一种驻车装置以及微创机器人的制作方法
本技术涉及微创机器人,具体涉及一种驻车装置以及微创机器人。
背景技术:
1、常见的微创手术机器人由医生控制台、患者侧手推车和显示设备组成,外科医生在医生控制台操作输入装置,并将输入传给与远程操作的外科器械连接的患者侧手推车。基于在医生控制台的外科医生的输入,远程操作的外科器械在患者侧手推车处被致动以对患者动手术,从而产生医生控制台和在患者侧手推车的外科器械之间的主从控制关系。由于占地面积和设备成本的考量,医院通常无法配备多台微创手术机器人,因此微创手术机器人经常需要从一个位置移动至另一个位置。例如,从手术室中的一个位置移动至同一手术室中的另一个位置,或者,从一个手术室移动至另一个手术室。在机器人移动完毕后,为了保证手术或储存过程中的设备稳定,需要对其进行驻车。
2、其中,中国实用新型专利cn209091630u公开了一种驻车装置、手术台车及手术机器人,其中所述驻车装置包括支撑机构,所述支撑机构在伸出状态时抵触地面,在缩回状态时离开地面,所述支撑机构的数量为多个,所述驻车装置还具有控制机构,各个所述支撑机构由所述控制机构同步控制进行伸缩运动。
3、中国实用新型专利cn214104616u公开了一种支撑装置及底座,支撑装置包括:主体、移动机构及升降机构,移动机构设置于所述主体上;升降机构设置于所述主体上,所述升降机构具有升降部、制动部及复位部,所述升降部沿朝向或远离所述移动机构的移动面方向移动,以使其能够支撑或释放所述移动机构移动的物体,所述制动部、所述复位部均与所述升降部相连接,所述制动部用于触发时固定所述升降部于当前位置,所述复位部用于释放所述制动部后通过弹性力驱动所述升降部朝向释放所述物体的方向移动,以令所述复位部能够释放支撑的所述物体。
4、首先,上述专利方案均是采用带伸缩装置的驻车机构,由伸缩装置抵住地面实现驻车,需要额外的伸缩杆结构、影响了机器人的集成度,且通常其传动机构结构复杂,生产和维护成本高;
5、其次,刹停和放松时脚踏操作不够简便,一个方向操作较为简单,但向另一个方向操作时就比较困难。
6、因此,亟待发明一种可以结构简单、成本低、操作方便的驻车装置。
技术实现思路
1、本实用新型要解决的技术问题是:为了解决现有技术中的问题。本实用新型提供了一种结构简单、成本低、操作方便的驻车装置。
2、本实用新型解决其技术问题所采用的技术方案是:
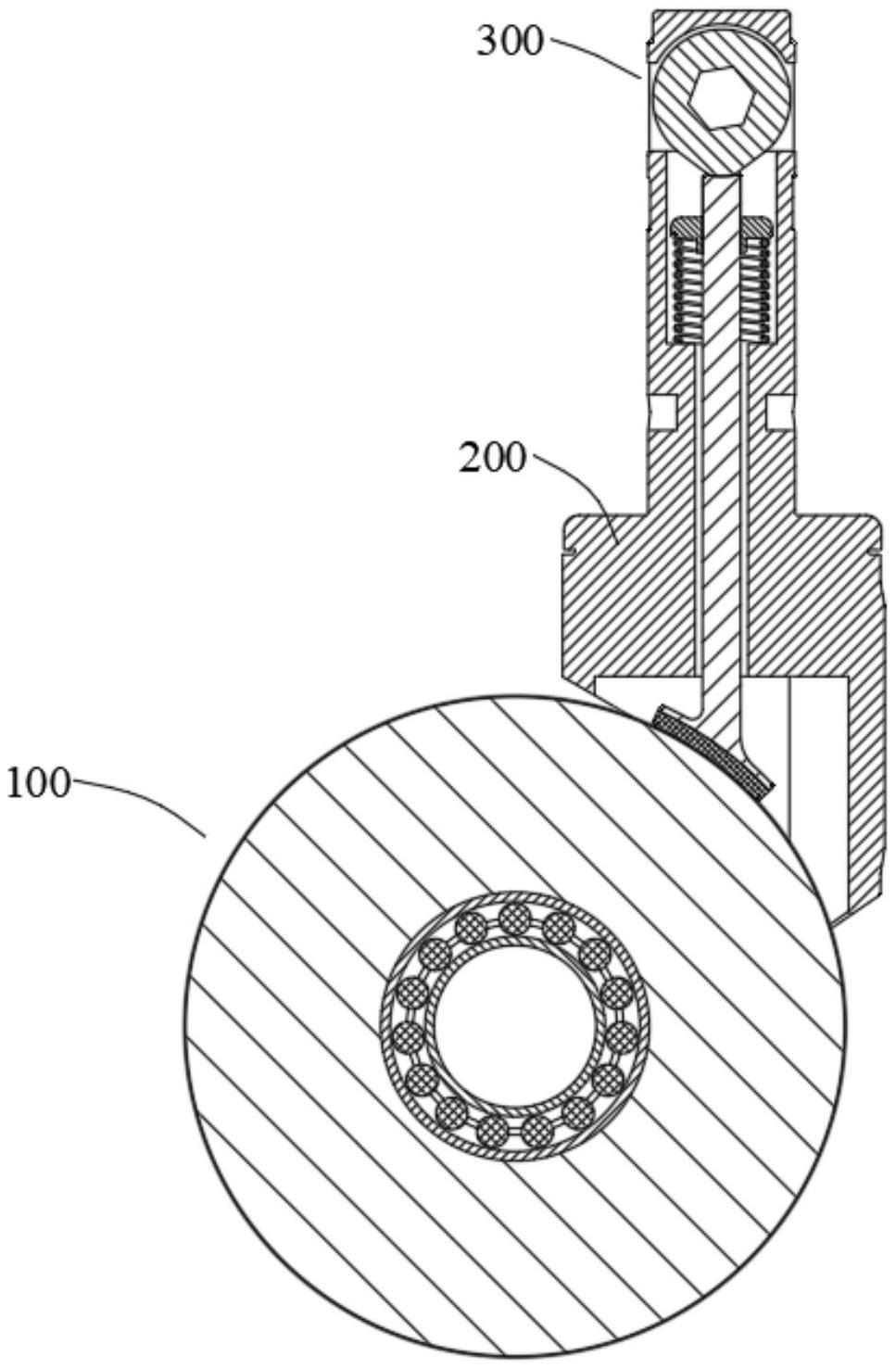
3、一种驻车装置,包括脚轮和设置在脚轮上的支架本体,所述驻车装置还包括一集成于所述支架本体内的伸缩装置和与所述伸缩装置联动的驱动装置,其中
4、当所述驱动装置位于驻停工位时,所述驱动装置适于驱动所述伸缩装置,以使所述脚轮处于驻停状态。
5、作为优选,所述伸缩装置包括位于所述支架本体的内腔中的推杆本体;
6、以及所述推杆本体的下端固定有一驻车片,所述驻车片与所述推杆本体相对静止。
7、作为优选,所述支架本体的内部具有一台阶腔;
8、所述伸缩装置还包括固定在所述推杆本体上的弹簧盖帽和套设在所述推杆本体上的复位弹簧;其中,所述复位弹簧的一端抵住所述弹簧盖帽,另一端与所述台阶腔的台阶面相抵。
