车辆转弯控制方法、装置、重卡及存储介质与流程
本发明涉及自动驾驶,尤其涉及车辆转弯控制方法、装置、重卡及存储介质。
背景技术:
1、随着自动驾驶技术的不断发展,自动驾驶技术被广泛应用在不同的车辆上,例如,重型卡车,自动驾驶控制策略是依赖于选取车身上一点进行控制,然后根据该点选取参考轨迹上的某一点作为参考点,然后根据控制点和参考点之间的状态误差、参考点对应的路径曲率带来的前馈补偿等进行控制,而重型卡车具有车身长的特点,即使控制点与参考点始终保持较小误差,也难以保证整个车身都在一个合理的行驶区域内,尤其是在大曲率路段下,且在实际控制过程中,控制存在滞后、超调等影响,使得车辆的转弯内侧空间和转弯外侧空间无法得到平衡,造成车辆转弯不合理及准确性较低。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种车辆转弯控制方法、装置、重卡及存储介质,旨在解决现有技术无法平衡车辆的转弯内侧空间和转弯外侧空间,造成车辆转弯不合理及准确性较低的技术问题。
2、为实现上述目的,本发明提供了一种车辆转弯控制方法,所述车辆转弯控制方法包括以下步骤:
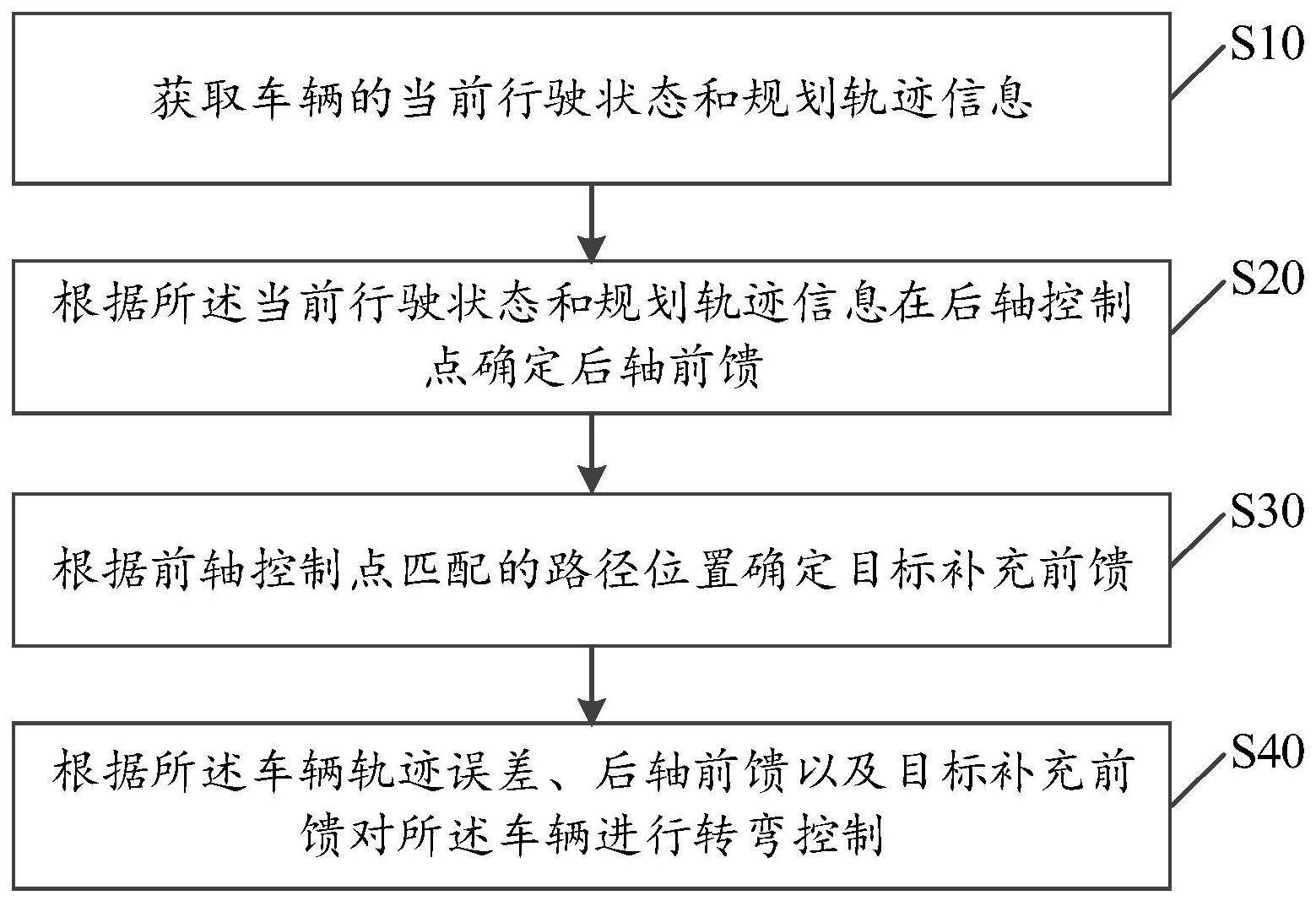
3、获取车辆的当前行驶状态和规划轨迹信息;
4、根据所述当前行驶状态和规划轨迹信息在后轴控制点确定后轴前馈;
5、根据前轴控制点匹配的路径位置确定目标补充前馈;
6、根据所述后轴前馈以及目标补充前馈对所述车辆进行转弯控制。
7、可选地,所述根据所述当前行驶状态和规划轨迹信息在后轴控制点确定后轴前馈,包括:
8、在车辆的后轴上选取第一目标点作为后轴控制点;
9、根据所述当前行驶状态确定当前行驶轨迹,以及根据所述规划轨迹信息确定规划轨迹;
10、通过后轴误差模型根据所述当前行驶轨迹和规划轨迹确定车辆轨迹横向误差参数和车辆轨迹航向误差参数;
11、根据所述车辆轨迹横向误差参数和车辆轨迹航向误差参数在所述后轴控制点确定后轴前馈。
12、可选地,所述根据所述车辆轨迹横向误差参数和车辆轨迹航向误差参数在所述后轴控制点确定后轴前馈,包括:
13、根据所述车辆轨迹横向误差参数和车辆轨迹航向误差参数构建车辆运动lqr;
14、根据所述车辆运动lqr确定lqr总增益;
15、获取前后轮胎侧偏刚度、前后轮与质心的距离、轴距、路径参考点曲率以及车辆参数;
16、通过目标后轴前馈算法根据所述lqr总增益、前后轮胎侧偏刚度、前后轮与质心的距离、轴距、路径参考点曲率以及车辆参数在后轴控制点计算后轴前馈。
17、可选地,所述根据前轴控制点匹配的路径位置确定目标补充前馈,包括:
18、在车辆的前轴上选取第二目标点作为前轴控制点;
19、将当前行驶轨迹和规划轨迹进行匹配,得到当前轨迹匹配结果;
