分体式碰撞传感器及无人车的制作方法
本技术涉及车辆,具体而言,涉及一种分体式碰撞传感器及无人车。
背景技术:
1、碰撞传感器是安全气囊系统中的控制信号输入装置;其作用是在汽车发生碰撞时,由碰撞传感器检测汽车碰撞的强度信号,并将信号输入安全气囊电脑,安全气囊电脑根据碰撞传感器的信号来判定是否引爆充气元件使气囊充气。
2、常规碰撞传感器多采用一体结构,其造型较单一,且在使用中容易受力损坏,维修更换成本较高。
技术实现思路
1、本实用新型的目的在于提供一种分体式碰撞传感器及无人车,以在一定程度上解决现有技术中存在的碰撞传感器造型较单一以及维修更换成本较高的技术问题。
2、为了实现上述目的,本实用新型提供了以下技术方案:
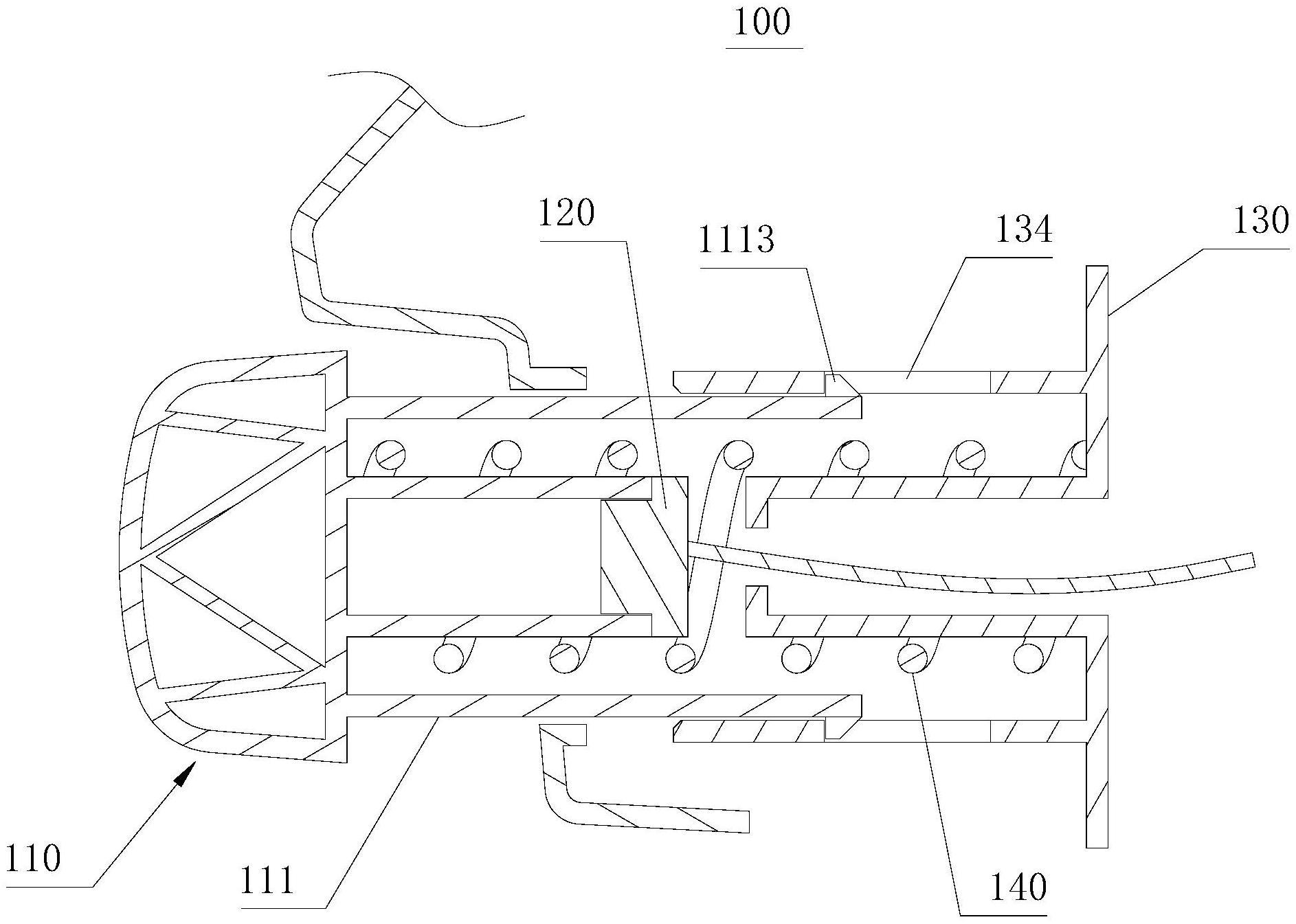
3、一种分体式碰撞传感器,包括防撞杆、电芯和至少一个底座;所述底座的数量为多个时,多个所述底座沿所述防撞杆的延伸方向依次设置;
4、所述防撞杆包括防撞杆连接部;所述防撞杆连接部与所述底座可拆装连接;
5、所述防撞杆连接部与所述底座连接后形成的空腔中设置有所述电芯;
6、被配置为朝所述底座移动预设距离的所述防撞杆连接部,能够驱使所述电芯产生碰撞触发信号。
7、在上述任一技术方案中,可选地,所述底座包括底座套筒、底座内柱和底座基板;所述底座套筒和所述底座内柱分别与所述底座基板固定连接,且所述底座内柱位于所述底座套筒内部;
8、所述防撞杆连接部与所述底座套筒可滑动连接;
9、所述电芯固定在所述防撞杆连接部上;被配置为朝所述底座移动预设距离的所述防撞杆连接部,能够驱使所述电芯抵接所述底座内柱并产生碰撞触发信号。
10、在上述任一技术方案中,可选地,所述防撞杆还包括与所述防撞杆连接部固定连接的防撞杆本体;
11、所述防撞杆连接部包括杆部套筒和杆部内柱;所述杆部套筒和所述杆部内柱分别与所述防撞杆本体固定连接,且所述杆部内柱位于所述杆部套筒的内部;
12、所述杆部套筒与所述底座套筒可滑动连接;
13、所述电芯固定在所述杆部内柱上。
14、在上述任一技术方案中,可选地,所述的分体式碰撞传感器还包括用于令所述防撞杆连接部远离所述底座的弹性件;
15、所述弹性件外套在所述底座内柱和所述杆部内柱上,且所述弹性件位于所述底座套筒和所述杆部套筒的内部;
16、所述弹性件与所述电芯之间绝缘。
17、在上述任一技术方案中,可选地,所述底座套筒设置有滑槽;所述杆部套筒固定连接有滑块;
