前灯控制系统及其控制方法与流程
以下公开涉及前照灯控制系统,更具体地,涉及用于控制安装在车辆前侧的光源的前灯控制系统及其控制方法。
背景技术:
1、根据相关技术的车辆配备有夜间驾驶安全系统,例如智能头灯发射元件、自适应远光灯(adaptive driving beam,adb)系统或远光灯辅助(high beam assistance,hba)系统,增强车辆的能见度,同时显著减少眩光对他人的伤害。这种远光灯系统的开发也存在一个问题,即由于对野生动物的过度眩光,道路上出现的野生动物和撞死的动物迅速增加。
2、更具体地,在当前的智能头光元件,尤其是adb系统的情况下,在跟随前车的情况下,中心处的最大光量可能会丢失。结果,总光量可能减少,并且当野生动物出现在弯曲道路的路肩等处时,驾驶员可能难以识别野生动物。因此,出现了对通过基于车辆驾驶信息和诸如道路曲率的环境信息来控制头光元件或远光灯以向驾驶员提供最佳能见度来消除潜在安全威胁的技术的需求。
3、因此,作为相关技术中应用于近光灯的技术的动态弯道灯(dynamic bendinglight,dbl)通过连接到转向装置来旋转光束模式来辅助提高弯曲道路上的能见度。然而,dbl也是一项不完整的技术,因为当驾驶员实际进入弯道并控制转向装置时,模式会旋转,导致没有足够的时间提前识别野生动物并采取措施。
4、此外,在远光灯的情况下,由于有去除致动器的趋势,难以应用通用的控制机构,因此没有相应的解决方案。特别是在adb系统的情况下,在跟随前车时,由于对应于最大光量的中央部分经常没有光照,所以存在远光灯的效率显著降低的问题。
技术实现思路
1、本发明的实施例旨在提供一种前灯控制系统及其控制方法,其高度适用于现有车辆,并且能够通过基于除了方向盘的转向角之外的导航信息和摄像机信息的组合来调节前灯的光量来有效地控制前灯的光。
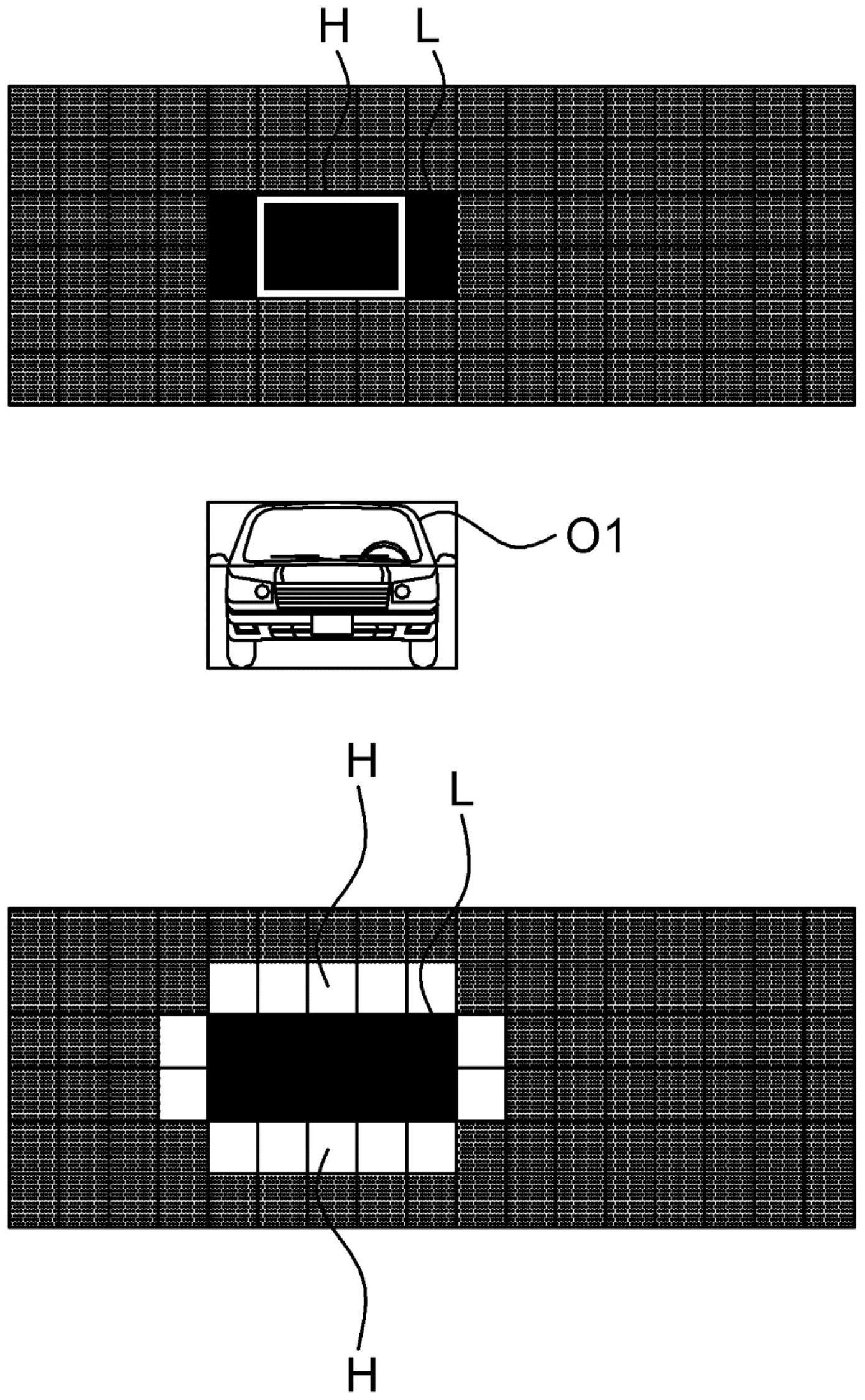
2、本发明的另一个实施例旨在提供一种前灯控制系统及其控制方法,该系统能够通过在有前车的情况下计算熄灭区(light-off section),并且在高亮度区域的变化位置与熄灭区重叠的情况下,增加中心亮度区域在水平方向上或垂直方向上的范围以保持高亮度区域,从而提高驾驶员前方区域的能见度。
3、本发明的另一个实施例旨在提供一种前灯控制系统及其控制方法,该系统通过与已经安装在车辆中的传感器的交互来控制,能够在不增加部件数量和增加成本的情况下容易地实现。
4、在一个一般方面,一种前灯控制系统包括:光源单元,设置在移动装置或移动体的前侧,并且包括两个或更多个发光元件;控制单元,用于基于接收到的环境信息改变预定光照射区域内高亮度区域的相对位置或范围的方式控制光源单元,其中,环境信息包括移动装置的转向角信息,还包括移动装置所在路面的路面信息或道路导航信息中的至少一种。
