一种辅助机器人回收物品的装置的制作方法
本技术涉及辅助机器人回收容器更换,具体为一种辅助机器人回收物品的装置。
背景技术:
1、在运用机器人回收物品的工作场景中,机器人需要对已经装满回收物的容器进行更换或取走容器内装的回收物品,容器内有足够的空间,机器人才能去回收物品;机器人回收物品时需要带着容器一起移动,人员把回收的物品存放进容器,容器装满时需要人员来更换,当容器的重量很重时,人员搬运时费时费力,机器人等待更换容器的时间也会增长;大多数回收物品的工作场景还是依靠人工去回收。
2、现有市场上的机器人很少考虑回收过程中更换容器的问题;大多数场景还是靠人工去回收,在部分存在感染风险的场景中,人员进去作业会有感染的风险。此类型回收物品场景中的缺点:1、回收过程中需要人力作业,增加人工成本;2、更换容器时间长,机器人等待时间久;3、容器重量大时,人员不容易操作;所以市面上迫切需要能改进的技术,以解决上述问题。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种辅助机器人回收物品的装置,减少过程中人为作业,辅助人员更容易更换装置内的容器,提高更换储存容器的速度,增加机器人工作效率,容器位置可进行调节,而且固定精准,减轻背板重量,开合方便,满足使用需求,可以有效解决背景技术中的问题。
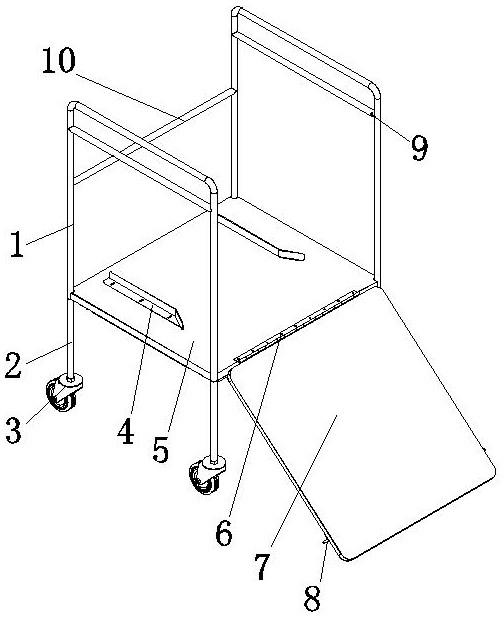
2、为实现上述目的,本实用新型提供如下技术方案:一种辅助机器人回收物品的装置,包括支撑架、支撑台板、背板和限位板,所述支撑台板固定在支撑架上,限位板采用角钢支撑,限位板前端设置有向外的折弯部,限位板的水平面上设置有调节孔,限位板设置为两个,限位板采用螺栓穿过调节孔固定在支撑台板上,所述背板通过合页与支撑台板的前端转动连接,背板的背面远离合页的一侧设置有插销,支撑架的内侧面上设置有与插销对应的销孔,支撑架的后侧设置有后部档杆。
3、进一步的,所述背板由上层板、下层板和背板框架组成,背板框架为矩形结构,上层板和下层板分别固定在背板框架的上表面和下表面。
4、进一步的,所述支撑台板的下表面设置有台板支撑框,台板支撑框与支撑架固定连接,台板支撑框上设置有框架竖筋,框架竖筋与台板支撑框内侧面之间设置有斜撑筋。
5、进一步的,所述支撑架的下端设置有支撑腿,支撑腿的下端安装有万向轮。
6、进一步的,所述调节孔为长孔,单个所述限位板上设置有三个调节孔,且调节孔等间距分布。
7、与现有技术相比,本实用新型的有益效果是:
8、1、本实用新型上设置了限位板,通过限位板对容器的位置进行限制,确保其位置固定精准,限位板端部向外的折弯部,便于容器进出,背板收起后,通过插销与销孔配合,便于将其固定,通过调节孔能够调节限位板之间的距离,而且固定方便,可以根据机器人所需要的捕捉位置进行调整,满足使用需求。
9、2、本实用新型上设置了背板,通过背板设计为中空结构,降低背板的重量,方便工作收起和展开,同时为了保证背板的强度,在其上层板与下层板之间设计背板框架,背板展开后,容器可沿着背板向下搬运,节省体力。
10、3、本实用新型减少过程中人为作业,辅助人员更容易更换装置内的容器,提高更换储存容器的速度,增加机器人工作效率,容器位置可进行调节,而且固定精准,减轻背板重量,开合方便,满足使用需求。
技术特征:
1.一种辅助机器人回收物品的装置,包括支撑架(1)、支撑台板(5)、背板(7)和限位板(4),其特征在于:所述支撑台板(5)固定在支撑架(1)上,限位板(4)采用角钢支撑,限位板(4)前端设置有向外的折弯部(12),限位板(4)的水平面上设置有调节孔(11),限位板(4)设置为两个,限位板(4)采用螺栓穿过调节孔(11)固定在支撑台板(5)上,所述背板(7)通过合页(6)与支撑台板(5)的前端转动连接,背板(7)的背面远离合页(6)的一侧设置有插销(8),支撑架(1)的内侧面上设置有与插销(8)对应的销孔(9),支撑架(1)的后侧设置有后部档杆(10)。
2.根据权利要求1所述的一种辅助机器人回收物品的装置,其特征在于:所述背板(7)由上层板(16)、下层板(17)和背板框架(18),背板框架(18)为矩形结构,上层板(16)和下层板(17)分别固定在背板框架(18)的上表面和下表面。
3.根据权利要求1所述的一种辅助机器人回收物品的装置,其特征在于:所述支撑台板(5)的下表面设置有台板支撑框(13),台板支撑框(13)与支撑架(1)固定固定连接,台板支撑框(13)上设置有框架竖筋(14),框架竖筋(14)与台板支撑框(13)内侧面之间设置有斜撑筋(15)。
4.根据权利要求1所述的一种辅助机器人回收物品的装置,其特征在于:所述支撑架(1)的下端设置有支撑腿(2),支撑腿(2)的下端安装有万向轮(3)。
5.根据权利要求1所述的一种辅助机器人回收物品的装置,其特征在于:所述调节孔(11)为长孔,单个所述限位板(4)上设置有三个调节孔(11),且调节孔(11)等间距分布。
技术总结
本技术公开了一种辅助机器人回收物品的装置,包括支撑架、支撑台板、背板和限位板,所述支撑台板固定在支撑架上,限位板采用角钢支撑,限位板前端设置有向外的折弯部,限位板的水平面上设置有调节孔,限位板设置为两个,限位板采用螺栓穿过调节孔固定在支撑台板上,所述背板通过合页与支撑台板的前端转动连接,背板的背面远离合页的一侧设置有插销,支撑架的内侧面上设置有与插销对应的销孔,支撑架的后侧设置有后部档杆;本技术减少过程中人为作业,辅助人员更容易更换装置内的容器,提高更换储存容器的速度,增加机器人工作效率,容器位置可进行调节,而且固定精准,减轻背板重量,开合方便,满足使用需求。
技术研发人员:王俊杰,闫勇,王新安,刘佳林,曹泓怡,焦守臣,侯俊杰,刘桂斌,李国永,王海军,张会龙,吕明祥,杨晓东,王生伟,贾婉情,贺立新
受保护的技术使用者:河南新飞电器集团有限公司
技术研发日:20221115
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!