用于悬架调平的控制方法及悬架调平控制装置与流程
本申请涉及工程机械,具体地涉及一种用于悬架调平的控制方法及悬架调平控制装置。
背景技术:
1、全地面起重机又称全路面起重机,包括油气悬架系统。油气悬架系统是多桥底盘的必要条件,除了能起到多轴平衡的作用外,还能起到增加整机侧倾刚度、克服制动前倾、调节车架高度和锁死悬架等功能。现有的油气悬架的全地面起重机,车辆通过悬架油缸上的接近开关对车辆进行调平后,在遇到斜坡、垂直障碍、涉水和颠簸路段等路况时,需将车辆停止后,人工操作相应的开关控制油气悬架的高度,将车体举升或下降到指定高度通过相应路况。但是手动调节悬架到相应的高度,因为不在悬架油缸的中位,不能对车辆进行调平。对于带上车的汽车起重机重量高达上百吨,如果重心偏离正常,很容易导致车辆倾翻,不适用于复杂多变的越野环境。
技术实现思路
1、本申请实施例的目的是提供一种用于悬架调平的控制方法及悬架调平控制装置,用以解决现有技术中全地面起重机在载重较大的情况下容易倾翻的问题。
2、为了实现上述目的,本申请第一方面提供一种用于悬架调平的控制方法,应用于悬架调平控制装置,悬架调平控制装置与多个位移传感器通信,多个位移传感器分别设置于多个悬架油缸上,每个悬架油缸分别控制一个悬架,该控制方法包括:
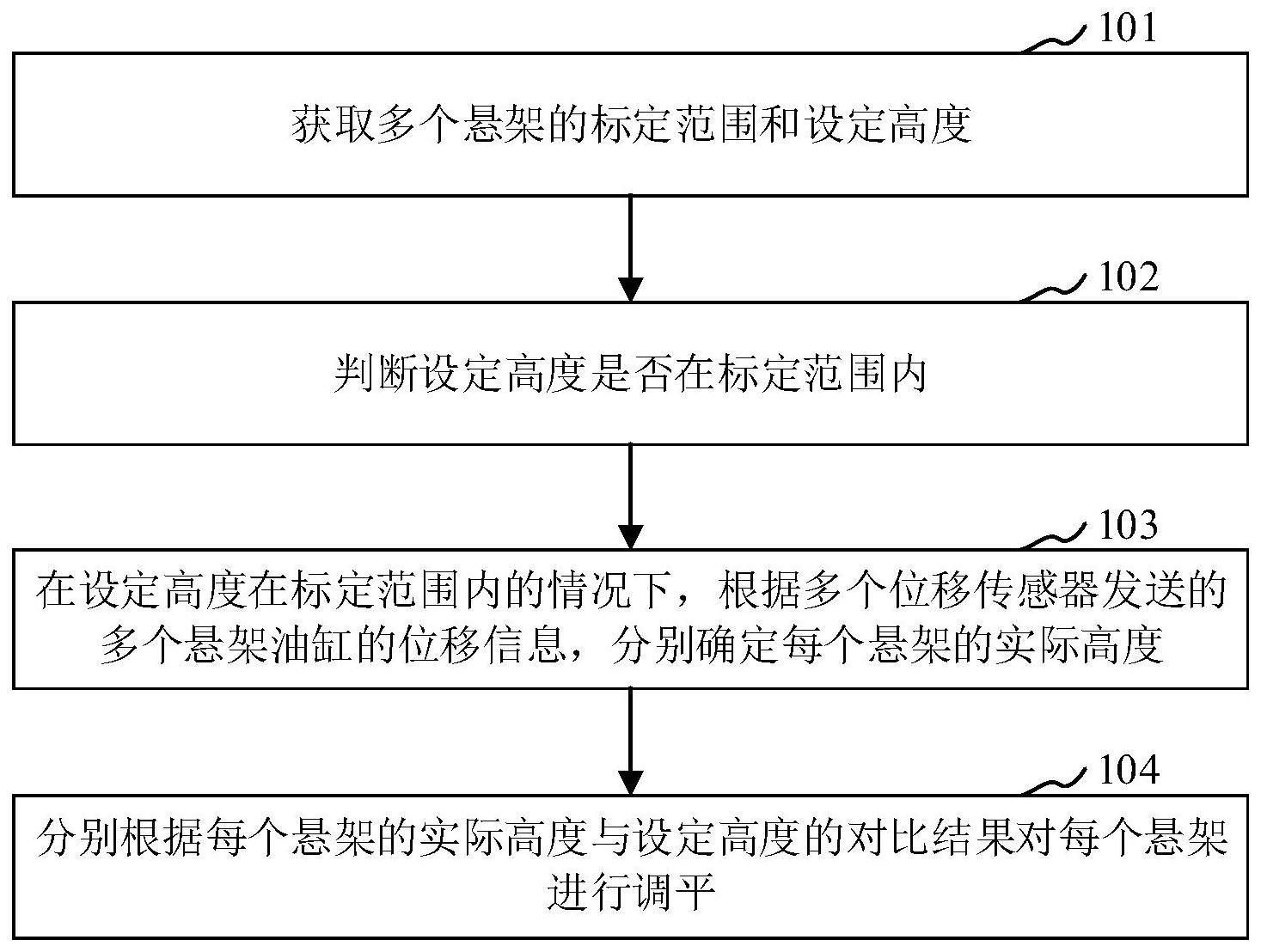
3、获取多个悬架的标定范围和设定高度;
4、判断设定高度是否在标定范围内;
5、在设定高度在标定范围内的情况下,根据多个位移传感器发送的多个悬架油缸的位移信息,分别确定每个悬架的实际高度;
6、分别根据每个悬架的实际高度与设定高度的对比结果对每个悬架进行调平。
7、在本申请实施例中,分别根据每个悬架的实际高度与设定高度的对比结果对每个悬架进行调平包括:
8、在当前悬架的实际高度大于设定高度的情况下,控制当前悬架的降阀得电,以控制当前悬架降低高度;
9、在当前悬架的实际高度小于设定高度的情况下,控制当前悬架的升阀得电,以控制当前悬架增加高度;
10、实时获取当前悬架调整后的实际高度;
11、在检测到调整后的实际高度在预设范围内的情况下,完成当前悬架的调平;
12、在未检测到调整后的实际高度在预设范围内的情况下,继续对当前悬架进行调平。
13、在本申请实施例中,获取多个悬架的标定范围包括:
14、控制多个悬架降低至最低位置,并接收第一目标位移传感器发送的第一数据集合;
15、将第一数据集合中的最小值确定为标定范围的最小值;
16、控制多个悬架升高至最高位置,并接收第二目标位移传感器发送的第二数据集合;
17、将第二数据集合中的最大值确定为标定范围的最大值;
18、其中,第一目标位移传感器设置于高度最大的悬架所对应的悬架油缸上,第二目标位移传感器设置于高度最小的悬架所对应的悬架油缸上。
19、在本申请实施例中,该控制方法还包括:
20、在设定高度不在标定范围的情况下,不对每个悬架进行调平。
21、在本申请实施例中,悬架调平控制装置还与显示装置通信,获取多个悬架的设定高度包括:
22、接收显示装置发送的设定高度。
23、在本申请实施例中,该控制方法还包括:
24、发送每个悬架的实际高度至显示装置。
25、本申请第二方面提供一种悬架调平控制装置,包括:
26、存储器,被配置成存储指令;以及
27、处理器,被配置成从存储器调用指令以及在执行指令时能够实现上述的用于悬架调平的控制方法。
28、本申请第三方面提供一种全地面起重机,包括:
29、上述的悬架调平控制装置;