5、控制单元可以控制光源单元,使得在两个或更多个发光元件中,来自照射高亮度区域的发光元件的光强度高于来自其他发光元件的光强度。
6、光源单元还可包括方向调节致动器,其调节发光元件的光照射方向,并且控制单元可控制方向调节致动器,以使得高亮度区域的亮度高于除高亮度区域之外的区域的亮度。
7、控制单元可根据移动装置的转向角信息计算预期移动路线,基于路面信息图像信息或道路导航信息中的至少一个计算道路曲率,并且,在预期移动路线的曲率大于道路曲率的情况下,高亮度区域在移动装置的转向方向上的位置与实时转向角变化量成比例地改变。
8、控制单元可根据移动装置的转向角信息计算预期移动路线,基于路面信息或道路导航信息中的至少一个计算道路曲率,进一步地,在期望移动路线的曲率等于或小于道路曲率的情况下,与道路的实时曲率成比例地调节高亮度区域的位置。
9、控制单元可依次设置道路曲率的第1至第n参考值,将第1至第n参考值与道路曲率进行比较,并分阶段调节高亮度区域的位置,n为自然数。
10、环境信息可以包括关于移动装置前面的物体的信息,并且在移动装置前面存在一个或多个物体的情况下,控制单元可以将光源单元的光照射区域中物体所在的区域指定为低亮度区域,并且以低亮度区域的亮度等于或低于预定值的方式控制光源单元。
11、在低亮度区域和高亮度区域至少部分地彼此重叠的情况下,控制单元可以控制以对应于低亮度区域的光量照射低亮度区域和高亮度区域彼此重叠的部分,将高亮度区域的相对位置或范围扩展或改变到低亮度区域之外。
12、在低亮度区域和高亮度区域至少部分地彼此重叠的情况下,控制单元可以控制以对应于低亮度区域的光量照射低亮度区域和高亮度区域彼此重叠的部分,以及将高亮度区域相对于低亮度区域在垂直方向或水平方向中的至少一个方向上的相对位置或范围扩展或改变到低亮度区域之外。
13、在另一个一般方面,前灯控制系统的控制方法包括:步骤(a)由控制单元接收环境信息,包括移动装置的转向角信息,并且还包括移动装置所在路面的路面信息或道路导航信息中的至少一个;步骤(b)由控制单元根据接收到的环境信息计算道路曲率;步骤(c),由控制单元根据环境信息设置或调节高亮度区域。
14、步骤(c)可以包括步骤(c1),通过控制单元调节高亮度区域的位置,使得在移动装置的预期路线的曲率大于道路曲率的情况下,高亮度区域移动的距离与移动装置的转向方向上的实时转向角变化量成比例。
15、在步骤(c)中,在移动装置的预期路线的曲率等于或小于道路曲率的情况下,控制单元可以设置道路曲率的第1至第n参考值,并且步骤(c)可包括:步骤(c2),在道路曲率小于第一参考值的情况下保持高亮度区域的位置,n为自然数;步骤(c3),由控制单元调节高亮度区域的位置,使得在道路曲率小于第i参考值的情况下,高亮度区域的位置移动第i-1参考值对应的预定距离,i为正整数,且1<i≤n。
