基于V2V的前前车受遮挡情况下自车紧急制动控制方法与流程
本发明涉及车辆智能辅助驾驶领域,具体涉及一种基于v2v的前前车受遮挡情况下自车紧急制动控制方法。
背景技术:
1、车辆在道路行驶过程中,通常驾驶员只能看到前方车辆,只能根据前方车辆的车速、与前方车辆的距离等信息作出加减速、制动等操作判断。而当前车遮挡前前车,且前前车突然减速或紧急制动时,若前车未能及时作出响应,此时自车很容易与前车及前前车发生碰撞,危及驾驶员和乘客的生命安全。
技术实现思路
1、有鉴于此,本发明提供了一种基于v2v的前前车受遮挡情况下自车紧急制动控制方法,在受遮挡的前前车在减速、紧急制动而前车未及时作出响应时,能够及时作出判断并进行预警、减速、紧急制动等操作,避免碰撞的发生或降低碰撞的损害程度。
2、为了解决上述技术问题,本发明是这样实现的:
3、基于v2v的前前车受遮挡情况下自车紧急制动控制方法,在各个车辆上安装车载单元(obu),使车辆将各自的行驶信息与其他车辆共享;车辆根据其前前车所共享的所述行驶信息进行制动判断,并根据所述制动判断的结果进行制动。
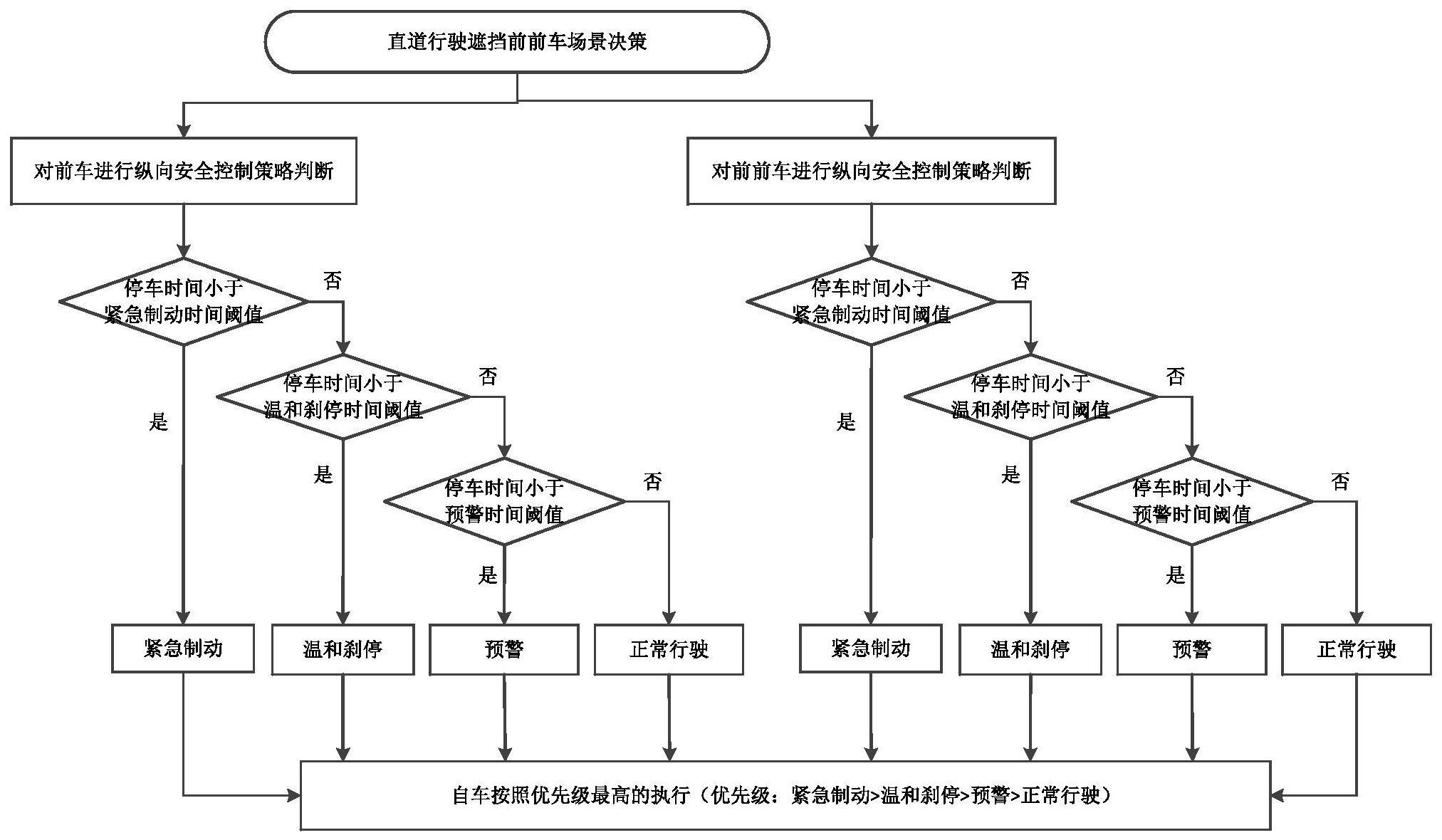
4、较佳地,分别独立地针对前车或前前车进行制动判断;针对前车或前前车所得的两个制动判断的结果,依照命令优先级关系,执行其中优先级最高的命令。
5、较佳地,所述制动判断包括:
6、步骤1,通过obu、车载摄像头和/或毫米波雷达得到目标车辆的所述行驶信息;
7、步骤2,根据所述行驶信息得到一般碰撞时间t和最小碰撞时间thw;
8、步骤3,将所述一般碰撞时间t和一组一般判断阈值进行比较,根据比较结果输出一般制动命令;
9、步骤4,所述最小碰撞时间thw和一组最小判断阈值进行比较,根据比较结果输出最小制动命令;
10、步骤5,根据所述步骤3和所述步骤4的输出,依照命令优先级关系,执行所述一般制动命令和所述最小制动命令中优先级最高的命令。
11、较佳地,所述行驶信息为,车辆的速度、加速度和/或位置。
12、较佳地,所述一般碰撞时间t,依情况分为第一一般碰撞时间tts和第二一般碰撞时间ttc;
13、所述第一一般碰撞时间tts为,当本车与目标车辆的加速度不相等且满足条件(vtv-vsv)2-2×(atv-asv)×xc>0时,
14、
15、其中,atv为目标车辆的加速度,asv为本车的加速度,vsv为本车的车速,vtv为目标车辆的车速,xc为本车与目标车辆的车间距离;