20、根据所述当前轨迹匹配结果确定在所述前轴控制点的路径位置;
21、根据所述前轴控制点的路径位置确定目标补充前馈。
22、可选地,所述根据所述前轴控制点的路径位置确定目标补充前馈,包括:
23、根据车辆参数得到车辆质量和车辆前进速度;
24、根据路径参考点曲率得到相对应的曲率倒数;
25、通过目标前轴前馈算法根据所述车辆质量、车辆前进速度、曲率倒数以及lqr总增益、前后轮胎侧偏刚度、前后轮与质心的距离、轴距计算目标补充前馈。
26、可选地,所述根据所述后轴前馈以及目标补充前馈对所述车辆进行转弯控制,包括:
27、获取预设后轴权重和预设前轴权重;
28、根据所述预设后轴权重和后轴前馈计算后轴实际前馈;
29、根据所述预设前轴权重和目标补充前馈计算前轴实际补充前馈;
30、根据lqr总增益、车辆轨迹横向误差参数以及车辆轨迹航向误差参数计算误差前馈参数;
31、根据所述后轴实际前馈、前轴实际补充前馈以及误差前馈参数确定车辆转弯参数;
32、根据所述车辆转弯参数对所述车辆进行转弯控制。
33、可选地,所述根据所述后轴前馈以及目标补充前馈对所述车辆进行转弯控制之后,还包括:
34、获取所述车辆经过控制后的转弯内侧空间和转弯外侧空间;
35、计算所述转弯内侧空间和转弯外侧空间之间的误差;
36、在所述转弯内侧空间和转弯外侧空间之间的误差小于转弯空间误差阈值且所述车辆进入其他弯道时,按照上述方式再次对所述车辆进行转弯控制。
37、此外,为实现上述目的,本发明还提出一种车辆转弯控制装置,所述车辆转弯控制装置包括:
38、获取模块,用于获取车辆的当前行驶状态和规划轨迹信息;
39、确定模块,用于根据所述当前行驶状态和规划轨迹信息在后轴控制点确定车辆轨迹误差和后轴前馈;
40、所述确定模块,还用于根据前轴控制点匹配的路径位置确定目标补充前馈;
41、控制模块,用于根据所述车辆轨迹误差、后轴前馈以及目标补充前馈对所述车辆进行转弯控制。
42、此外,为实现上述目的,本发明还提出一种重卡,所述重卡包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆转弯控制程序,所述车辆转弯控制程序配置为实现如上文所述的车辆转弯控制方法。
43、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有车辆转弯控制程序,所述车辆转弯控制程序被处理器执行时实现如上文所述的车辆转弯控制方法。
