障。
10、一种无人驾驶汽车防撞装置,包括:
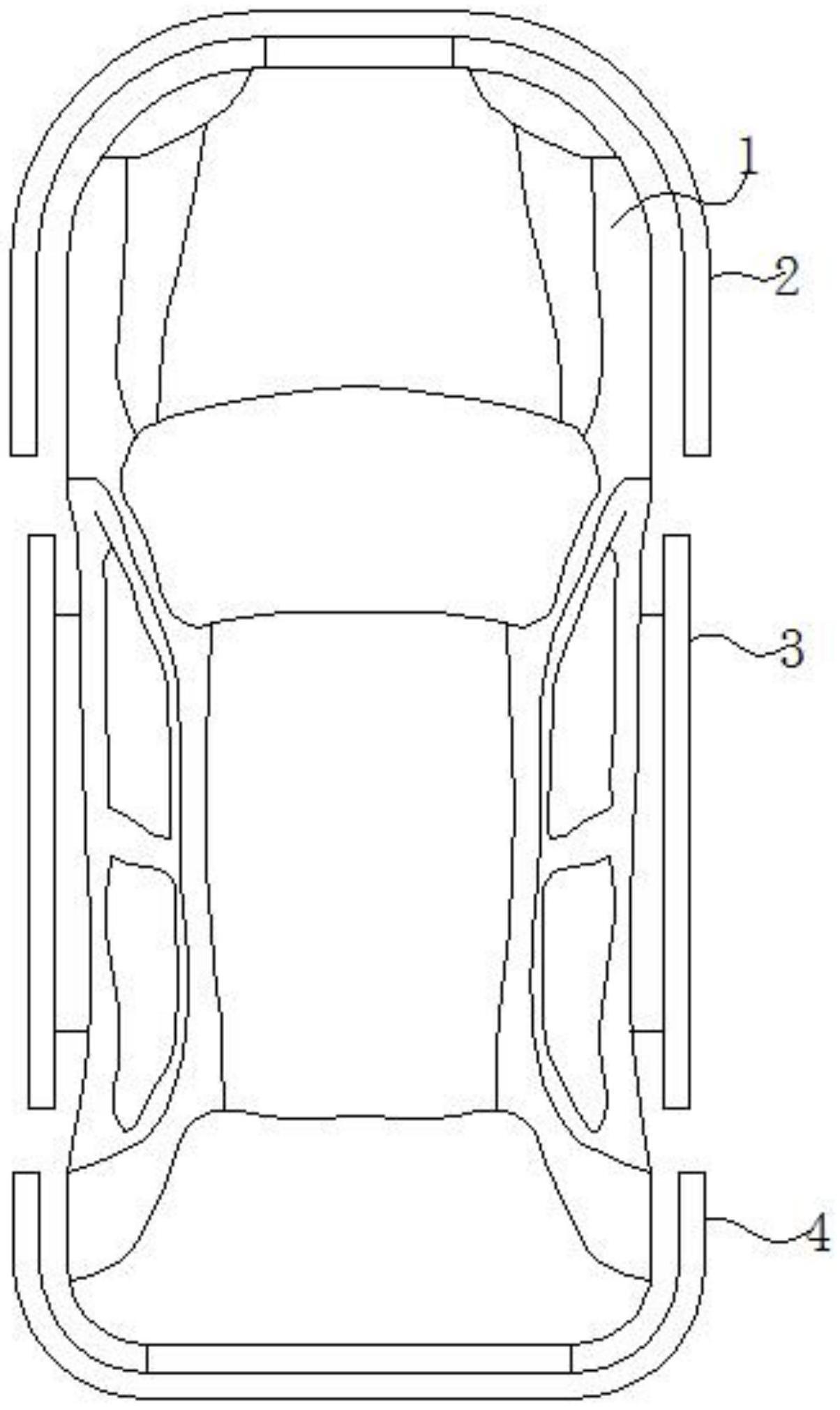
11、无人驾驶车辆,所述无人驾驶车辆的外侧前端固定安装有前防撞结构,且无人驾驶车辆的外侧后端固定安装有后防撞结构,同时无人驾驶车辆的两侧均安装有侧防撞结构,并且无人驾驶车辆内部的车辆避障执行机构是由方向盘控制转向单元和刹车单元,无人驾驶车辆的内部安装有车载传感器系统,且车载传感器系统包括激光传感器、红外传感器和超声波传感器,且激光传感器、红外传感器和超声波传感器分别安装在无人驾驶车辆的车头的保险杠上,路径规划系统与稳定性评估系统电性连接,且路径规划系统通过信息交互融合模块、数据处理模块与车载传感器系统进行数据信息传输。
12、进一步的,所述前防撞结构、后防撞结构是由金属材质做成的“u”形结构,且前防撞结构、后防撞结构和侧防撞结构均通过缓冲连接固定结构固定安装在无人驾驶车辆上。
13、进一步的,所述缓冲连接固定结构包括第一固定框、第二固定框、缓冲块和固定螺栓,且前防撞结构内壁与第一固定框焊接固定,同时第二固定框焊接固定在无人驾驶车辆上。
14、进一步的,所述第一固定框的内部开设有限位槽,且第二固定框的内部开设有限位槽,同时第一固定框和第二固定框上的限位槽中固定夹持有缓冲块,缓冲块是由硬质橡胶材质做成的长方体结构。
15、进一步的,所述第一固定框和缓冲块之间通过两组固定螺栓进行固定,且第二固定框和缓冲块之间通过两组固定螺栓进行固定,侧防撞结构、后防撞结构的安装固定方式与前防撞结构一致。
16、进一步的,所述无人驾驶车辆、车辆避障执行机构、方向盘控制转向单元、刹车单元和稳定性评估系统组合在一起构成避障控制执行系统,且信息交互融合模块和数据处理模块组合在一起构成信息处理系统。
17、进一步的,所述车载传感器系统和车载gps组合在一起构成道路环境感知系统,且道路环境感知系统、避障控制执行系统和信息处理系统组合在一起构成无人驾驶汽车防撞控制系统。
18、进一步的,所述当路口宽度大于4m或为同向多车道路口时,防撞机制不仅可使用依赖安全距离的刹车方式,而且还可以选择更高效的依靠刹车和转弯的防撞机制;通过一组算法说明本文对aim调度策略的改进;首先对车辆的动作进行描述,用微分描述车辆的动作:其中:其中(x,y)是车辆的位置,φ是车辆行驶的方向,l是车辆的轴距,车辆的位置和方向都依赖方向盘的转度ψ和车速v,而车速v的变化则依赖于t时刻的加速度a(t)。