16、所述第二一般碰撞时间ttc为,当本车与目标车辆的加速度相等,或不满足条件(vtv-vsv)2-2×(atv-asv)×xc>0时,其中,vr为本车与目标车辆的相对车速。
17、较佳地,所述最小碰撞时间thw为,
18、较佳地,所述一般判断阈值包括一般紧急制动时间阈值t1、一般温和刹停时间阈值t2、一般预警时间阈值t3;所述一般判断阈值根据实际情况标定;当t<t1时,输出紧急制动命令;当t1<t<t2时,输出温和刹停命令;当t2<t<t3时,输出预警命令;否则输出正常行驶命令。
19、较佳地,所述最小判断阈值包括最小紧急制动时间阈值t4、最小温和刹停时间阈值t5、最小预警时间阈值t6;所述最小判断阈值根据实际情况标定;当thw<t4时,输出紧急制动命令;当t4<thw<t5时,输出温和刹停命令;当t5<thw<t6时,输出预警命令;否则输出正常行驶命令。
20、较佳地,所述命令优先级关系为,紧急制动>温和刹停>预警>正常行驶。
21、较佳地,所述步骤3和所述步骤4同步进行。
22、有益效果:
23、1、本发明通过分析车载摄像头、毫米波雷达以及周围车辆车载单元输出的信息,自车可以及时作出减速、紧急制动等操作,从而有效避免碰撞或减轻碰撞的损害程度。
24、2、本发明通过在车辆上加装obu进行v2v通信,在受遮挡的前前车在减速、紧急制动而前车未及时作出响应时,车辆仍然可以进行制动判断,相较于依赖视野的判断方式进一步提升了安全性。
25、3、本发明通过算法的自动处理,对高速路段中车辆多、行驶速度快的场景,可有效避免事故的发生,或降低事故的危害程度。
26、4、本发明通过最小碰撞时间的设置,在根据相对速度和加速度进行判断的基础上,进一步提升了安全性保障。
27、5、本发明通过根据实际情况进行标定的判断阈值,不仅区分了不同命令的输出场景,而且可以根据不同使用场景灵活调整,提升了方法的可适用性。
28、6、本发明通过设置命令优先级关系,在保证行驶安全的基本目的的基础上也尽可能地保证了驾乘舒适性。
技术特征:
1.基于v2v的前前车受遮挡情况下自车紧急制动控制方法,其特征在于,在各个车辆上安装车载单元(obu),使车辆将各自的行驶信息与其他车辆共享;车辆根据其前前车所共享的所述行驶信息进行制动判断,并根据所述制动判断的结果进行制动。
2.如权利要求1所述的基于v2v的前前车受遮挡情况下自车紧急制动控制方法,其特征在于,分别独立地针对前车或前前车进行制动判断;针对前车或前前车所得的两个制动判断的结果,依照命令优先级关系,执行其中优先级最高的命令。
