一种电动客车防溜坡和起步控制方法及系统与流程
本公开涉及电动电机控制,具体涉及一种电动客车防溜坡和起步控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术信息,不必然构成在先技术。
2、随着电动客车日益普及,人们对其安全性和操作舒适度的要求越来越高,其中在坡上防溜坡及在起步中如何平稳起步是重点关注的项目。车辆防溜坡功能作为一项辅助功能,最早是应用在传统的车型上,是一种通过机械制动系统参与实现的功能,而这些功能是大量增加汽车的成本。
3、对于电动客车来说,客车所采用的电机为大扭矩电机,可以承受一定的堵转成本,对于电动客车来说,一般电机防溜坡控制方法实现效果较弱,甚至在松动制动踏板后无法及时防溜坡导致车辆长距离后溜或踩油门起步时反应慢,严重影响驾驶安全性及舒适性。
4、现有的对电动汽车的防溜坡控制方法中,大多采用电机控制器输出一个防溜坡力矩完成对防溜坡的控制,但是这种方式无法精准控制防溜坡力矩;且无法与整车状态结合起来,在轻度踩制动踏板但车辆仍后溜的状态下无法实现防溜坡功能,对车辆安全性有一定影响。或者一般对在车辆的控制中,额外的增加硬件进行外在的控制,这无非增加了电动客车的成本,不利于电动客车的经济运行。
技术实现思路
1、本公开为了解决上述问题,提出了一种电动客车防溜坡和起步控制方法及系统,在电动客车基本动力硬件以及原理的基础上,将整车控制器与电机控制器相结合实现及时且持续控制动力传动系统输出扭矩与后溜扭矩平衡,实现坡上快速防溜坡和快速起步操作,增强安全性和提高操作舒适度。
2、根据一些实施例,本公开采用如下技术方案:
3、一种电动客车防溜坡和起步控制系统,包括:
4、整车控制器及电机控制器;
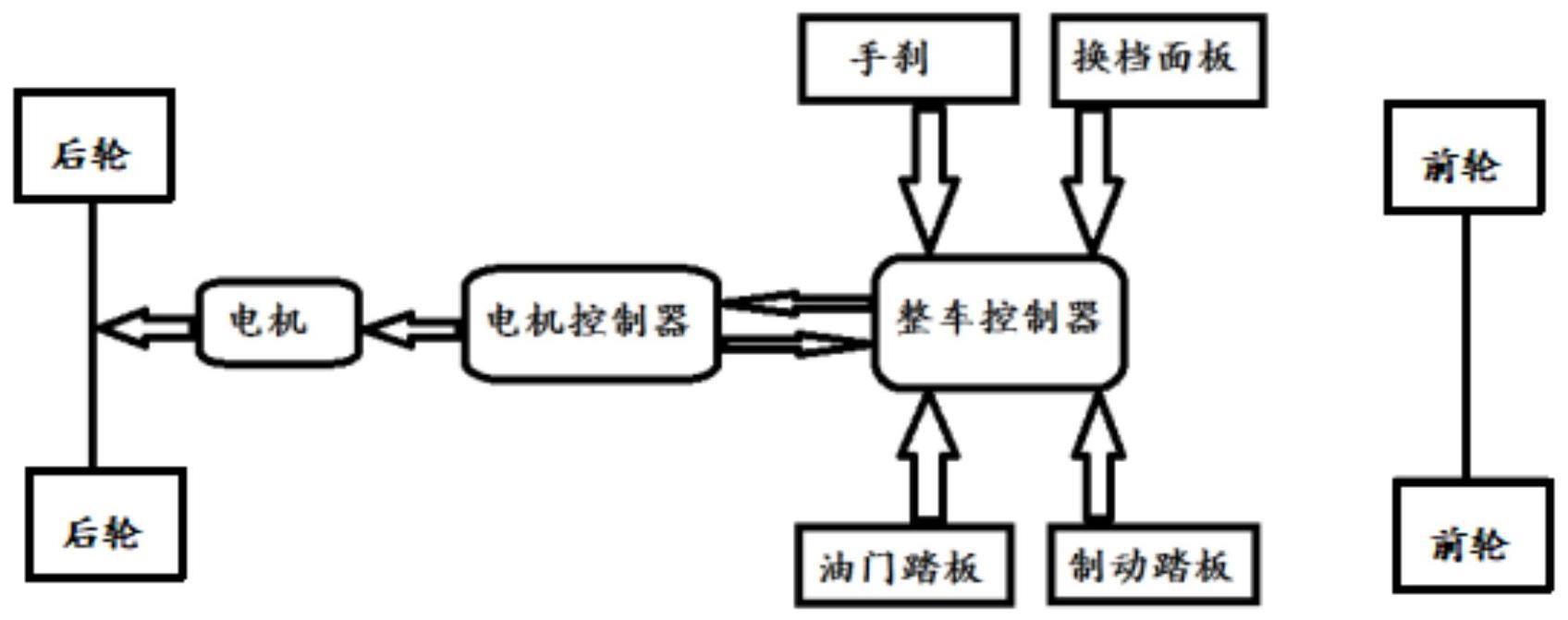
5、所述整车控制器接收检测车辆状态信息后并根据can总线协议将所述车辆状态信息及控制指令发送至所述电机控制器,所述电机控制器接收处理整车控制器发送的控制指令和状态信息后驱动电机进行运行,进入防溜坡控制模式或者起步控制模式;
6、所述车辆状态信息由油门踏板、制动踏板、换档面板以及手刹部件进行采集获取后按照can总线协议各自发送至所述整车控制器。
7、进一步的,所述整车控制器通过接收换档面板状态信息,经过对换挡面板信息进行分析处理后,向电机控制器发送前进或者后退的控制指令。
8、进一步的,所述整车控制器通过接收油门踏板、制动踏板以及手刹各部件的状态信息,并对状态信息进行分析处理后,向电机控制器发送目标扭矩以及制动信号。
9、进一步的,所述目标扭矩能利用油门踏板发送的状态信息获取,所述油门踏板的信号电压值能够换算成对应的目标扭矩。
10、进一步的,所述电机控制器能够实时监测电机转速,若油门踏板开度为0,手刹松开及刹车踏板开度小于30%且电机运行方向与当前整车控制器发送的控制指令中前进或者后退指令相反,则进入防溜坡模式。
