自动驾驶车辆的能量回收方法、装置及系统与流程
本发明涉及车辆,尤其涉及一种自动驾驶车辆的能量回收方法、装置、电子设备和计算机存储介质。
背景技术:
1、相关技术中,自动驾驶车辆对于车速的控制,通常根据摄像头等视觉设备提取当前道路限速标志,以及结合地图导航数据提示当前道路限速,并结合前方车辆等情况控制车辆速度,但是当出现天气、道路情况、环境等因素时,有时车辆车速还是较快,减速时机滞后,要求从较高车速开始快速刹车,且刹车距离短,基本通过机械刹车实现,能量回收少,车辆的行驶耗能较大。因此如何更好地实现自动驾驶车辆的能量回收成为亟待解决的问题。
技术实现思路
1、本发明的目的旨在至少在一定程度上解决上述的技术问题之一。
2、为此,本发明的第一个目的在于提出一种自动驾驶车辆的能量回收方法,该方法通过算力分析,提前进入减速,增加允许的刹车距离,加大制动过程中能量回收的参与度,增加储能,降低车辆的行驶耗能。
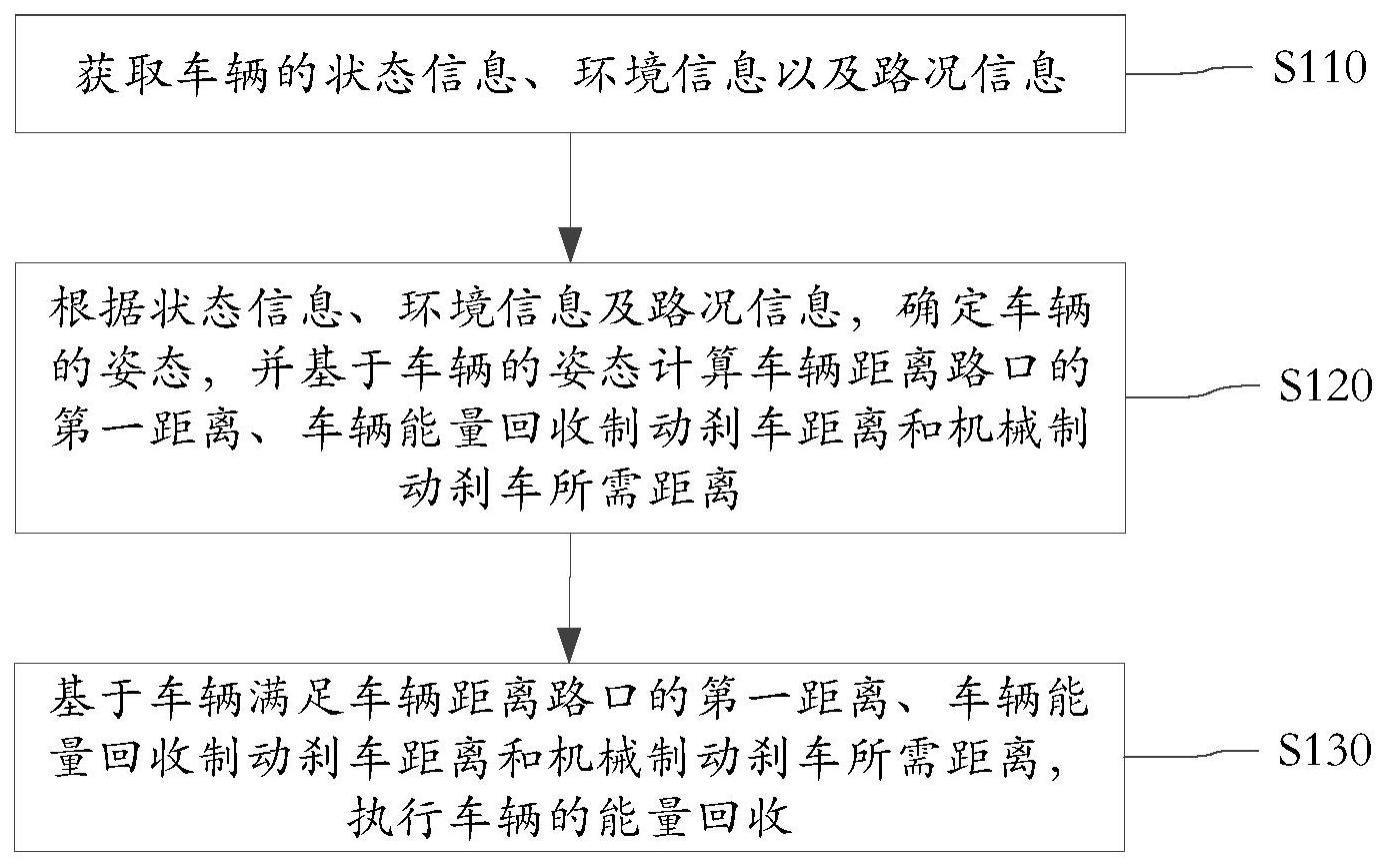
3、为达到上述目的,本发明第一方面实施例提出的自动驾驶车辆的能量回收方法,所述方法包括:获取车辆的状态信息、环境信息以及路况信息;根据所述状态信息、环境信息及所述路况信息,确定所述车辆的姿态,并基于所述车辆的姿态计算所述车辆距离路口的第一距离、车辆能量回收制动刹车距离和机械制动刹车所需距离;基于所述车辆满足所述车辆距离路口的第一距离、所述车辆能量回收制动刹车距离和所述机械制动刹车所需距离,执行所述车辆的能量回收。
4、根据本发明实施例的自动驾驶车辆的能量回收方法,通过获取车辆的状态信息、环境信息以及路况信息,根据状态信息、环境信息及路况信息,确定车辆的姿态,并基于车辆的姿态计算车辆距离路口的第一距离、车辆能量回收制动刹车距离和机械制动刹车所需距离,基于车辆满足车辆距离路口的第一距离、车辆能量回收制动刹车距离和机械制动刹车所需距离,执行车辆的能量回收。该方法通过算力分析,提前进入减速,增加允许的刹车距离,加大制动过程中能量回收的参与度,增加储能,降低车辆的行驶耗能。
5、根据本发明的一个实施例,所述状态信息包括车辆转向信息、转矩信息、制动信息、车速信息以及电池状态中的一种或多种;所述环境信息包括前方车辆信息、相邻车道车辆信息以及障碍物信息中的一种或多种。
6、根据本发明的一个实施例,所述路况信息包括路口信息、交通信息以及道路信息中的一种或多种;所述车辆的姿态包括车辆正常行驶、车辆自适应巡航中、主动紧急制动避障、车辆车道偏离、即将经过路口、车辆处于停车状态以及车辆准备自动泊车入位中的一种。
7、根据本发明的一个实施例,根据所述状态信息、所述环境信息及所述路况信息,基于第一计算模型计算车辆能量回收制动刹车距离,其中,将所述车速信息、路面系数和目标制动扭矩输入至所述第一计算模型,以输出第一刹车距离,根据所述第一刹车距离和第一预设安全距离,计算所述车辆能量回收制动刹车距离。