3.如权利要求1或2所述的基于v2v的前前车受遮挡情况下自车紧急制动控制方法,其特征在于,所述制动判断包括:
4.如权利要求1所述的基于v2v的前前车受遮挡情况下自车紧急制动控制方法,其特征在于,所述行驶信息为:车辆的速度、加速度和/或位置。
5.如权利要求3所述的基于v2v的前前车受遮挡情况下自车紧急制动控制方法,其特征在于,所述一般碰撞时间t,依情况分为第一一般碰撞时间tts和第二一般碰撞时间ttc;
6.如权利要求3所述的基于v2v的前前车受遮挡情况下自车紧急制动控制方法,其特征在于,所述最小碰撞时间
7.如权利要求3所述的基于v2v的前前车受遮挡情况下自车紧急制动控制方法,其特征在于,所述一般判断阈值包括一般紧急制动时间阈值t1、一般温和刹停时间阈值t2、一般预警时间阈值t3;所述一般判断阈值根据实际情况标定;当t<t1时,输出紧急制动命令;当t1<t<t2时,输出温和刹停命令;当t2<t<t3时,输出预警命令;否则输出正常行驶命令。
8.如权利要求3所述的基于v2v的前前车受遮挡情况下自车紧急制动控制方法,其特征在于,所述最小判断阈值包括最小紧急制动时间阈值t4、最小温和刹停时间阈值t5、最小预警时间阈值t6;所述最小判断阈值根据实际情况标定;当thw<t4时,输出紧急制动命令;当t4<thw<t5时,输出温和刹停命令;当t5<thw<t6时,输出预警命令;否则输出正常行驶命令。
9.如权利要求2所述的基于v2v的前前车受遮挡情况下自车紧急制动控制方法,其特征在于,所述命令优先级关系为,紧急制动>温和刹停>预警>正常行驶。
10.如权利要求3所述的基于v2v的前前车受遮挡情况下自车紧急制动控制方法,其特征在于,所述步骤3和所述步骤4同步进行。
技术总结
本发明公开了一种基于V2V的前前车受遮挡情况下自车紧急制动控制方法,在各个车辆上安装车载单元,使车辆将各自的行驶信息与其他车辆共享;车辆根据其前前车所共享的所述行驶信息进行制动判断,并根据所述制动判断的结果进行制动;使用本发明能够在受遮挡的前前车在减速、紧急制动而前车未及时作出响应时,及时作出判断并进行预警、减速、紧急制动等操作,避免碰撞的发生或降低碰撞的损害程度。
技术研发人员:盛蒙蒙,祝宝营,颜培硕,欧阳康强
受保护的技术使用者:北京理工雷科电子信息技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!