9、作为优选,所述驱动装置包括驻车杆和固定在所述驻车杆上的驱动凸轮,以及
10、所述驻车杆转动连接在所述支架本体上,其中
11、当所述驻车杆转动时,所述驱动凸轮适于顶推所述推杆本体。
12、作为优选,所述推杆本体的上端具有一与所述驱动凸轮的凸端相互适配的凹口;以及
13、当所述推杆本体位于所述驻停工位时,所述驱动凸轮的凸端的端面与所述凹口的凹面贴合形成自锁结构。
14、作为优选,所述驻车杆上固定有一驻车踏板和一触碰压块,所述驻车踏板的转动轴位于所述驻车踏板水平表面的1/2至1/3处之间。
15、作为优选,所述驻车杆上远离所述驱动凸轮的一端固定有一辅助支架体。
16、作为优选,所述支架本体上固定有一适于与机器人支架连接的轮架体。
17、作为优选,所述轮架体包括罩体和固定在所述罩体侧壁的若干安装耳,
18、所述罩体上开设有一适于所述驻车杆贯穿的安装孔,
19、所述罩体罩设固定在所述支架本体上;
20、或者
21、所述轮架体包括内环体和固定在所述内环体侧壁的外环体,
22、所述内环体套设固定在所述支架本体上。
23、本实用新型的有益效果是通过脚轮实现行进,通过支架本体的设置,为伸缩装置提供一个良好的安装条件以及安装空间,便于保护伸缩装置;通过驱动装置,实现伸缩装置的伸缩以实现脚轮的驻停,整体过程简便,结构简单,操作快捷。
24、本实用新型还提供了一种微创机器人,包括如上所述的驻车装置。
25、本实用新型的有益效果是此种微创机器人,驻车便捷,操作方便。
技术特征:
1.一种驻车装置,包括脚轮和设置在脚轮上的支架本体,其特征在于,所述驻车装置还包括一集成于所述支架本体内的伸缩装置和与所述伸缩装置联动的驱动装置,其中
2.如权利要求1所述的驻车装置,其特征在于,
3.如权利要求2所述的驻车装置,其特征在于,
4.如权利要求2或3所述的驻车装置,其特征在于,
5.如权利要求4所述的驻车装置,其特征在于,
6.如权利要求4所述的驻车装置,其特征在于,
7.如权利要求4所述的驻车装置,其特征在于,
8.如权利要求4~7任一所述的驻车装置,其特征在于,
9.如权利要求8所述的驻车装置,其特征在于,
10.一种微创机器人,其特征在于,包括如权利要求1~9任一所述的驻车装置。
技术总结
本技术提供了一种驻车装置以及微创机器人,此种驻车装置包括脚轮和设置在脚轮上的支架本体,驻车装置还包括一集成于支架本体内的伸缩装置和与伸缩装置联动的驱动装置,其中当驱动装置位于驻停工位时,驱动装置适于驱动伸缩装置,以使脚轮处于驻停状态;当驱动装置复位时,伸缩装置适于复位以使脚轮脱离驻停状态。通过脚轮实现行进,通过支架本体的设置,为伸缩装置提供一个良好的安装条件以及安装空间,便于保护伸缩装置;通过驱动装置,实现伸缩装置的伸缩以实现脚轮的驻停,整体过程简便,结构简单,操作快捷。
技术研发人员:请求不公布姓名
受保护的技术使用者:杭州唯精医疗机器人有限公司
技术研发日:20220411
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!