18、所述滑块设置在所述滑槽内部,且所述滑块能够沿所述滑槽往复移动,以使所述防撞杆连接部能够沿所述底座往复移动。
19、在上述任一技术方案中,可选地,所述底座内柱的顶面设置有用于令所述电芯的电线通过的通孔;
20、所述底座内柱的顶面设置有导电体,或者所述底座内柱的顶面为导电体;
21、被配置为朝所述底座移动预设距离的所述防撞杆连接部,能够驱使所述电芯抵接所述导电体并产生碰撞触发信号。
22、在上述任一技术方案中,可选地,沿所述防撞杆连接部的移动方向,所述底座套筒的高度大于所述底座内柱的高度,所述杆部套筒的高度大于所述杆部内柱的高度;
23、所述电芯与所述底座内柱之间的最小距离,小于等于所述杆部套筒与所述底座套筒之间可滑动的最大距离。
24、在上述任一技术方案中,可选地,所述防撞杆的材质为碳纤维、pp、树脂或者高分子塑料,所述防撞杆采用搪塑、注塑或者吹塑而成;或者,所述防撞杆本体的材质为碳纤维、pp、树脂或者高分子塑料,所述防撞杆本体采用搪塑、注塑或者吹塑而成;
25、所述底座的材质为铝、铜或者不锈钢。
26、在上述任一技术方案中,可选地,所述防撞杆连接部与所述底座之间设置有弹性件;所述弹性件处于压缩状态。
27、一种无人车,包括分体式碰撞传感器。
28、在上述任一技术方案中,可选地,无人车还包括保险杠和车架;
29、所述分体式碰撞传感器的底座与所述车架固定连接;
30、所述分体式碰撞传感器的防撞杆设置在所述保险杠的下方。
31、本实用新型的有益效果主要在于:
32、本实用新型提供的分体式碰撞传感器及无人车,包括防撞杆、电芯和底座;其防撞杆的防撞杆连接部与底座可滑动连接,在防撞杆连接部朝底座移动预设距离时,电芯产生碰撞触发信号,实现碰撞传感器的功能。该分体式碰撞传感器的防撞杆与底座分离,可便于防撞杆制作不同的造型;由于底座与防撞杆分离,在使用中防撞杆容易受力损坏,只需要更换防撞杆即可,极大降低了维修更换成本。
33、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合附图,作详细说明如下。
技术特征:
1.一种分体式碰撞传感器,其特征在于,包括防撞杆、电芯和至少一个底座;所述底座的数量为多个时,多个所述底座沿所述防撞杆的延伸方向依次设置;