44、本发明提出的车辆转弯控制方法,通过获取车辆的当前行驶状态和规划轨迹信息;根据所述当前行驶状态和规划轨迹信息在后轴控制点确定后轴前馈;根据前轴控制点匹配的路径位置确定目标补充前馈;根据所述后轴前馈以及目标补充前馈对所述车辆进行转弯控制;通过上述方式,根据车辆的当前行驶状态和规划轨迹信息确定后轴前馈,以及根据前轴控制点匹配的路径位置确定目标补充前馈,然后在转弯时,通过后轴前馈以及目标补充前馈控制车辆,以平衡车辆的转弯内侧空间和转弯外侧空间,从而能够有效提高车辆转弯的合理性和准确性。
技术特征:
1.一种车辆转弯控制方法,其特征在于,所述车辆转弯控制方法包括以下步骤:
2.如权利要求1所述的车辆转弯控制方法,其特征在于,所述根据所述当前行驶状态和规划轨迹信息在后轴控制点确定后轴前馈,包括:
3.如权利要求2所述的车辆转弯控制方法,其特征在于,所述根据所述车辆轨迹横向误差参数和车辆轨迹航向误差参数在所述后轴控制点确定后轴前馈,包括:
4.如权利要求1所述的车辆转弯控制方法,其特征在于,所述根据前轴控制点匹配的路径位置确定目标补充前馈,包括:
5.如权利要求4所述的车辆转弯控制方法,其特征在于,所述根据所述前轴控制点的路径位置确定目标补充前馈,包括:
6.如权利要求1所述的车辆转弯控制方法,其特征在于,所述根据所述后轴前馈以及目标补充前馈对所述车辆进行转弯控制,包括:
7.如权利要求1至6中任一项所述的车辆转弯控制方法,其特征在于,所述根据所述后轴前馈以及目标补充前馈对所述车辆进行转弯控制之后,还包括:
8.一种车辆转弯控制装置,其特征在于,所述车辆转弯控制装置包括:
9.一种重卡,其特征在于,所述重卡包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆转弯控制程序,所述车辆转弯控制程序配置有实现如权利要求1至7中任一项所述的车辆转弯控制方法。
10.一种存储介质,其特征在于,所述存储介质上存储有车辆转弯控制程序,所述车辆转弯控制程序被处理器执行时实现如权利要求1至7中任一项所述的车辆转弯控制方法。
技术总结
本发明涉及自动驾驶技术领域,公开了一种车辆转弯控制方法、装置、重卡及存储介质,所述方法包括:获取车辆的当前行驶状态和规划轨迹信息;根据所述当前行驶状态和规划轨迹信息在后轴控制点确定后轴前馈;根据前轴控制点匹配的路径位置确定目标补充前馈;根据所述后轴前馈以及目标补充前馈对所述车辆进行转弯控制;通过上述方式,根据车辆的当前行驶状态和规划轨迹信息确定后轴前馈,以及根据前轴控制点匹配的路径位置确定目标补充前馈,然后在转弯时,通过后轴前馈以及目标补充前馈控制车辆,以平衡车辆的转弯内侧空间和转弯外侧空间,从而能够有效提高车辆转弯的合理性和准确性。
技术研发人员:宋日昆,韦红庆,韦嘉宾,李超,宋萍
受保护的技术使用者:东风柳州汽车有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!