8、根据本发明的一个实施例,所述目标制动扭矩根据所述车辆的车速和所述车辆的充电功率获得。
9、根据本发明的一个实施例,根据所述状态信息、所述环境信息及所述路况信息,基于第二计算模型计算机械制动刹车所需距离,其中,将所述车速信息、路面系数输入至所述第二计算模型,以输出制动压力及对应的第二刹车距离,根据所述第二刹车距离和第二预设安全距离,计算所述机械制动刹车所需距离。
10、根据本发明的一个实施例,基于所述车辆满足所述车辆距离路口的第一距离、所述车辆能量回收制动刹车距离和所述机械制动刹车所需距离,执行所述车辆的能量回收,包括:判断所述第一距离是否大于所述所述车辆能量回收制动刹车距离;若是,则不执行所述车辆的能量回收;若否,且确定所述第一距离大于所述机械制动刹车所需距离时,控制所述车辆减速至目标车速,以执行所述车辆的能量回收,同时实时获取所述第一距离、所述车辆能量回收制动刹车距离和所述机械制动刹车所需距离,以控制所述车辆车速。
11、根据本发明的一个实施例,确定所述第一距离不大于所述机械制动刹车所需距离时,则启动机械制动刹车或减速停车。
12、为达到上述目的,本发明第二方面实施例提出的自动驾驶车辆的能量回收装置,所述装置包括:获取模块,用于获取车辆的状态信息、环境信息以及路况信息;计算模块,用于根据所述状态信息、环境信息及所述路况信息,确定所述车辆的姿态,并基于所述车辆的姿态计算所述车辆距离路口的第一距离、车辆能量回收制动刹车距离和机械制动刹车所需距离;执行模块,用于基于所述车辆满足所述车辆距离路口的第一距离、所述车辆能量回收制动刹车距离和所述机械制动刹车所需距离,执行所述车辆的能量回收。
13、为达到上述目的,本发明第三方面实施例提出的自动驾驶车辆的能量回收系统,所述系统包括:整车控制模块、自动驾驶控制模块,其中,所述整车控制模块用于将车辆信息上报至所述自动驾驶控制模块,同时接收所述自动驾驶控制模块的控制指令,并将所述控制指令下发至一个或多个子控制单元,所述子控制单元用于控制所述车辆的能量回收。
14、为达到上述目的,本发明第四方面实施例提出的电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现本发明第一方面实施例所述的自动驾驶车辆的能量回收方法。
15、为达到上述目的,本发明第五方面实施例提出的计算机可读存储介质,所述计算机程序被处理器执行时实现本发明第一方面实施例所述的自动驾驶车辆的能量回收方法。
16、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种自动驾驶车辆的能量回收方法,其特征在于,所述方法包括:
2.根据权利要求1所述的自动驾驶车辆的能量回收方法,其特征在于,所述状态信息包括车辆转向信息、转矩信息、制动信息、车速信息以及电池状态中的一种或多种;所述环境信息包括前方车辆信息、相邻车道车辆信息以及障碍物信息中的一种或多种。