19、通过一种无人驾驶汽车防撞方法对无人驾驶汽车防撞装置进行使用。
20、与现有技术相比,本发明的有益效果是:
21、1.无人驾驶车辆在路面上行驶的时候,可通过自动避障和物理防撞,两种避障方式进行防撞工作,
22、(1)物理避障:在无人驾驶车辆的外侧固定设置有前防撞结构、侧防撞结构、后防撞结构,前防撞结构、侧防撞结构和后防撞结构组合在一起构成无人驾驶车辆的防撞网;
23、(2)道路环境感知系统、避障控制执行系统和信息处理系统组合在一起构成无人驾驶汽车防撞控制系统,激光传感器、红外传感器和超声波传感器可同时对无人驾驶车辆的前进方向进行障碍检测,并通过mcu等一系列控制结构,实现对无人驾驶车辆的自动避障工作;
24、2.无人驾驶汽车防撞控制系统的设置可根据事故发生的时间、监测到故障的时间和给出防撞策略的时间为路口每个车辆单独设计防撞策略,与传统的车辆防撞系统相比,安全性更高,适用性更强。
技术特征:
1.一种无人驾驶汽车防撞方法,其防撞方法包括如下步骤,其特征在于;
2.一种无人驾驶汽车防撞装置,其特征在于,包括:
3.根据权利要求2所述的一种无人驾驶汽车防撞装置,其特征在于:所述前防撞结构(2)、后防撞结构(4)是由金属材质做成的“u”形结构,且前防撞结构(2)、后防撞结构(4)和侧防撞结构(3)均通过缓冲连接固定结构(5)固定安装在无人驾驶车辆(1)上。
4.根据权利要求3所述的一种无人驾驶汽车防撞装置,其特征在于:所述缓冲连接固定结构(5)包括第一固定框(51)、第二固定框(52)、缓冲块(53)和固定螺栓(54),且前防撞结构(2)内壁与第一固定框(51)焊接固定,同时第二固定框(52)焊接固定在无人驾驶车辆(1)上。
5.根据权利要求4所述的一种无人驾驶汽车防撞装置,其特征在于:所述第一固定框(51)的内部开设有限位槽,且第二固定框(52)的内部开设有限位槽,同时第一固定框(51)和第二固定框(52)上的限位槽中固定夹持有缓冲块(53),缓冲块(53)是由硬质橡胶材质做成的长方体结构。