30、多个悬架油缸,与悬架调平控制装置通信,每个悬架油缸分别用于控制一个悬架;
31、多个位移传感器,分别设置于多个悬架油缸上,与悬架调平装置通信,用于获取多个悬架油缸的位移信息,并将位移信息发送至悬架调平控制装置。
32、在本申请实施例中,该全地面起重机还包括:
33、显示装置,与悬架调平控制装置通信,用于接收输入的设定高度,将设定高度发送至悬架调平控制装置,以及接收调平控制装置发送的每个悬架的实际高度。
34、本申请第四方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行上述的用于悬架调平的控制方法。
35、通过上述技术方案,将悬架调平控制装置与多个位移传感器通信,多个位移传感器分别设置于多个悬架油缸上,每个悬架油缸分别控制一个悬架;悬架调平控制装置获取多个悬架的标定范围和设定高度,先判断设定高度是否在标定范围内;在设定高度在标定范围内的情况下,根据多个位移传感器发送的多个悬架油缸的位移信息,分别确定每个悬架的实际高度;再分别根据每个悬架的实际高度与设定高度的对比结果对每个悬架进行调平。本申请通过设置于悬架油缸的位移传感器获取悬架的实际高度,再基于设定高度控制悬架到指定位置,并对每个悬架进行调平,可以有效防止全地面起重机倾翻,进一步提升全地面起重机的越野通过性能。
36、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种用于悬架调平的控制方法,其特征在于,应用于悬架调平控制装置,所述悬架调平控制装置与多个位移传感器通信,所述多个位移传感器分别设置于多个悬架油缸上,每个悬架油缸分别控制一个悬架,所述控制方法包括:
2.根据权利要求1所述的控制方法,其特征在于,所述分别根据所述每个悬架的实际高度与所述设定高度的对比结果对所述每个悬架进行调平包括:
3.根据权利要求1所述的控制方法,其特征在于,获取多个悬架的标定范围包括:
4.根据权利要求1所述的控制方法,其特征在于,所述控制方法还包括:
5.根据权利要求1所述的控制方法,其特征在于,所述悬架调平控制装置还与显示装置通信,获取多个悬架的设定高度包括:
6.根据权利要求5所述的控制方法,其特征在于,所述控制方法还包括:
7.一种悬架调平控制装置,其特征在于,包括:
8.一种全地面起重机,其特征在于,包括:
9.根据权利要求8所述的全地面起重机,其特征在于,还包括:
10.一种机器可读存储介质,其特征在于,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据权利要求1至6中任一项所述的用于悬架调平的控制方法。
技术总结
本申请公开了一种用于悬架调平的控制方法及悬架调平控制装置。该悬架调平控制装置与多个位移传感器通信,多个位移传感器分别设置于多个悬架油缸上,每个悬架油缸分别控制一个悬架。该控制方法包括:获取多个悬架的标定范围和设定高度;判断设定高度是否在标定范围内;在设定高度在标定范围内的情况下,根据多个位移传感器发送的多个悬架油缸的位移信息,分别确定每个悬架的实际高度;分别根据每个悬架的实际高度与设定高度的对比结果对每个悬架进行调平。本申请可以有效防止全地面起重机倾翻,进一步提升全地面起重机的越野通过性能。
技术研发人员:奉松生,蒋佳利
受保护的技术使用者:中联重科股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!