16、环境信息可以包括关于移动装置前方物体的信息,并且控制方法还可以包括:在步骤(c)之后,在移动装置前方存在一个或多个物体的情况下,步骤(d)由控制单元计算光源单元的光照射区域中物体所在的区域作为低亮度区域;步骤(e)由控制单元通过调节低亮度区域和高亮度区域来设置最终的光模式。
17、步骤(d)可以包括:步骤(d1),将在步骤(c)中调节后的高亮度区域的位置暂存;步骤(d2)接收并存储物体的位置信息;步骤(d3)将物体的位置信息与光源单元的光照射区域进行比较以确定低亮度区域,并且在高亮度区域和低亮度区域至少部分重叠的情况下,步骤(d)还可以包括步骤(d4),将高亮度区域相对于低亮度区域在垂直方向或水平方向中的至少一个方向上进行扩展。
技术特征:
1.一种用于控制移动装置的前照灯的系统,包括:
2.根据权利要求1所述的系统,其中:
3.根据权利要求1所述的系统,其中:
4.根据权利要求1所述的系统,其中,所述控制单元被配置为:
5.根据权利要求1所述的系统,其中,所述控制单元被配置为:
6.根据权利要求5所述的系统,其中,所述控制单元被配置为:
7.根据权利要求1所述的系统,其中:
8.根据权利要求7所述的系统,其中,响应于所述低亮度区域和所述高亮度区域彼此至少部分重叠形成重叠部分,所述控制单元被配置为:
9.根据权利要求8所述的系统,其中,为了扩展或改变所述高亮度区域在所述低亮度区域以外的所述相对位置或范围,所述控制单元被配置为以相对于所述低亮度区域,在垂直和水平方向中的至少一个方向上扩展或改变所述高亮度区域的所述相对位置或范围。
10.一种操作具有用于移动装置的光源单元的前灯控制系统的方法,包括:
11.根据权利要求10所述的控制方法,其中,设置或调节所述高亮度区域包括:响应于所述移动装置的预期路线的曲率大于所述道路曲率,在所述移动装置的转向方向上调节所述高亮度区域的位置,所述调节的距离与转向角变化成比例。
12.根据权利要求10所述的控制方法,其中,设置或调节所述高亮度区域包括:
13.根据权利要求10所述的控制方法,其中:
14.根据权利要求13所述的控制方法,其中,将所述光源单元的所述光照射区域内所述物体所在的所述区域指定为所述低亮度区域包括:
技术总结
本发明涉及前照灯控制系统。根据本发明的前灯控制系统及其控制方法高度适用于现有车辆,并且除了方向盘的转向角之外,还能够通过基于导航信息和摄像机信息的组合来调节前灯的光量,从而有效地控制前灯的光,并且可以在有前车的情况下计算熄灭区,并且在高亮度区域的变化位置与熄灭区重叠的情况下,增加中心亮度区域在水平方向上或垂直方向上的范围以保持高亮度区域,从而提高驾驶员前方区域的能见度。
技术研发人员:成埈永
受保护的技术使用者:现代摩比斯株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!