6.根据权利要求5所述的一种无人驾驶汽车防撞装置,其特征在于:所述第一固定框(51)和缓冲块(53)之间通过两组固定螺栓(54)进行固定,且第二固定框(52)和缓冲块(53)之间通过两组固定螺栓(54)进行固定,侧防撞结构(3)、后防撞结构(4)的安装固定方式与前防撞结构(2)一致。
7.根据权利要求2所述的一种无人驾驶汽车防撞装置,其特征在于:所述无人驾驶车辆(1)、车辆避障执行机构(6)、方向盘控制转向单元(7)、刹车单元(8)和稳定性评估系统(9)组合在一起构成避障控制执行系统,且信息交互融合模块(11)和数据处理模块(12)组合在一起构成信息处理系统。
8.根据权利要求2所述的一种无人驾驶汽车防撞装置,其特征在于:所述车载传感器系统(13)和车载gps(16)组合在一起构成道路环境感知系统,且道路环境感知系统、避障控制执行系统和信息处理系统组合在一起构成无人驾驶汽车防撞控制系统。
9.根据权利要求1所述的一种无人驾驶汽车防撞装置,其特征在于:所述当路口宽度大于4m或为同向多车道路口时,防撞机制不仅可使用依赖安全距离的刹车方式,而且还可以选择更高效的依靠刹车和转弯的防撞机制;通过一组算法说明本文对aim调度策略的改进;首先对车辆的动作进行描述,用微分描述车辆的动作:其中:其中(x,y)是车辆的位置,φ是车辆行驶的方向,l是车辆的轴距,车辆的位置和方向都依赖方向盘的转度ψ和车速v,而车速v的变化则依赖于t时刻的加速度a(t)。
10.通过一种无人驾驶汽车防撞方法对无人驾驶汽车防撞装置进行使用。
技术总结
本发明公开了一种无人驾驶汽车防撞方法及其装置,无人驾驶车辆,所述无人驾驶车辆的外侧前端固定安装有前防撞结构,且无人驾驶车辆的外侧后端固定安装有后防撞结构,同时无人驾驶车辆的两侧均安装有侧防撞结构,并且无人驾驶车辆内部的车辆避障执行机构是由方向盘控制转向单元和刹车单元,无人驾驶车辆的内部安装有车载传感器系统,且车载传感器系统包括激光传感器、红外传感器和超声波传感器。该无人驾驶汽车防撞方法及其装置,无人驾驶汽车防撞控制系统的设置可根据事故发生的时间、监测到故障的时间和给出防撞策略的时间为路口每个车辆单独设计防撞策略,与传统的车辆防撞系统相比,安全性更高,适用性更强。
技术研发人员:苏建欢,陈梦吉,陆正杰,韦庆进,宋华宁,邹清平
受保护的技术使用者:河池学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!