2.根据权利要求1所述的分体式碰撞传感器,其特征在于,所述底座包括底座套筒、底座内柱和底座基板;所述底座套筒和所述底座内柱分别与所述底座基板固定连接,且所述底座内柱位于所述底座套筒内部;
3.根据权利要求2所述的分体式碰撞传感器,其特征在于,所述防撞杆还包括与所述防撞杆连接部固定连接的防撞杆本体;
4.根据权利要求3所述的分体式碰撞传感器,其特征在于,所述分体式碰撞传感器还包括用于令所述防撞杆连接部远离所述底座的弹性件;所述弹性件外套在所述底座内柱和所述杆部内柱上,且所述弹性件位于所述底座套筒和所述杆部套筒的内部;所述弹性件与所述电芯之间绝缘;
5.根据权利要求3所述的分体式碰撞传感器,其特征在于,所述底座内柱的顶面设置有用于令所述电芯的电线通过的通孔;
6.根据权利要求3所述的分体式碰撞传感器,其特征在于,沿所述防撞杆连接部的移动方向,所述底座套筒的高度大于所述底座内柱的高度,所述杆部套筒的高度大于所述杆部内柱的高度;
7.根据权利要求3所述的分体式碰撞传感器,其特征在于,所述防撞杆的材质为碳纤维、pp、树脂或者高分子塑料,所述防撞杆采用搪塑、注塑或者吹塑而成;或者,所述防撞杆本体的材质为碳纤维、pp、树脂或者高分子塑料,所述防撞杆本体采用搪塑、注塑或者吹塑而成;
8.根据权利要求1所述的分体式碰撞传感器,其特征在于,所述防撞杆连接部与所述底座之间设置有弹性件;所述弹性件处于压缩状态。
9.一种无人车,其特征在于,包括如权利要求1-8任一项所述的分体式碰撞传感器。
10.根据权利要求9所述的无人车,其特征在于,还包括保险杠和车架;
技术总结
一种分体式碰撞传感器及无人车,涉及自动驾驶、无人驾驶车辆技术领域。该分体式碰撞传感器包括防撞杆、电芯和至少一个底座;所述底座的数量为多个时,多个所述底座沿所述防撞杆的延伸方向依次设置;所述防撞杆包括防撞杆连接部;所述防撞杆连接部与所述底座可拆装连接;所述防撞杆连接部与所述底座连接后形成的空腔中设置有所述电芯;被配置为朝所述底座移动预设距离的所述防撞杆连接部,能够驱使所述电芯产生碰撞触发信号。该无人车包括分体式碰撞传感器。本技术的目的在于提供一种分体式碰撞传感器及无人车,以在一定程度上解决现有技术中存在的碰撞传感器造型较单一以及维修更换成本较高的技术问题。
技术研发人员:李志恩
受保护的技术使用者:新石器慧通(北京)科技有限公司
技术研发日:20220901
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!