11、进一步的,在防溜坡模式中,电机控制器采集并保存电机实时运行信息,通过算法利用转速变化大小来计算输出扭矩变化率和大小并根据扭矩值控制电机输出,完成防溜坡功能。
12、进一步的,同时,电机控制器将电机实时运行信息、扭矩变化率以及防溜坡扭矩值根据can总线协议发送给整车控制器。
13、当坡上起步操作时,整车控制器根据油门踏步开度变化,结合接收的电机控制器发送的扭矩变化率和大小,计算出目标扭矩并根据can总线协议发送至电机控制器中,根据电机控制器发送的扭矩值大小判断此时坡道所需要的扭矩大小以满足不后溜,在此扭矩基础上结合扭矩变化率对应计算扭矩值,使得计算扭矩值大于防溜坡扭矩值,实现披上起步操作。
14、据一些实施例,本公开采用如下技术方案:
15、一种电动客车防溜坡和起步控制方法,包括:
16、当此时车辆在坡道上为前进方向,司机踩下制动踏板在坡道上停止后,在松开制动踏板但未踩油门踏板时,整车控制器采集车辆档位状态、制动踏板开度值、油门踏板开度值以及手刹状态发送至电机控制器;
17、当电机控制器接收状态信息为档位状态为前进档、制动踏板开度小于30%、油门踏板开度为0以及手刹为松开状态时,此时检测到电机负转速小于-10转,则进入防溜坡模式;
18、所述电机控制器采集保存电机实时运行信息,根据电机转速数值计算出车速值,计算电机转速为负值与计算时的相对时间,利用车速值计算出相对时间后溜距离及时后溜车速加速度,通过车辆信息计算出防溜坡扭矩,利用力矩与相对时间计算出扭矩变化率;电机控制器根据防溜坡扭矩及扭矩变化率控制电机输出对应防溜坡扭矩,完成防溜坡模式。
19、同时,电机控制器将防溜坡扭矩及扭矩变化率根据can总线协议发送给整车控制器,在电机控制器操控防溜坡模式时,司机此时踩踏油门踏板要起步,整车控制器根据油门踏板开度结合电机控制器发送的防溜坡扭矩及扭矩变化率计算出目标扭矩,将此目标扭矩根据can总线协议发送给电机控制器;
20、电机控制器接收到大于防溜坡扭矩值的目标扭矩值时,退出防溜坡模式并控制电机根据目标扭矩值运行,此时完成防溜坡和起步操作。
21、与现有技术相比,本公开的有益效果为:
22、本公开根据电动客车基本动力原理基础上,在不增加电动客车额外硬件、成本的基础上,将整车控制器与电机控制器相结合实现及时且持续控制动力传动系统输出扭矩与后溜扭矩相平衡,可使客车在坡道上静止,给予驾驶员充分的时间进行起步操作;整车控制器与电机控制器的及时交互也可以实现驾驶员轻踩油门踏板即可在坡上及时起步;本发明让司机简单实现坡上快速防溜坡和快速起步操作,也有利于增强安全性和提高操作舒适度。同时,在不增加额外的车辆硬件(例如坡度传感器、陀螺仪、电子驻车系统等)前提下实现防溜坡和起步精准控制,有利于节约成本。
技术特征:
1.一种电动客车防溜坡和起步控制系统,其特征在于,包括:
2.如权利要求1所述的一种电动客车防溜坡和起步控制系统,其特征在于,所述整车控制器通过接收换档面板状态信息,经过对换档面板信息进行分析处理后,向电机控制器发送前进或者后退的控制指令。