3.根据权利要求1所述的自动驾驶车辆的能量回收方法,其特征在于,所述路况信息包括路口信息、交通信息以及道路信息中的一种或多种;所述车辆的姿态包括车辆正常行驶、车辆自适应巡航中、主动紧急制动避障、车辆车道偏离、即将经过路口、车辆处于停车状态以及车辆准备自动泊车入位中的一种。
4.根据权利要求1-3所述的自动驾驶车辆的能量回收方法,其特征在于,根据所述状态信息、所述环境信息及所述路况信息,基于第一计算模型计算车辆能量回收制动刹车距离,其中,将所述车速信息、路面系数和目标制动扭矩输入至所述第一计算模型,以输出第一刹车距离,根据所述第一刹车距离和第一预设安全距离,计算所述车辆能量回收制动刹车距离。
5.根据权利要求4所述的自动驾驶车辆的能量回收方法,其特征在于,所述目标制动扭矩根据所述车辆的车速和所述车辆的充电功率获得。
6.根据权利要求1-3所述的自动驾驶车辆的能量回收方法,其特征在于,根据所述状态信息、所述环境信息及所述路况信息,基于第二计算模型计算机械制动刹车所需距离,其中,将所述车速信息、路面系数输入至所述第二计算模型,以输出制动压力及对应的第二刹车距离,根据所述第二刹车距离和第二预设安全距离,计算所述机械制动刹车所需距离。
7.根据权利要求1所述的自动驾驶车辆的能量回收方法,其特征在于,基于所述车辆满足所述车辆距离路口的第一距离、所述车辆能量回收制动刹车距离和所述机械制动刹车所需距离,执行所述车辆的能量回收,包括:
8.根据权利要求7所述的自动驾驶车辆的能量回收方法,其特征在于,确定所述第一距离不大于所述机械制动刹车所需距离时,则启动机械制动刹车或减速停车。
9.一种自动驾驶车辆的能量回收装置,其特征在于,所述装置包括:
10.一种自动驾驶车辆的能量回收系统,其特征在于,所述系统包括:整车控制模块、自动驾驶控制模块,其中,所述整车控制模块用于将车辆信息上报至所述自动驾驶控制模块,同时接收所述自动驾驶控制模块的控制指令,并将所述控制指令下发至一个或多个子控制单元,所述子控制单元用于控制所述车辆的能量回收。
11.一种电子设备,包括:
12.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-8中任一项所述的自动驾驶车辆的能量回收方法。
技术总结
本发明公开了一种自动驾驶车辆的能量回收方法、装置及系统。该方法包括获取车辆的状态信息、环境信息以及路况信息;根据状态信息、环境信息及路况信息,确定车辆的姿态,并基于车辆的姿态计算车辆距离路口的第一距离、车辆能量回收制动刹车距离和机械制动刹车所需距离;基于车辆满足车辆距离路口的第一距离、车辆能量回收制动刹车距离和机械制动刹车所需距离,执行车辆的能量回收。该方法通过算力分析,提前进入减速,增加允许的刹车距离,加大制动过程中能量回收的参与度,增加储能,降低车辆的行驶耗能。
技术研发人员:王锦霞,李雷,于海龙,姚要攀
受保护的技术使用者:河南德力新能源汽车有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!