3.如权利要求1所述的一种电动客车防溜坡和起步控制系统,其特征在于,所述整车控制器通过接收油门踏板、制动踏板以及手刹各部件的状态信息,并对状态信息进行分析处理后,向电机控制器发送目标扭矩以及制动信号。
4.如权利要求1所述的一种电动客车防溜坡和起步控制系统,其特征在于,所述目标扭矩能利用油门踏板发送的状态信息获取,所述油门踏板的信号电压值能够换算成对应的目标扭矩。
5.如权利要求1所述的一种电动客车防溜坡和起步控制系统,其特征在于,所述电机控制器能够实时监测电机转速,若油门踏板开度为0,手刹松开及刹车踏板开度小于30%且电机运行方向与当前整车控制器发送的控制指令中前进或者后退指令相反,则进入防溜坡模式。
6.如权利要求5所述的一种电动客车防溜坡和起步控制系统,其特征在于,在防溜坡模式中,电机控制器采集并保存电机实时运行信息,通过算法利用转速变化大小来计算输出扭矩变化率和大小并根据扭矩值控制电机输出,完成防溜坡功能。
7.如权利要求6所述的一种电动客车防溜坡和起步控制系统,其特征在于,同时,电机控制器将电机实时运行信息、扭矩变化率以及防溜坡扭矩值根据can总线协议发送给整车控制器。
8.如权利要求6所述的一种电动客车防溜坡和起步控制系统,其特征在于,当坡上起步操作时,整车控制器根据油门踏步开度变化,结合接收的电机控制器发送的扭矩变化率和大小,计算出目标扭矩并根据can总线协议发送至电机控制器中,根据电机控制器发送的扭矩值大小判断此时坡道所需要的扭矩大小以满足不后溜,在此扭矩基础上结合扭矩变化率对应计算扭矩值,使得计算扭矩值大于防溜坡扭矩值,实现披上起步操作。
9.基于如权利要求1-8任一项所述的一种电动客车防溜坡和起步控制方法,其特征在于,包括:
10.如权利要求9所述的一种电动客车防溜坡和起步控制方法,其特征在于,同时,电机控制器将防溜坡扭矩及扭矩变化率根据can总线协议发送给整车控制器,在电机控制器操控防溜坡模式时,司机此时踩踏油门踏板要起步,整车控制器根据油门踏板开度结合电机控制器发送的防溜坡扭矩及扭矩变化率计算出目标扭矩,将此目标扭矩根据can总线协议发送给电机控制器;
技术总结
本公开提供了一种电动客车防溜坡和起步控制方法及系统,涉及电动电机控制技术领域,包括整车控制器及电机控制器;所述整车控制器接收检测车辆状态信息后并根据CAN总线协议将所述车辆状态信息及控制指令发送至所述电机控制器,所述电机控制器接收处理整车控制器发送的控制指令和状态信息后驱动电机进行运行,进入防溜坡控制模式或者起步控制模式;所述车辆状态信息由油门踏板、制动踏板、换档面板以及手刹部件进行采集获取后按照CAN总线协议各自发送至所述整车控制器。本公开实现坡上快速防溜坡和快速起步操作,有利于增强安全性和操作舒适度。同时,在不增加额外的车辆硬件前提下实现防溜坡和起步精准控制。
技术研发人员:周国栋,汪余鑫,于东超,娄立坤,任甲鑫,黄志宇,吕天宝,李又祥,王效乐
受保护的技术使用者:中通客车股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!